") 如何編寫RRT算法 初始化參數(shù)設(shè)置
如何編寫RRT算法 初始化參數(shù)設(shè)置
使用matlab2019來編寫RRT算法,下面將貼出部分代碼進(jìn)行解釋。
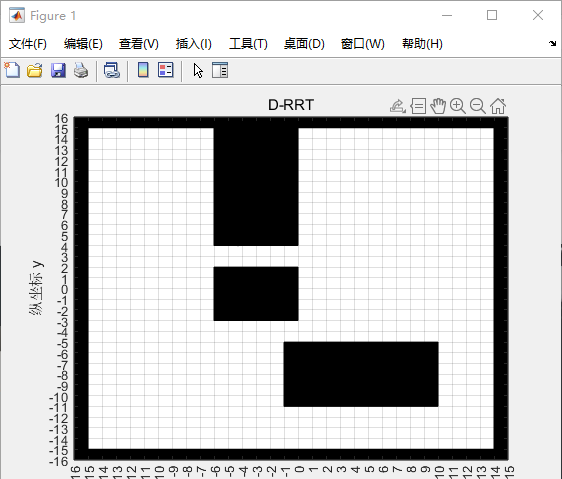
1、生成障礙物
在matlab中模擬柵格地圖環(huán)境,自定義障礙物位置。
%% 生成障礙物
ob1 = [0,-10,10,5]; % 三個矩形障礙物
ob2 = [-5,5,5,10];
ob3 = [-5,-2,5,4];
ob_limit_1 = [-15,-15,0,31]; % 邊界障礙物
ob_limit_2 = [-15,-15,30,0];
ob_limit_3 = [15,-15,0,31];
ob_limit_4 = [-15,16,30,0];
ob = [ob1;ob2;ob3;ob_limit_1;ob_limit_2;ob_limit_3;ob_limit_4]; % 放到一個數(shù)組中統(tǒng)一管理
x_left_limit = -16; % 地圖的邊界
x_right_limit = 15;
y_left_limit = -16;
y_right_limit = 16;
我在這隨便選擇生成三個矩形的障礙物,并統(tǒng)一放在ob數(shù)組中管理,同時定義地圖的邊界。
2、初始化參數(shù)設(shè)置
初始化障礙物膨脹范圍、地圖分辨率,機器人半徑、起始點、目標(biāo)點、生長距離和目標(biāo)點搜索閾值。
%% 初始化參數(shù)設(shè)置
extend_area = 0.2; % 膨脹范圍
resolution = 1; % 分辨率
robot_radius = 0.2; % 機器人半徑
goal = [-10, -10]; % 目標(biāo)點
x_start = [13, 10]; % 起點
grow_distance = 1; % 生長距離
goal_radius = 1.5; % 在目標(biāo)點為圓心,1.5m內(nèi)就停止搜索
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
matlab
+關(guān)注
關(guān)注
188文章
2998瀏覽量
233458 -
路徑規(guī)劃
+關(guān)注
關(guān)注
0文章
78瀏覽量
15437 -
RRT
+關(guān)注
關(guān)注
0文章
12瀏覽量
1180
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
液晶的初始化程序的編寫
如何根據(jù)數(shù)據(jù)手冊編寫12864的初始化程序,在數(shù)據(jù)手冊沒寫明初始化步驟的情況下,像延時多久,什么時候清屏等等?
發(fā)表于 04-07 15:11
想要調(diào)用相機的初始化函數(shù)該如何操作
我在調(diào)用庫函數(shù)節(jié)點時遇到了困難,就是我想要調(diào)用相機的初始化函數(shù),但是我不怎么明白它里面的參數(shù),還有在參數(shù)設(shè)置哪里我該怎么做,有幾個參數(shù),還有參數(shù)
發(fā)表于 07-31 17:27
DS278X 系列如何對其進(jìn)行初始化的參數(shù)設(shè)置呢?
DS278X 系列如何對其進(jìn)行初始化的參數(shù)設(shè)置呢? The Volt= 4055 The Current= 19923 The Temperature= 25 The AverageCurrent
發(fā)表于 09-03 10:53
初始化版圖的基本參數(shù)設(shè)置,導(dǎo)入網(wǎng)表
` 程序功能:初始化版圖的基本參數(shù)設(shè)置,導(dǎo)入網(wǎng)表,適用于新的項目開始設(shè)計的時候使用。這個程序免費,歡迎大家到Y(jié)EPEDA新浪博客下載使用。1、程序支持MILS和MM兩種單位的參數(shù)設(shè)置。2、程序可以
發(fā)表于 12-31 13:31
如何在simulink初始化電機參數(shù)
如何在simulink初始化電機參數(shù)?最近有很多同學(xué)問,在模型里面為什么有Ld、Lq、Ts等參數(shù),這些參數(shù)如何設(shè)置。這些
發(fā)表于 07-07 07:05
如何去編寫一種PWM初始化函數(shù)?
如何去編寫一種PWM初始化函數(shù)?ADC如何進(jìn)行初始化呢?電調(diào)首次使用為什么需設(shè)置量程?
發(fā)表于 07-21 07:34
PMAC_參數(shù)設(shè)置
PMAC_參數(shù)設(shè)置主要包括下位機環(huán)境變量、電機參數(shù)設(shè)置、PID參數(shù)調(diào)節(jié)。
發(fā)表于 04-26 10:32
?17次下載
FANUC電機參數(shù)初始化方法
代碼初始化: 設(shè)置3111#0,顯示伺服設(shè)定畫面。 由于標(biāo)準(zhǔn)參數(shù)文件中所使用的電機,與NC用戶實際所采用的電機可
發(fā)表于 10-09 15:14
?4次下載
如何排除代碼編寫器Studio 2和2.10的初始化問題
此應(yīng)用程序報告使讀者熟悉XDSPo探測實用程序。這個實用程序可能是用于排除代碼編寫器Studio 2和2.10的初始化問題通常表現(xiàn)為指示目標(biāo)DSP的錯誤消息。無法初始化。此問題可能是由于配置或硬件不正確造成的。
發(fā)表于 04-25 09:59
?4次下載
如何使用Protel99SE實現(xiàn)電子電路仿真時的參數(shù)設(shè)置方法概述
本文介紹了用 Pro tel 99 SE 實現(xiàn)電子電路仿真時有關(guān)參數(shù)的設(shè)置方法, 包括三極管極間電容的設(shè)置、激勵源參數(shù)的設(shè)置、仿真時間和仿真
發(fā)表于 12-10 08:00
?0次下載
霍爾無刷電機如何進(jìn)行程序初始化?
頻率下的振蕩周期的16倍2. 對PWM模塊進(jìn)行初始化,對PWM模塊進(jìn)行初始化的過程中需要進(jìn)行設(shè)置的主要PWM的時鐘,對其方式,PWM的極性,同時還需要對占空比和載波的周期值以及使能端來進(jìn)行
如何在Segger J-Flash中設(shè)置芯片初始化序列?
許多微控制器在燒錄之前需要一個自定義的初始化序列來初始化目標(biāo)硬件,例如初始化PLL時鐘,關(guān)閉看門狗或定義Flash的等待狀態(tài)。在使用這些對初始化過程有特殊要求的芯片時,在Segger
MCU單片機GPIO初始化該按什么順序配置?為什么初始化時有電平跳變?
GPIO初始化時有時鐘配置、模式配置、輸出配置、復(fù)用配置,那么在編寫初始化代碼時,到底該按什么順序執(zhí)行呢?如果順序不當(dāng)那初始化過程可能會出現(xiàn)短暫的電平跳變。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論