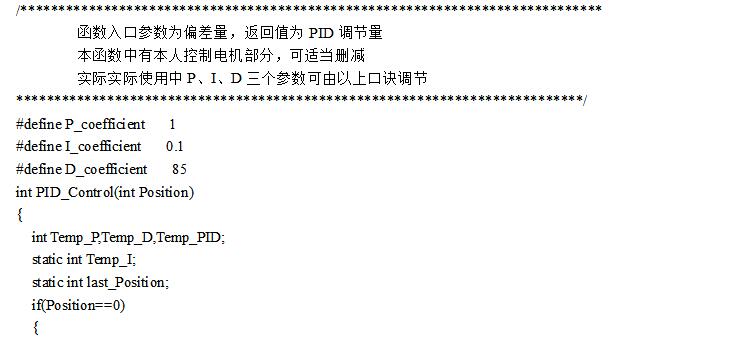
") PID算法的代碼實(shí)現(xiàn)
PID算法的代碼實(shí)現(xiàn)
舵機(jī)控制
在對(duì)舵機(jī)的控制中,我采用的是位置式PD算法。
將左右電感的偏差值賦給error,再代入公式進(jìn)行解算,最后傳給舵機(jī)輸出子函數(shù),控制舵機(jī)正確打角。
void steer_control()
{
error=AD_M_Left[0]-AD_M_Right[0];
direction_controlout=dirP*error+dirD*(error-lasterror);
angle=mid_angle+direction_controlout;
angle=angle >right_angle?right_angle:angle;
angle=angle< left_angle?left_angle:angle;
PWM_SetSteer((int)angle);
lasterror=error;
}
另外,如果想使舵機(jī)更順滑,可以對(duì)偏差error的計(jì)算進(jìn)行處理,如將歸一化后的值開方處理等。
在對(duì)電機(jī)的控制中,我采用的是增量式PID算法。
首先要設(shè)定一個(gè)目標(biāo)速度set_speed,再將當(dāng)前速度與其比較,得出的差值代入公式計(jì)算,得到最終需要輸出的電機(jī)占空比,從而控制電機(jī)轉(zhuǎn)速。
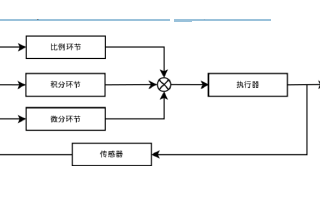
需要注意的是,電機(jī)PID控制作為閉環(huán)控制,最好將其放入PIT定時(shí)器中斷,同時(shí)在中斷中用左右兩個(gè)編碼器分別測(cè)出實(shí)時(shí)速度,這樣可以使其控制的更精確。
void PID_computer_newL(int left_speed_in)
{
ec_left=set_speed-left_speed_in;
pwm_L+=speedL_P*(ec_left)+speedL_I*(ec_left-eb_left)+speedL_D*(ec_left-2*eb_left+ea_left);
if(pwm_L > 600) pwm_L=600;
if(pwm_L< -600) pwm_L=-600;
PWM_SetMotorL((int)pwm_L);
ea_left=eb_left;
eb_left=ec_left;
}
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
PID
+關(guān)注
關(guān)注
37文章
1480瀏覽量
87469 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4372瀏覽量
64317 -
代碼
+關(guān)注
關(guān)注
30文章
4891瀏覽量
70315 -
控制算法
+關(guān)注
關(guān)注
4文章
170瀏覽量
22164
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
什么是PID,PID算法代碼實(shí)現(xiàn)
在直流有刷電機(jī)的基礎(chǔ)驅(qū)動(dòng)中,如果電機(jī)負(fù)載不變,我們只要設(shè)置固定的占空比(電壓),電機(jī)的速度就會(huì)穩(wěn)定在目標(biāo)范圍。
發(fā)表于 03-23 12:32
?1767次閱讀
PID控制算法代碼 PID控制算法的原理
算法的原理,然后帶大家使用FPGA來實(shí)現(xiàn)(C語言實(shí)現(xiàn)過程特別簡單)。 二. PID算法 PID取

C51實(shí)現(xiàn)PID算法代碼
C51實(shí)現(xiàn)PID算法代碼真正要用PID算法的時(shí)候,發(fā)現(xiàn)書上的
發(fā)表于 01-10 14:27
什么是PID控制算法?PID控制算法C語言是如何實(shí)現(xiàn)的?
什么是PID控制算法?PID控制算法C語言是如何實(shí)現(xiàn)的?特殊情況下的控制算法該如何去調(diào)整?比例、
發(fā)表于 06-29 09:24
PID算法的代碼實(shí)現(xiàn)
目錄一. 緒論二. 角度環(huán)串級(jí)PID原理1. PID基本算法2. 姿態(tài)角串級(jí)PID原理三. 如何用STM32實(shí)現(xiàn)角度-角速度的串級(jí)
發(fā)表于 08-17 06:44
使用C語言進(jìn)行PID算法實(shí)現(xiàn)
前文對(duì)PID算法離散化和增量式PID算法原理進(jìn)行來探索,之后又使用Matlab進(jìn)行了仿真實(shí)驗(yàn),對(duì)PID三個(gè)參數(shù)又有了更深入的認(rèn)識(shí),接下來我們
發(fā)表于 09-15 09:20
PID控制算法原理是什么?pid控制算法的c語言實(shí)現(xiàn)介紹和測(cè)試代碼概述
最近兩天在考慮一般控制算法的C語言實(shí)現(xiàn)問題,發(fā)現(xiàn)網(wǎng)絡(luò)上尚沒有一套完整的比較體系的講解。于是總結(jié)了幾天,整理一套思路分享給大家。
在工業(yè)應(yīng)用中PID 及其衍生算法是應(yīng)用最廣泛的
發(fā)表于 08-23 08:00
?46次下載
使用C語言實(shí)現(xiàn)51單片機(jī)中的PID算法代碼免費(fèi)下載
本文檔的主要內(nèi)容詳細(xì)介紹的是使用使用C語言實(shí)現(xiàn)51單片機(jī)中的PID算法代碼免費(fèi)下載。
發(fā)表于 09-25 17:17
?31次下載
PID算法原理_調(diào)試經(jīng)驗(yàn)以及代碼總結(jié)
PID算法原理_調(diào)試經(jīng)驗(yàn)以及代碼總結(jié)分享。
發(fā)表于 05-25 15:59
?16次下載
PID控制算法的C語言實(shí)現(xiàn)
PID算法C實(shí)現(xiàn)1、PID算法簡介1.1、各個(gè)環(huán)節(jié)的作用2、位置型PID
發(fā)表于 01-13 13:39
?45次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論