 電子發燒友App
電子發燒友App


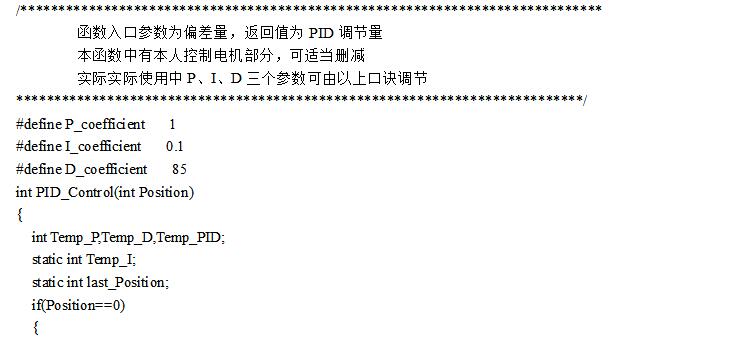
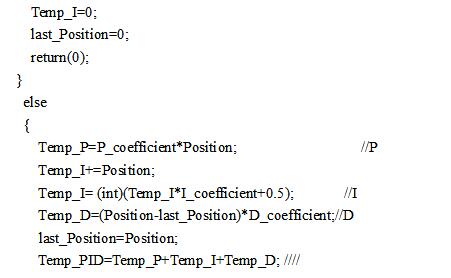
位置式PID的C語言寫法詳解
PID調節口訣:
參數整定找最佳,從小到大順序查
先是比例后積分,最后再把微分加
曲線振蕩很頻繁,比例度盤要放大
曲線漂浮繞大灣,比例度盤往小扳
曲線偏離回復慢,積分時間往下降
曲線波動周期長,積分時間再加長
曲線振蕩頻率快,先把微分降下來
動差大來波動慢,微分時間應加長
理想曲線兩個波,前高后低4比1
一看二調多分析,調節質量不會低

下面以PID調節器為例,具體說明經驗法的整定步驟:
A.、讓調節器參數積分系數S0=0,實際微分系數k=0,控制系統投入閉環運行,由小到大改變比例系數S1,讓擾動信號作階躍變化,觀察控制過程,直到獲得滿意的控制過程為止。
B、取比例系數S1為當前的值乘以0.83,由小到大增加積分系數S0,同樣讓擾動信號作階躍變化,直至求得滿意的控制過程。
C、積分系數S0保持不變,改變比例系數S1,觀察控制過程有無改善,如有改善則繼續調整,直到滿意為止。否則,將原比例系數S1增大一些,再調整積分系數S0,力求改善控制過程。如此反復試湊,直到找到滿意的比例系數S1和積分系數S0為止。
D、引入適當的實際微分系數k和實際微分時間TD,此時可適當增大比例系數S1和積分系數S0。和前述步驟相同,微分時間的整定也需反復調整,直到控制過程滿意為止。
PID參數是根據控制對象的慣量來確定的。大慣量如:大烘房的溫度控制,一般P可在10以上,I=3-10,D=1左右。小慣量如:一個小電機帶一臺水泵進行壓力閉環控制,一般只用PI控制。P=1-10,I=0.1-1,D=0,這些要在現場調試時進行修正的。
PID參數的設置的大小,一方面是要根據控制對象的具體情況而定;另一方面是經驗。P是解決幅值震蕩,P大了會出現幅值震蕩的幅度大,但震蕩頻率小,系統達到穩定時間長;I是解決動作響應的速度快慢的,I大了響應速度慢,反之則快;D是消除靜態誤差的,一般D設置都比較小,而且對系統影響比較小。對于溫度控制系統P在5-10%之間;I在180-240s之間;D在30以下。對于壓力控制系統P在30-60%之間;I在30-90s之間;D在30以下。
這里介紹一種經驗法。這種方法實質上是一種試湊法,它是在生產實踐中總結出來的行之有效的方法,并在現場中得到了廣泛的應用。
這種方法的基本程序是先根據運行經驗,確定一組調節器參數,并將系統投入閉環運行,然后人為地加入階躍擾動(如改變調節器的給定值),觀察被調量或調節器輸出的階躍響應曲線。若認為控制質量不滿意,則根據各整定參數對控制過程的影響改變調節器參數。這樣反復試驗,直到滿意為止。
經驗法簡單可靠,但需要有一定現場運行經驗,整定時易帶有主觀片面性。當采用PID調節器時,有多個整定參數,反復試湊的次數增多,不易得到最佳整定參數。
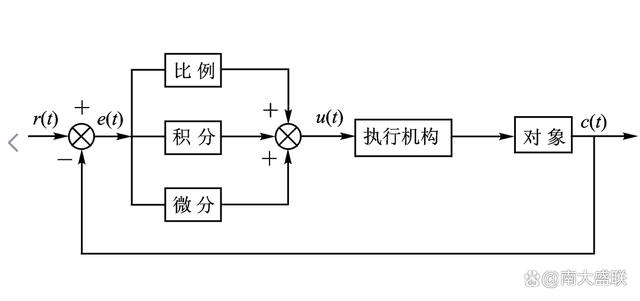
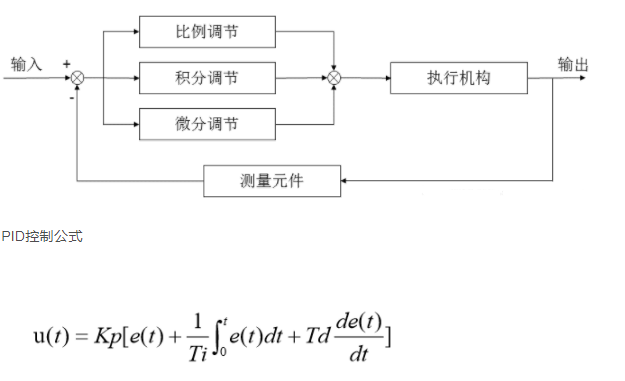
PID是比例,積分,微分的縮寫。
比例調節作用:是按比例反應系統的偏差,系統一旦出現了偏差,比例調節立即產生調節作用用以減少偏差。比例作用大,可以加快調節,減少誤差,但是過大的比例,使系統的穩定性下降,甚至造成系統的 不穩定。
積分調節作用:是使系統消除穩態誤差,提高無差度。因為有誤差,積分調節就進行,直至無差,積分調節停止,積分調節輸出一常值。積分作用的強弱取決與積分時間常數Ti,Ti越小,積分作用就越強。反之Ti大則積分作用弱,加入積分調節可使系統穩定性下降,動態響應變慢。積分作用常與另兩種調節規律結合,組成PI調節器或PID調節器。
微分調節作用:微分作用反映系統偏差信號的變化率,具有預見性,能預見偏差變化的趨勢,因此能產生超前的控制作用,在偏差還沒有形成之前,已被微分調節作用消除。因此,可以改善系統的動態性能。在微分時間選擇合適情況下,可以減少超調,減少調節時間。微分作用對噪聲干擾有放大作用,因此過強的加微分調節,對系統抗干擾不利。此外,微分反應的是變化率,而當輸入沒有變化時,微分作用輸出為零。微分作用不能單獨使用,需要與另外兩種調節規律相結合,組成PD或PID控制器。
位置式PID算法的C語言代碼
typedef struct{
float limit; //輸出限幅
float target; //目標量
float feedback; //反饋量
float Kp;
float Ki;
float Kd;
float eSum;
float e0; //當前誤差
float e1; //上一次誤差
}PIDType;
#define max(a, b) (a〉b? a:b)
#define min(a, b) (a《b? a:b)
#define range(x, a, b) (min(max(x, a), b))
float pid_pos_update(PIDType *p)
{
float pe, ie, de;
float out=0;
//計算當前誤差
p-〉e0 = p-〉target - p-〉feedback;
//誤差積分
p-〉eSum += p-〉e0;
//誤差微分
de = p-〉e0 - p-〉e1;
pe = p-〉e0;
ie = p-〉eSum;
p-〉e1 = p-〉e0;
out = pe*(p-〉Kp) + ie*(p-〉Ki) + de*(p-〉Kd);
//輸出限幅
out = range(out, -p-〉limit, p-〉limit);
return out;
}













 工商網監
工商網監
評論