") 西門子S7-200 SMART PLC-PID指令(下)
西門子S7-200 SMART PLC-PID指令(下)

二、PID指令介紹
1.指令說明
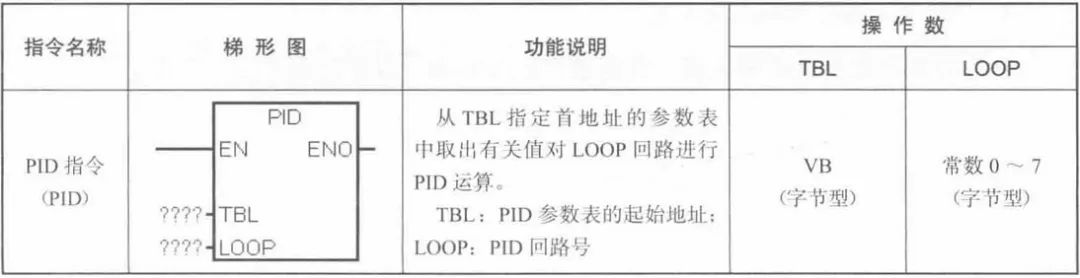
PID指令說明如表6-76所示。
表6-76PID指令說明
2.PID控制回路參數(shù)表
PID運(yùn)算由P(比例)、I(積分)和D(微分)三項運(yùn)算組成,PID運(yùn)算公式如下:
Mn=[KcX(SPn-PVn)]+[KcX(Ts/Ti)X(SPn-PVn)+Mx]+[KcX(Td/Ts*)X(SPn-PVn)]
在上式中,Mn為PID運(yùn)算輸出值,[Kc(SPn-PVn)]為比例運(yùn)算項,[KcX(Td/Ts)X(SP,-PV)+M]為積分運(yùn)算項,[KcX(T/T)X(SPn-PVn)]為微分運(yùn)算項。
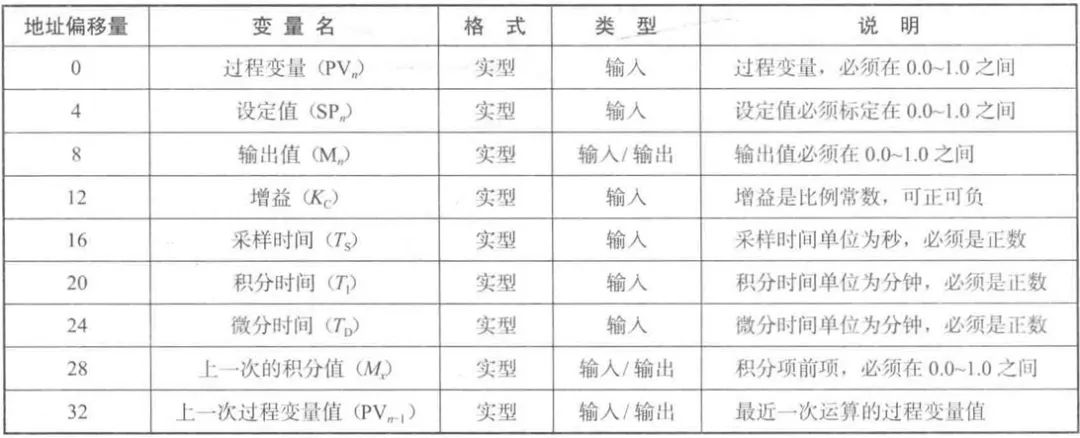
要進(jìn)行PID運(yùn)算,須先在PID控制回路參數(shù)表中設(shè)置運(yùn)算公式中的變量值。PID控制回路參數(shù)表見表6-77。在表中,過程變量(PVn)相當(dāng)于圖6-59中的反饋信號,設(shè)定值(SPn)
相當(dāng)于圖6-59中的給定信號,輸出值(Mn)為PID運(yùn)算結(jié)果值,相當(dāng)于圖 6-59中的控制
信號。如果將過程變量(PVn)值存放在VD200雙字單元,那么設(shè)定值(SPn)、輸出值(Mn)
則要分別存放在VD204、VD208單元。
表6-77PID控制回路參數(shù)表
3.PID運(yùn)算項的選擇
PID運(yùn)算由P(比例)、|(積分)和D(微分)三項運(yùn)算組成,可以根據(jù)需要選擇其中的一項或兩項運(yùn)算。
①如果不需要積分運(yùn)算,應(yīng)在參數(shù)表中將積分時間(Ti)設(shè)為無限大,這樣(Ts/Ti)
值接近0,雖然沒有積分運(yùn)算,但由于有上一次的積分值M,積分項的值也不為0.
②如果不需要微分運(yùn)算,應(yīng)將微分時間(Td)設(shè)為0.0。
③如果不需要比例運(yùn)算,但需要積分或微分回路,可以把增益(Kc)設(shè)為0.0,系統(tǒng)
會在計算積分項和微分項時,把增益(Kc)當(dāng)作1.0看待。
4.PID輸入量的轉(zhuǎn)換與標(biāo)準(zhǔn)化
PID控制電路有兩個輸入量:設(shè)定值和過程變量。設(shè)定值通常是人為設(shè)定的參照值,
如設(shè)置的水壓值;過程變量值來自受控對象,如壓力傳感器檢測到的水壓值。由于現(xiàn)實中
的設(shè)定值和過程變量值的大小、范圍和工程單位可能不一樣,在執(zhí)行PID指令進(jìn)行PID運(yùn)算前,必須先把輸入量轉(zhuǎn)換成標(biāo)準(zhǔn)的浮點型數(shù)值。
PID輸入量的轉(zhuǎn)換與標(biāo)準(zhǔn)化過程如下:
①將輸入量從16位整數(shù)值轉(zhuǎn)換成32位實數(shù)(浮點數(shù))。該轉(zhuǎn)換程序如圖6-60
所示。
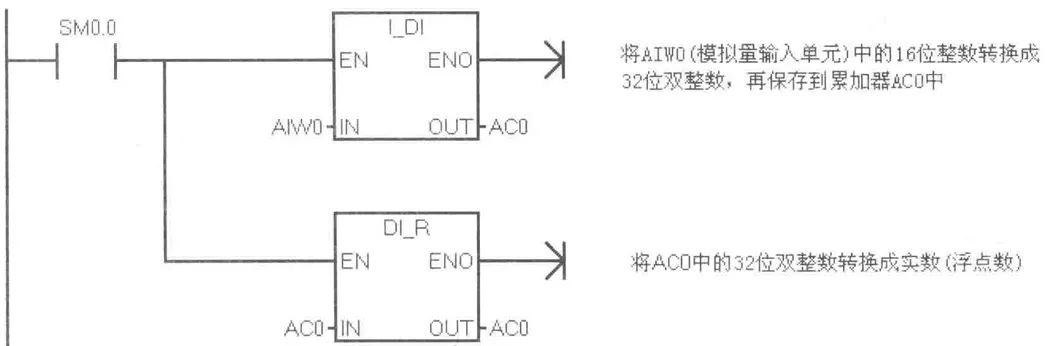
圖6-6016位整數(shù)值轉(zhuǎn)換成32位實數(shù)
②將實數(shù)轉(zhuǎn)換成0.0~1.0之間的標(biāo)準(zhǔn)化數(shù)值。轉(zhuǎn)換表達(dá)式為
輸入量的標(biāo)準(zhǔn)化值=輸入量的實數(shù)值1跨度+偏移量
跨度值通常取32000(針對0~32000單極性數(shù)值)或64000(針對-32000~+32000
雙極性數(shù)值);偏移量取0.0(單極性數(shù)值)或0.5(雙極性數(shù)值)。該轉(zhuǎn)換程序如圖6-61
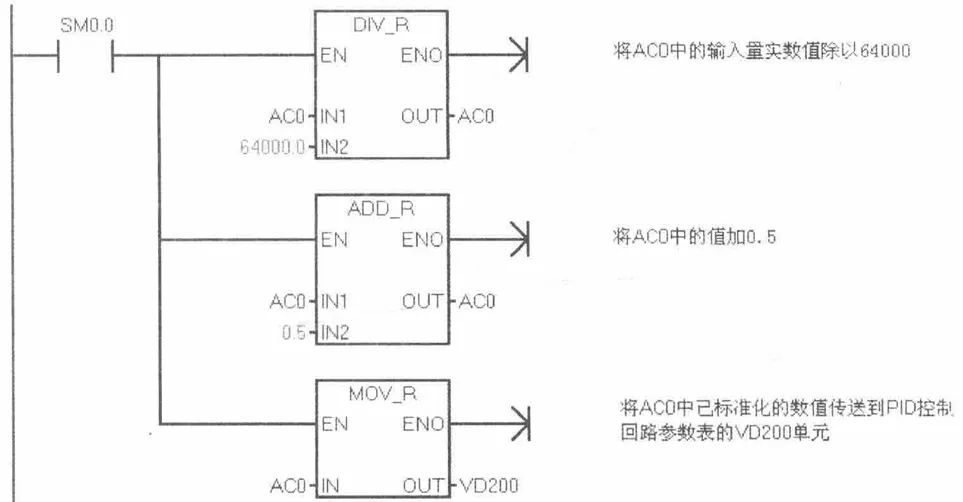
圖6-61
5. PID輸出量的轉(zhuǎn)換
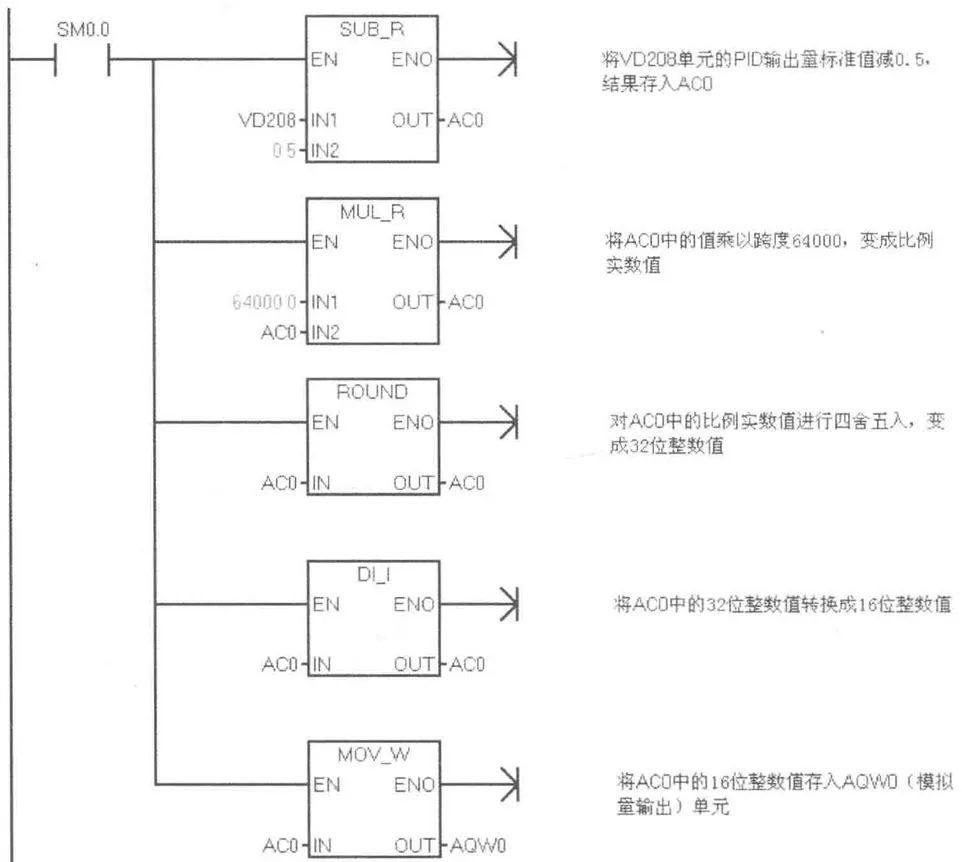
在PID運(yùn)算前,需要將實際輸入量轉(zhuǎn)換成0.0~1.0之間的標(biāo)準(zhǔn)值,然后進(jìn)行PID運(yùn)算,PID運(yùn)算后得到的輸出量也是0.0~1.0之間的標(biāo)準(zhǔn)值,這樣的數(shù)值無法直接驅(qū)動PID的控制對象,因此需要將PID運(yùn)算輸出的0.0~1.0標(biāo)準(zhǔn)值按比例轉(zhuǎn)換成16位整數(shù),再送到模擬量輸出單元,通過模擬量輸出端子輸出。
PID輸出量的轉(zhuǎn)換表達(dá)式為PID輸出量整數(shù)值=(PID運(yùn)算輸出量標(biāo)準(zhǔn)值-偏移量)x跨度
PID輸出量的轉(zhuǎn)換程序如圖6-62所示。
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
圖6-62
PID指令應(yīng)用舉例
下面以圖6-59所示的恒壓供水控制為例來說明PID 指令的應(yīng)用。
(1)確定PID控制回路參數(shù)表的內(nèi)容
在編寫PID控制程序前,首先要確定PID控制回路參數(shù)表的內(nèi)容。參數(shù)表中的給定值SPn增益值Kc、采樣時間Ts、積分時間下、微分時間Ti。需要在PID指令執(zhí)行前輸入,來自壓力傳感器的過程變量值需要在PID指令執(zhí)行前轉(zhuǎn)換成標(biāo)準(zhǔn)化數(shù)值并存入過程變量單元。參數(shù)表中的變量值要根據(jù)具體情況來確定,還要在實際控制時反復(fù)調(diào)試以
達(dá)到最佳控制效果。本例中的PID控制回路參數(shù)表的值見表6-78,因為希望水箱水壓維持在滿水壓的70%,故將給定值SPn設(shè)為0.7,不需要微分運(yùn)算,將微分時間設(shè)為0。
(2) PID控制程序
恒壓供水PID控制程序如圖6-63所示。
表6-78PID控制回路參數(shù)表的值
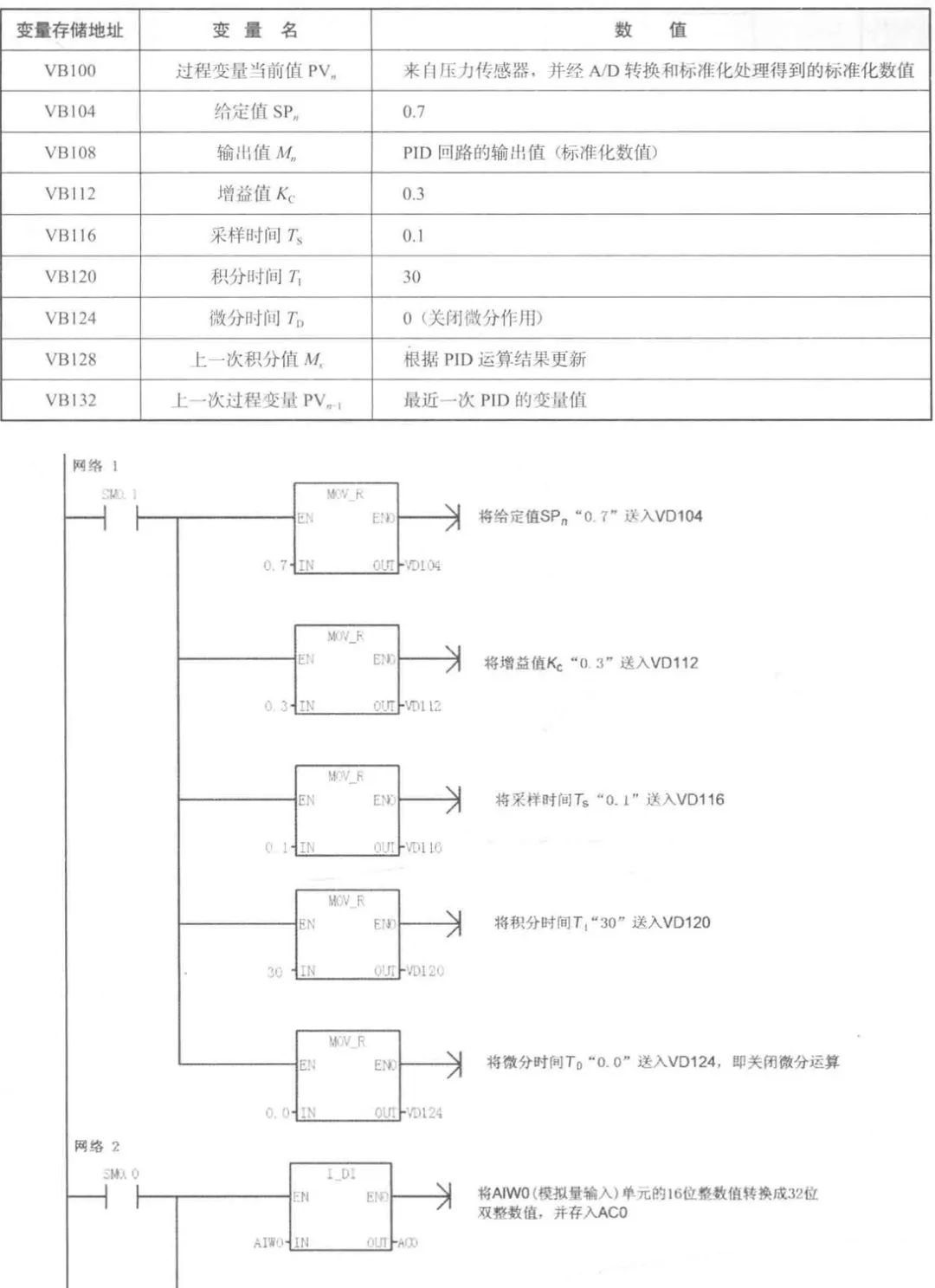
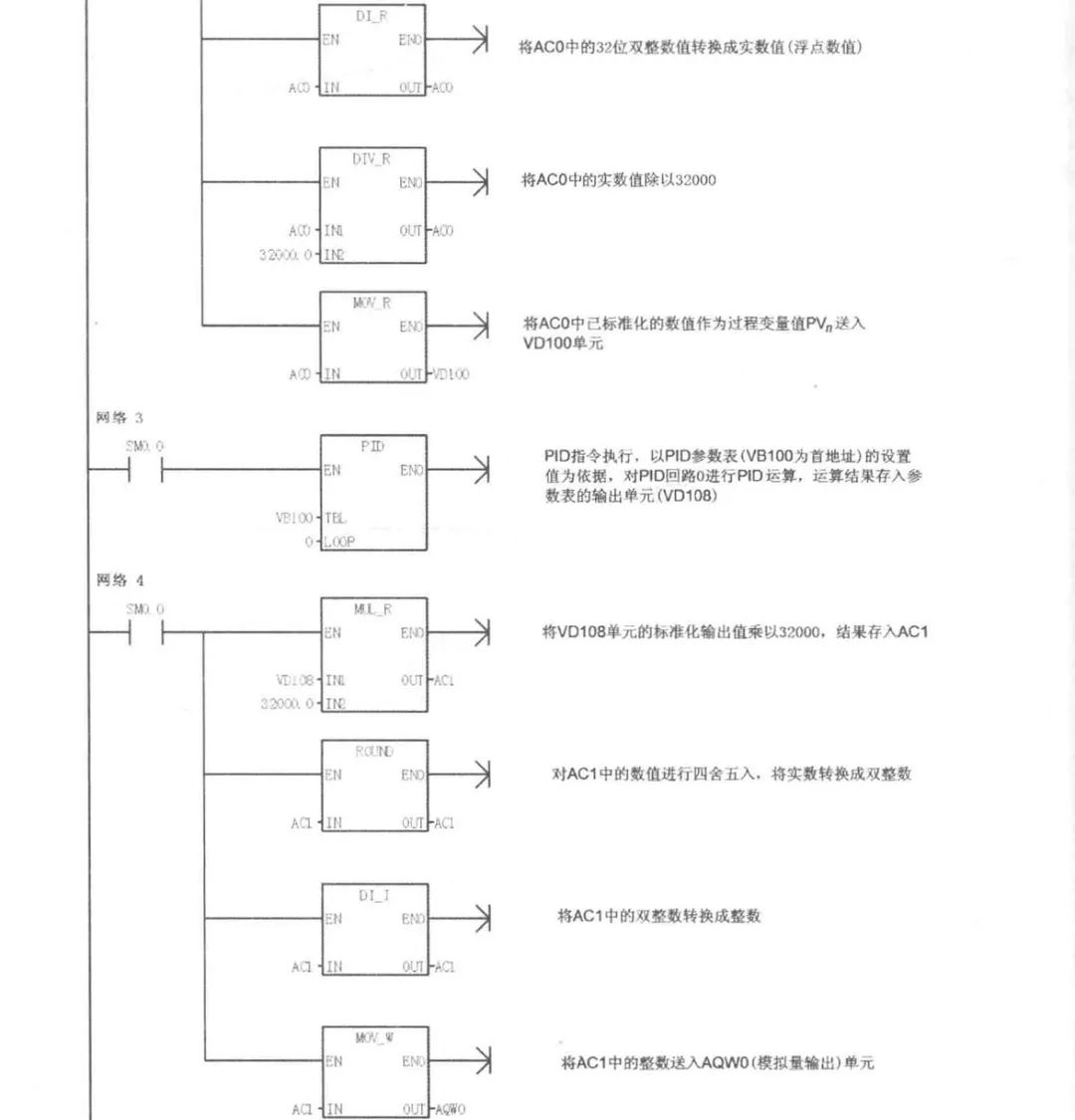
圖6-63恒壓供水PID控制程序
在程序中,網(wǎng)絡(luò)1用于設(shè)置PID控制回路的參數(shù)表,包括設(shè)置給定值SPn增益值Kc采樣時間Ts、積分時間Ti和微分時間Td:網(wǎng)絡(luò)2用于將模擬量輸入AIW0單元中的整數(shù)值轉(zhuǎn)換成0.0~1.0之間的標(biāo)準(zhǔn)化數(shù)值,再作為過程變量值PVn,存入?yún)?shù)表的VD100單元,AIW0單元中的整數(shù)值由壓力傳感器產(chǎn)生的模擬信號經(jīng)PLC 的A/D(模/數(shù))轉(zhuǎn)換模塊轉(zhuǎn)換而來;網(wǎng)絡(luò)3用于啟動系統(tǒng)從參數(shù)表取變量值進(jìn)行PID運(yùn)算,運(yùn)算輸出值M,存入?yún)?shù)表的VD108單元:網(wǎng)絡(luò)4用于將VD108中的標(biāo)準(zhǔn)化輸出值(0.0~1.0)按比例轉(zhuǎn)換成相應(yīng)的整數(shù)值(0~32000),再存入模擬量輸出 AQW0單元,AQW0單元的整數(shù)經(jīng)D/A(數(shù)/模)轉(zhuǎn)換模塊轉(zhuǎn)換成模擬信號,去控制變頻器工作頻率,進(jìn)而控制水泵電動機(jī)的轉(zhuǎn)速來調(diào)節(jié)水壓。
審核編輯:劉清
-
plc
+關(guān)注
關(guān)注
5036文章
13902瀏覽量
474259 -
西門子
+關(guān)注
關(guān)注
98文章
3169瀏覽量
118195 -
壓力傳感器
+關(guān)注
關(guān)注
35文章
2339瀏覽量
180236 -
PID控制
+關(guān)注
關(guān)注
10文章
461瀏覽量
41224 -
S7-200
+關(guān)注
關(guān)注
13文章
411瀏覽量
51395
原文標(biāo)題:西門子S7-200 SMART PLC-PID 指令及相關(guān)內(nèi)容說明(下)
文章出處:【微信號:中泰PLC自動化教學(xué),微信公眾號:中泰PLC自動化教學(xué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
S7-200西門子PLC視頻教程大全
西門子S7-200 PLC應(yīng)用100例

西門子S7-200以太網(wǎng)通訊解決方案

西門子PLC S7-200常見的71個故障匯總及解決辦法
西門子PLC S7-200smart程序下載錯誤分析
Simatic S7-200 SMART PLC介紹
西門子PLC S7-200 SMART PID控制功能分享

PLC西門子S7-200smart和S7-1200的區(qū)別?
西門子S7-200 Smart PLC加密設(shè)置全面指南

S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論