 KUKA機器人KR QUANTEC-2更換機器人手腕的步驟詳解
KUKA機器人KR QUANTEC-2更換機器人手腕的步驟詳解
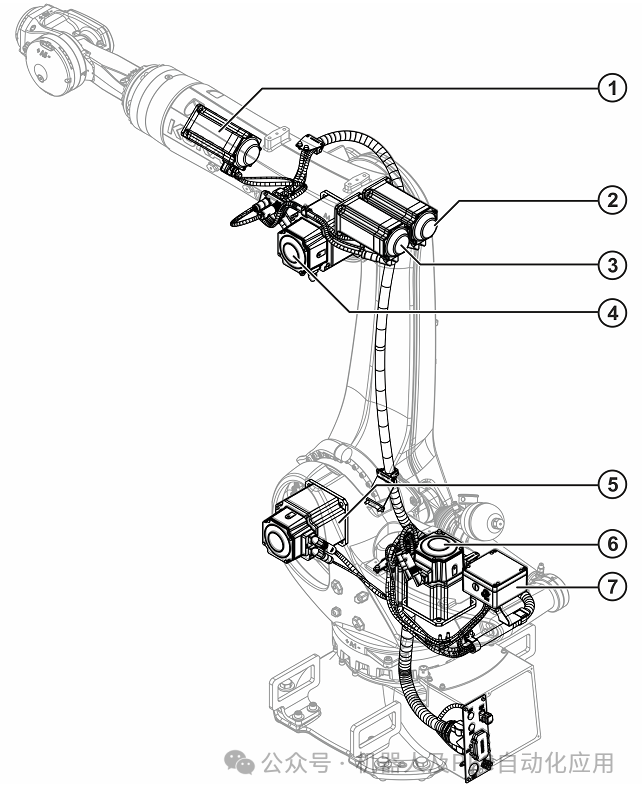
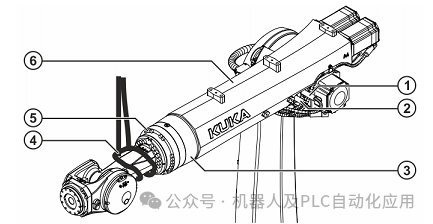
1 A6 電機
2 A5 電機
3 A4 電機
4 A3 電機
5 A2 電機
6 A1 電機
7 RDC 盒
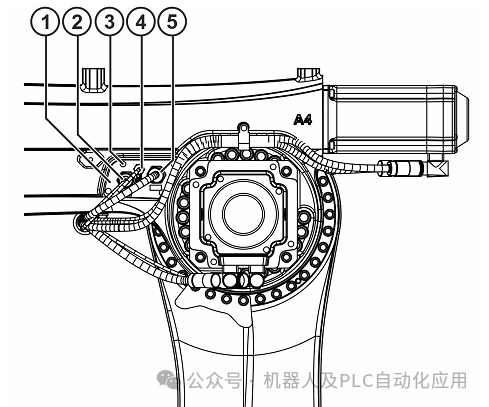
拆卸 A4 電機和 A5 電機,以下工作步驟相同。
1. 將設備插座上的插頭 XM4 和 XP4 松開并拔下。
2. 擰出 A4 電機上的 4 根內六角螺栓 M8x25-8.8-A2K。
3. 松開 A4 電機并將其與 A4 連接軸一起拉出;拉出時不要歪斜。
4. 放下 A4 電機與 A4 連接軸。
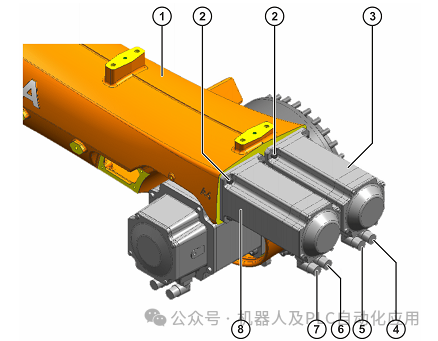
1 機器人小臂
2 內六角螺栓 M8x25-8.8-A2K
3 A5 電機
4 插頭 XM5
5 插頭 XP5
6 插頭 XM4
7 插頭 XP4
8 A4 電機
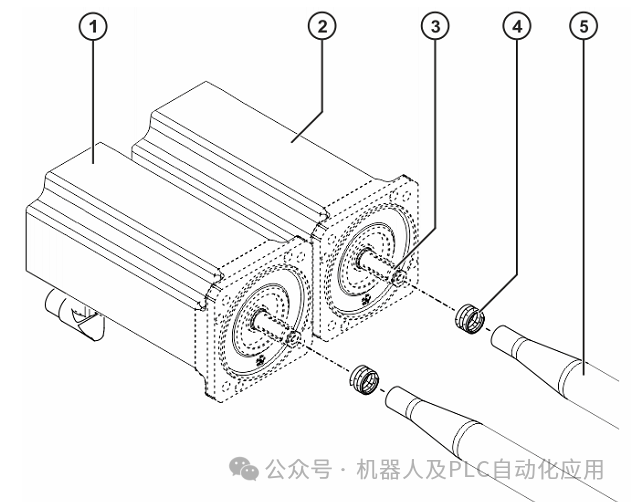
5. 將 A4 連接軸從電機軸上拔下。
6. 從電機軸上取下壓縮彈簧和墊圈。
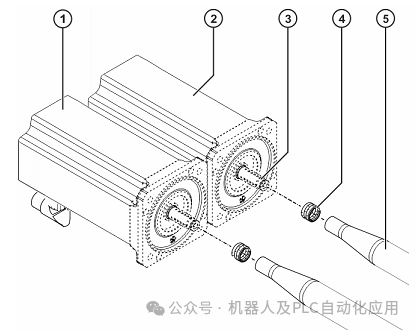
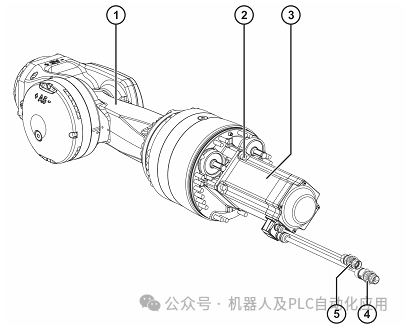
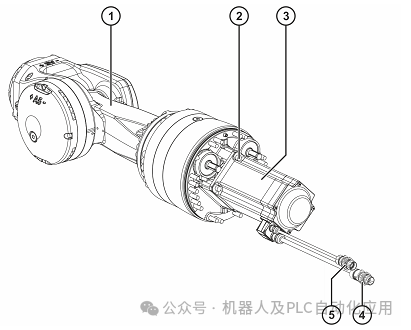
1 A5 電機
2 A4 電機
3 帶漸開線齒輪的電機軸
4 壓縮彈簧
5 A4 連接軸
7. 如果不重新安裝電機,則專業地廢棄處理電機或進行防銹處理并存放。
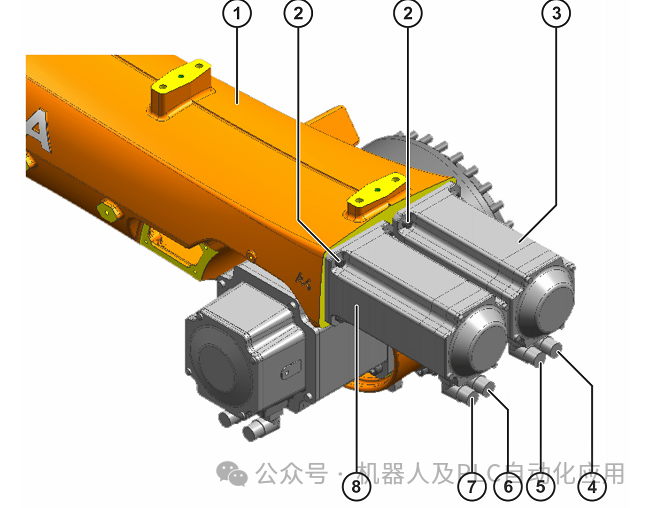
拆卸機器人手腕
將吊帶固定在機器人手腕和起重機上。
2. 移動起重機,直至起重機承受機器人手腕的重量。
3. 將電機插頭 XM6 和 XP6 從板上松開并拔下。
4. 擰出板上的 4 個內六角螺栓 M6x12-8.8-A2K。
5. 將電機插頭 XM6 和 XP6 以及可能有的吹洗空氣管從板背面上松開并拔下。
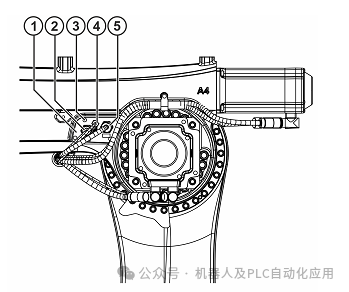
1 板
2 插頭 XP6
3 內六角螺栓 M6x12-8.8-A2K
4 吹洗空氣(僅限 Foundry)
5 插頭 XM6
6. 從機器人手腕中擰出 20 個內六角螺栓 M10x200-10.9。
7. 小心地從機器人小臂上松開機器人手腕并用起重機拉出機器人手腕。拉出時不得歪斜。機器人小臂和機器人手腕之間的間隙在圓周上的任何部位都必須相同。在拉出的同時移動起重機。
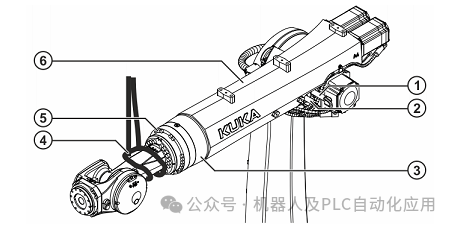
1 插頭 XM6
2 插頭 XP6
3 機器人手腕
4 吊帶
5 內六角螺栓 M10x200-10.9
6 機器人小臂
8. 在合適的墊板上放下機器人手腕并拆除吊帶。
拆卸 A6 電機
1. 松開并取下 A6 電機上的 4 個內六角螺栓 M8x30-8.8-A2K。
2. 松開并取下 A6 的電機。
1 機器人手腕
2 內六角螺栓 M8x30-8.8-A2K
3 A6 電機
4 插頭 XP6
5 插頭 XM6
3. 如果不重新安裝電機,則專業地廢棄處理電機或進行防銹處理并存放。
準備新的機器人手腕
1. 必要時,應給新機器人手腕除去防銹保護。
2. 安裝前先清潔所有嚙齒,然后涂上少許 潤滑脂 Microlube GL 261,但
要涂全。
安裝 A6 電機
1. 布置好電機插頭 XM6 和 XP6,使其在插入電機后傾斜地位于左下方。
2. 將 A6 的電機裝入機器人手腕內;安裝時不要歪斜,注意是否正確固定(嚙合)。
3. 裝入 4 個內六角螺栓 M8x30-8.8-A2K。分幾次逐步增加擰緊扭矩至規定的數值。
4. 用螺栓加固漆標記螺栓。
安裝機器人手腕
在機器人手腕上固定吊帶。
用起重機吊起機器人手腕,運至安裝地點并確保軸 4 和 5 位于零位。
3. 將機器人手腕裝入機器人小臂,同時將電機電纜穿入機器人小臂并確保其不會纏繞在連接軸上。在插入時不要傾斜并且同時移動起重機。機器人小臂和機器人手腕之間的間隙在圓周上的任何部位都必須相同。
4. 將電機插頭 XM6 和 XP6 穿過機器人小臂中的開口并連接在板背面上。
5. 將 20 個新的內六角螺栓 M10x200-10.9 插入機器人手腕。
6. 用扭矩扳手交替擰緊 20 個內六角螺栓 M10x200-10.9。分幾次逐步增加擰緊扭矩至規定的數值。
7. 拆除吊帶。
8. 用 4 個內六角螺栓 M6x12-8.8-A2K 將板固定在機器人小臂上。
9. 將插頭 XM6 和 XP6 以及可能有的吹洗空氣管連接在板正面上。注意插頭的針腳和編碼。在安裝插頭時要扭動插頭,直到感覺到(防扭轉)插頭卡入到編碼中。
安裝 A5 電機
對于 A4 電機和 A5 電機,以下工作步驟相同。
1. 如果安裝新的電機,則在安裝前除去新電機的防銹保護。
2. 清潔 A5 連接軸和 A5 電機軸上的齒輪并檢查其是否磨損。在損壞和/或磨損時,必須更換 A5 連接軸。
3. 給 A5 連接軸上的齒部涂上少許油脂 Microlube GL 261,但要涂全。
4. 將壓縮彈簧裝到 A5 電機軸上。如果在拆卸電機時電機軸上有墊圈,則在安裝新的電機時不允許將其重新裝入,而是必須廢棄處理。
5. 將 A5 連接軸裝到 A5 電機軸上。
6. 支承面(A5 電機和機器人小臂)必須無脂和無塵。
7. 布置設備插座 XM5 和 XP5,使其在 A5 電機裝入機器人小臂后位于下側。
8. 吊起 A5 電機,然后裝入機器人小臂;安裝時不要歪斜,并注意機器人手腕中的連接軸是否正確固定(嚙合)。
9. 裝入 4 個內六角螺栓 M8x25-8.8-A2K。
10. 用扭矩扳手對角交錯擰緊 4 個內六角螺栓 M8x25-8.8-A2K。分幾次逐步增加擰緊扭矩至規定的數值。
11. 將插頭 XM5 和 XP5 連接到設備插座上。注意插頭的針腳和編碼。在安裝插頭時要扭動插頭,直到感覺到(防扭轉)插頭卡入到編碼中。
審核編輯:劉清
-
電機
+關注
關注
143文章
9263瀏覽量
148630 -
RDC
+關注
關注
0文章
26瀏覽量
9327 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
9514
原文標題:KUKA 機器人KR QUANTEC-2更換機器人手腕
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論