 用于微納機器人多級磁控遞送研究的體外測試平臺
用于微納機器人多級磁控遞送研究的體外測試平臺

基于微納機器人的靶向遞送技術在疾病診斷治療、精準藥物遞送、無創手術等生物醫學領域具有廣闊的應用前景。
然而,現有的微納機器人遞送策略面臨導航距離有限和易被流體沖散等挑戰。同時,微納機器人的體外測試平臺通常缺乏必要的微生理環境,而活體動物模型受限于成像分辨率,對微納機器人進行實時成像和精確操控仍面臨挑戰。
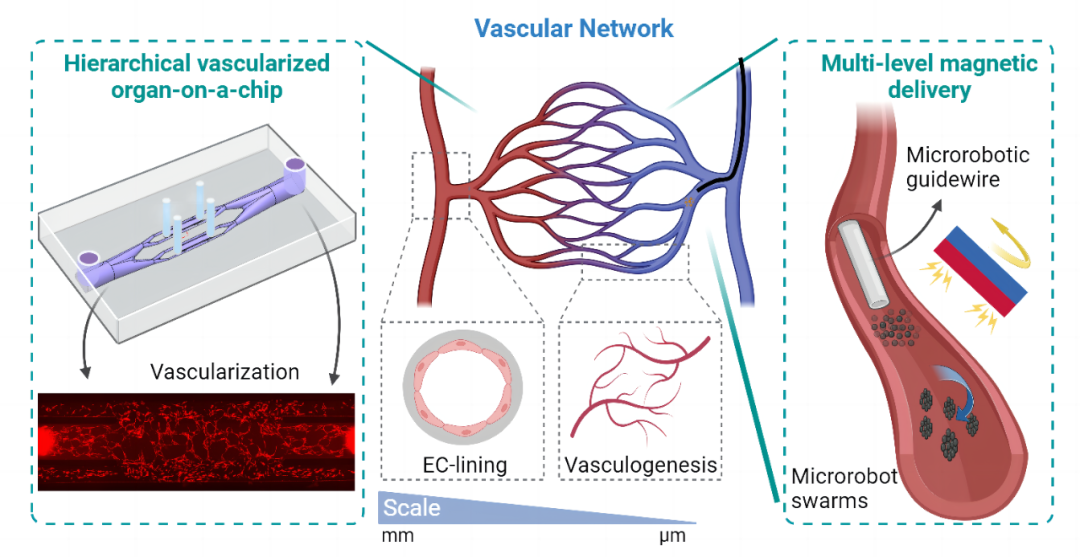
近日,上海交通大學王曉林團隊提出了一種基于層級血管化器官芯片的微納機器人多級磁控遞送策略。首先,研究人員提出了一種層級血管化器官芯片設計,通過微納3D打印技術制備出多尺度微流控器官芯片,進一步結合內皮細胞內襯和血管生成機制,構建出從微米到毫米尺度的層級血管網絡,為微納機器人的測試提供了一個兼備成像、控制和微生理環境的體外生物模型。
基于該模型平臺,通過結合栓系磁致動導絲和無栓系游動微納機器人,提出了一種多級磁控遞送策略,有效克服微納機器人個體運動能力有限及導絲機器人難以進入微小血管的挑戰,在復雜動態生理環境下實現了穩定、高效及長距離的微納機器人遞送,有望推動微納機器人在精準藥物遞送、智能感知與診斷、血栓消融等領域的應用。
 ?
?
該成果以“Multi-level magnetic microrobot delivery strategy within a hierarchical vascularized organ-on-a-chip”為題,發表在英國皇家化學會期刊Lab on a Chip上,并被央視《新聞直播間》播出的“科技推動力”欄目以“器官芯片模型:模擬人體器官研究藥物遞送”為題進行了相關報道。
論文信息:
https://doi.org/10.1039/D3LC00770G
審核編輯:劉清
-
機器人
+關注
關注
213文章
29600瀏覽量
212127 -
微流控芯片
+關注
關注
13文章
302瀏覽量
19269 -
3D打印
+關注
關注
27文章
3587瀏覽量
111914
原文標題:基于層級血管化器官芯片的體外測試平臺,用于微納機器人多級磁控遞送研究
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
安泰高壓放大器在微納機器人研究中的應用介紹
輪式移動機器人電機驅動系統的研究與開發
納芯微磁傳感器技術推動人形機器人性能提升

【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
從控制到感知,一文讀懂納芯微的人形機器人布局(下篇)

從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

pogopin磁吸連接器應用于機器人行業的優勢分析
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「具身智能機器人系統」閱讀體驗】+初品的體驗
基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型

為灣區強“芯”!廣東微納院半導體微納加工中試平臺正式通線
六軸焊接機器人多久檢修一次





 工商網監
工商網監
評論