 機器人運動學中的非完整約束與運動模型推導
機器人運動學中的非完整約束與運動模型推導

動力學與運動學
機器人的動力學描述了作用在機器人上的力與機器人物理狀態的變化之間的關系。例如,自動駕駛汽車的動力學將描述加速度和由輪胎、重力、空氣動力學等引起的力之間的關系。
機器人的運動學描述了對機器人運動的不由力引起的額外的限制或約束。例如,具有多個關節的機械臂受到運動學約束,因為每個關節上的剛性連接只允許繞單個軸旋轉。
機器人或自動駕駛車輛都要綜合考慮動力學和運動學,某些情況 為了簡化運算,在不追求精確的情況下,動力學和運動學都有可能被簡化考慮。比如有些情況,車會被簡化為一個質點,等等情況。
運動學約束
1. 廣義坐標
廣義坐標指的是一組可以完全指定機器人的唯一位置的坐標。廣義,顧名思義,這個坐標中的值除了我們熟知的x、y、z,也可能包括其他狀態量,是一個泛泛的坐標概念。

2. 運動學約束
機器人運動學中的運動學約束是指機器人在運動過程中受到的限制,包括位置、姿態、速度和加速度等因素。這些約束會對機器人的自由度產生影響,從而影響機器人的運動和控制。運動學約束通常用數學模型來描述,為機器人的運動控制提供了理論基礎。

針對n維的廣義坐標,他的運動學約束一定是小于n的(不然,大于等于n,方程直接求解了,還運動啥。。。)。
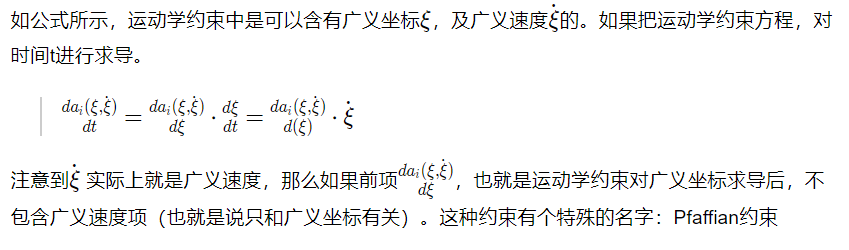
Pfaffian約束(普法夫約束)是一種特殊的運動學約束,Pfaffian約束是由k個線性無關約束的集合,且這些約束相對于廣義速度是線性的約束。
3. 完整約束和非完整約束(Holonomic and Nonholonomic Constraints)
當運動學約束函數中只包含廣義坐標(不依賴廣義速度)的函數,就是一個完整約束。滿足完整約束的系統就是一個完整系統。完整約束系統可以表達為

不能用上式表示的系統,就是一個非完整系統。完整系統的完整約束方程與位置、時間有關,與速度無關。
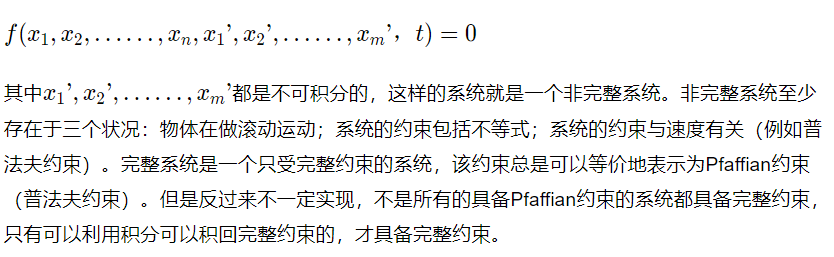
非完整系統主要表現特征是存在不可積分的微分約束。非完整約束系統的表達式如下:
完整約束限制了廣義坐標的全部值,如果系統的每個狀態均用廣義坐標來表示的話,完整約束實際上限制的,就是系統可以達到的全部有效狀態。
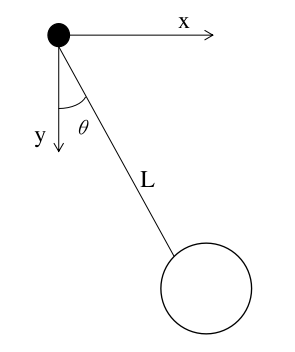
不太好理解,需要我們結合幾個例子來簡單了解一下就可以了:一個單擺系統,在無外力干擾的情況下,擺錘的廣義坐標只有x和y,它們的值會一直滿足一個圓弧的約束,且與速度無關,所以單擺系統就是一個完整系統,滿足一個完整約束。
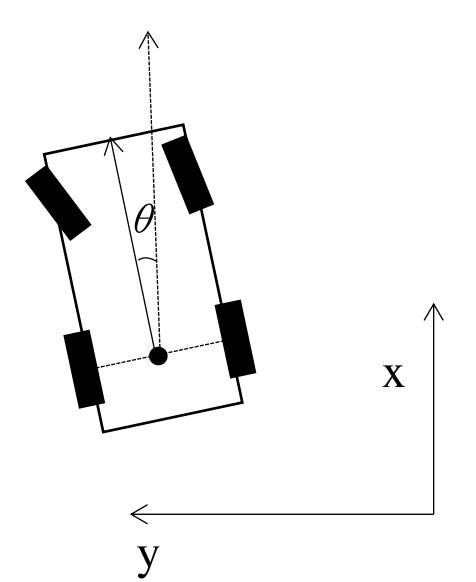
一個簡單移動機器人系統,它的廣義坐標為(x, y, θ),在理想情況下該機器人不可以發生平移。不能平移的條件就是,車輪在橫向方向的速度為0。它是一個普法夫約束,但該普法夫約束不能積分為完整約束,所以該系統是一個非完整系統,具備非完整約束。
完整約束就是狀態之間的到達沒有限制,而非完整約束就是狀態間的到達必須滿足一些固定條件
總之,如果機器人約束方程中包含坐標對時間的導數(如運動約束),而且方程不可能積分為有限形式,這類約束稱為非完整約束。非完整約束方程總是微分方程的形式。反之,如果機器人約束方程中不包含坐標對時間的導數,或者約束方程中的微分項可以積分為有限形式,這類約束稱為完整約束。
運動學模型
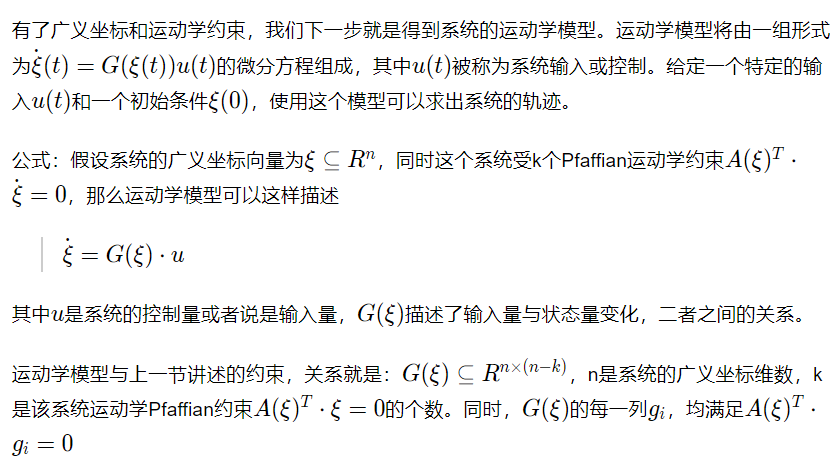
運動學模型的方程組,實際上就是描述了狀態的微分量與控制量的關系,每一次的控制量作用于該系統能帶來狀態量多少改變。而它們之間的那個變化關系,是與系統的約束相關的。
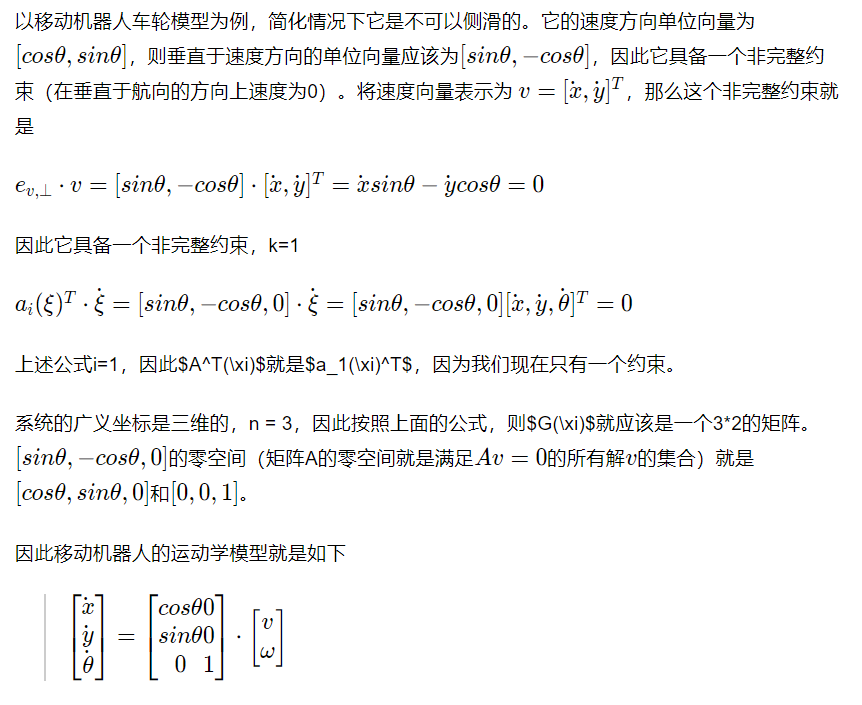
式子中,v就是車輛的速度,w就是車輛旋轉的角速度。發沒發現,其實這個運動學公式我們本可以直接寫出,但我們通過約束方程推出了相同的結論。
-
機器人
+關注
關注
213文章
29615瀏覽量
212178 -
機械臂
+關注
關注
13文章
551瀏覽量
25304 -
自動駕駛
+關注
關注
788文章
14266瀏覽量
170172
原文標題:機器人運動學中的非完整約束與運動模型推導
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
LabVIEW的六軸工業機器人運動控制系統
先進機器人控制
scara機器人運動學反解,各位大佬求救吖
基于回轉變換張量的6R機器人運動學研究
基于MATLAB的機器人運動仿真研究
神經網絡在機器人運動控制中的應用
基于GARBF網絡的機器人逆運動研究設計

自動駕駛車輛控制(車輛運動學模型)






 工商網監
工商網監
評論