 步進電機控制器電路圖分享
步進電機控制器電路圖分享
什么是步進電機控制器?
步進電機控制器是一種能夠發出均勻脈沖信號的電子產品,主要用于控制步進電機的運動。它發出的信號進入步進電機驅動器后,會由驅動器轉換成步進電機所需要的強電流信號,帶動步進電機運轉。
步進電機控制器的工作原理是通過微處理器或微控制器,根據輸入的脈沖信號,按照設定的步進角度和速度,輸出相應的脈沖信號給步進電機驅動器,驅動器將脈沖信號轉換成步進電機的角位移或直線位移,使電機按照設定的角度或距離進行轉動或移動。
步進電機控制器在許多領域都有應用,例如:自動化生產線、機器人、機床、打印機、醫療設備、航空航天等。在這些領域中,步進電機控制器可以用于精確控制電機的轉角、轉速和方向,從而實現精確的位置控制和速度控制。同時,步進電機控制器還可以通過編程實現復雜的運動軌跡和自動化操作,提高了生產效率和設備的自動化程度。
接下來小編給大家分享一些步進電機控制器電路圖,以及簡單分析它們的工作原理。
步進電機控制器電路圖分享
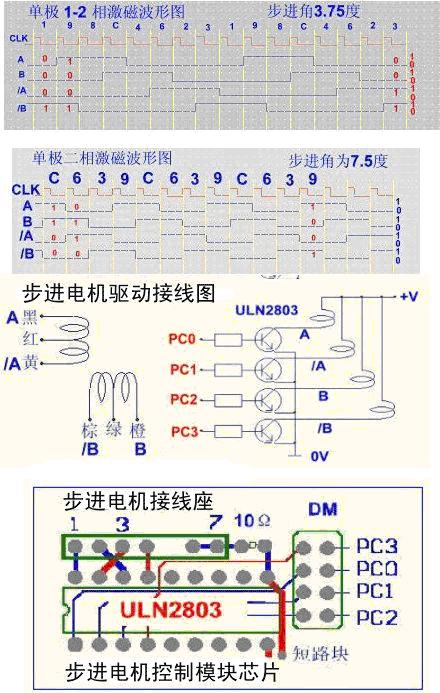
步進電機控制器電路圖(1)
步進電機是一種無刷直流電機,它將單次旋轉分為多個相等的步數。這些類型的電機廣泛用??于機器人技術和其他精確運動起著至關重要作用的應用。本電路教程演示了使用 IC 4070 和 IC 4013 構建和工作步進電機控制器。
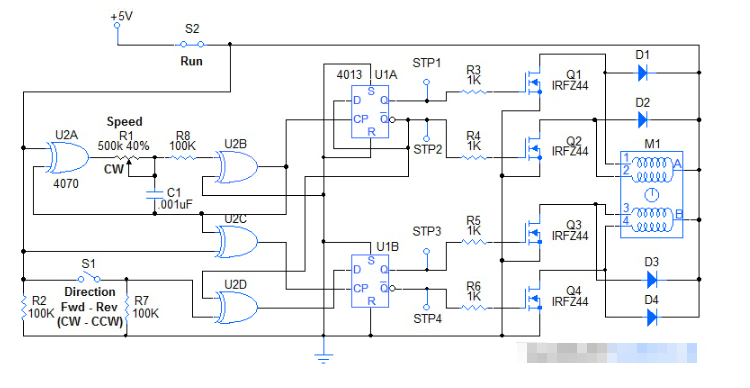
參考原理圖,兩個IC的U1A、B和U2A、B、C、D組成振蕩器,以及驅動步進電機M1所需的正反轉正交信號。具體來說,異或門U2A作為反相器接線,U2B作為緩沖器接線,與R1、C1和R8形成振蕩電路。電阻器R8用于保護U2B的輸入免受過高的過電壓和過電流的影響。 C1和R1決定振蕩器的頻率。隨著 R1 減小(變為 CW),頻率增加,步進速率也增加。如果需要較慢的步進速率,可以根據需要增加 C1 的值。
U2B 連接到雙觸發器、U1A 時鐘輸入和 U2C。 U2C 作為反相器接線,為 U1B 提供反相時鐘。 U1A 的 Qnot 輸出連接到 U1A 的數據輸入。因此,當U1A看到時鐘的每個上升沿時,U1A的Q和Qnot的輸出狀態被切換(反轉)。
開關 S1 連接到 R7 和異或門 U2D 的輸入。當按下S1時,U2D作為反相器工作。當S1打開時,U2D充當緩沖器。 U1A 的 Qnot 輸出連接到 U2D 的另一個輸入。 U2D 的輸出連接到 U1B 的數據輸入。由于 U1B 的時鐘輸入與 U1A 的時鐘輸入互補,因此 U1B 的輸出將在 U2A、B、C 時鐘的相對邊沿更新。由于 U2D 反轉或只是緩沖 U1A 的 Qnot 輸出。 U1B 的輸出將超前或滯后 U1A 的輸出 90 度,從而產生所需的正交輸出。
電路的其余部分很簡單。 R3-6 為驅動晶體管 Q1-4 提供電流。它們顯示為 IRFZ44、n 溝道 MOSFET,但可以使用任何 n 溝道 MOSFET 或 BJT (NPN) 晶體管,前提是所使用的步進電機具有足夠的增益和額定電流。 D1-4為驅動器提供反激保護,以釋放步進電機線圈中的磁場能量。
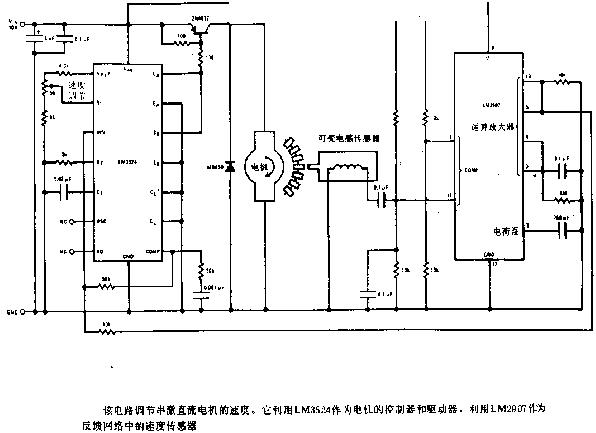
步進電機控制器電路圖(2)
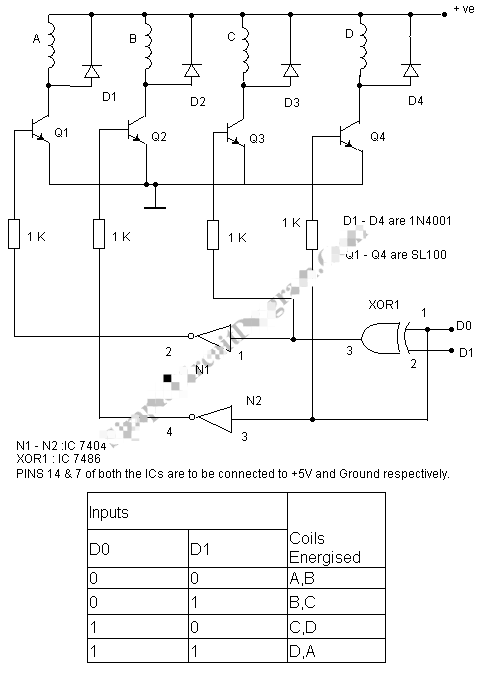
這是僅使用基本部件的簡單步進電機控制器的電路圖。驅動電路使用四個晶體管(SL100)驅動電機繞組,兩個非門和一個異或門解碼兩位控制邏輯來驅動電機的四個繞組。二極管D1至D4保護相應的晶體管免受電機繞組切換期間產生的瞬變的影響。 d0 和 d1 是確定旋轉方向和速度的控制邏輯。

該電路的控制邏輯可以從由555非穩態多諧振蕩器提供時鐘的2位向上/向下計數器獲得。計數方向決定旋轉方向,非穩態多諧振蕩器的頻率決定旋轉速度。
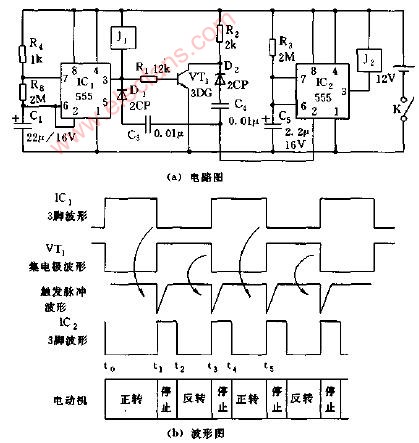
如上圖所示,IC1a IC1b 屬于同一個 IC 7404。 IC1和IC2的引腳14和引腳7必須分別連接至+5V和地,盡管電路圖中未示出。5V可以從基于7805的電源電路獲得。
Vcc是步進電機所需的電壓。它因電機而異。這里我們可以使用最高24V的步進電機。為了獲得更高的工作電壓和功率,必須將 SL100 晶體管替換為更高功率的晶體管,例如 2N3055。
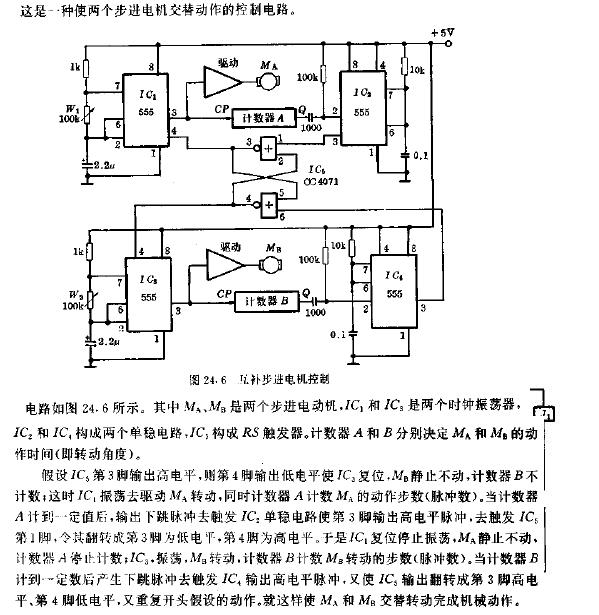
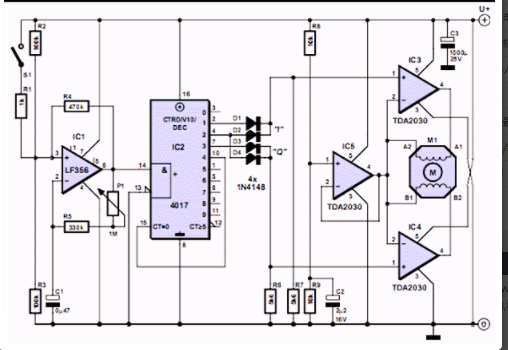
步進電機控制器電路圖(3)
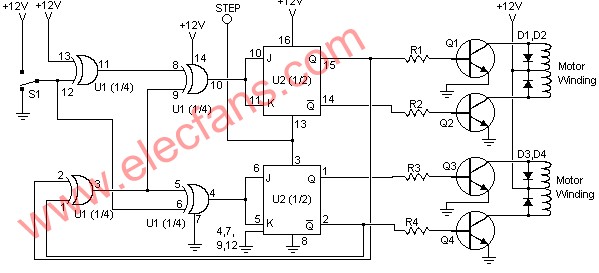
步進電機是進行高精度運動控制的簡單方法。步進電機的工作需要一個步進電機控制電路。步進電機控制器通常使用微控制器來完成復雜的任務。有些控制器使用步進電機IC來簡化電路設計。對于簡單的任務,例如以恒定速度旋轉,可以使用分立元件構建簡單的控制器電路。
最終的步進電機驅動器使用晶體管來驅動電機線圈。看一下表格,你會發現如果你想讓這個步進驅動器移動電機,你需要一個2位自由運行計數器。如果您有一個可逆計數器電路,您將獲得一個向上-向后步進電機控制。如果為每個 SL100 晶體管安裝合適的散熱器,該步進電機控制電路可提供高達 500 mA 的電流。通過在達林頓配置中使用 2N3055 晶體管和 SL100 晶體管,可以實現更高的電流。
-
電路圖
+關注
關注
10404文章
10733瀏覽量
541152 -
驅動器
+關注
關注
54文章
8640瀏覽量
149174 -
控制器
+關注
關注
114文章
16995瀏覽量
183112 -
振蕩器
+關注
關注
28文章
3969瀏覽量
140474 -
步進電機
+關注
關注
152文章
3161瀏覽量
149216
發布評論請先 登錄








 工商網監
工商網監
評論