 基于實車在環(ViL)的自動駕駛功能一致性評估
基于實車在環(ViL)的自動駕駛功能一致性評估

作者 | Br1anQ、Chrans
小編 | 不吃豬頭肉
 引言
引言
自動駕駛功能的開發和評估在汽車行業內已經很常見了。尤其是自動泊車功能,其低速和小范圍操作使得更容易用自動方式實現。但是,想要讓使用者滿意,這些功能必須能夠順暢地執行,至少要與人類駕駛員一樣快。本文將介紹德國MdynamiX及其合作伙伴聯合實現的適用于實驗室開發的實車在環(ViL)方法,以支持自動駕駛功能一致性開發和評估。 ViL方法的應用
ViL方法的應用
無論是部分自動化,還是全自動化,泊車功能自動化水平不斷增加。盡管泊車時車速不高,但是測試自動泊車功能復雜且高成本,因為泊車場景種類眾多。為了確保所有交通參與者的安全,不同車輛、不同環境、不同情況下的泊車,比如倒車入庫、側方停車,帶來了諸多挑戰。如果想要測試所有這些場景,測試將很復雜。比如兒童出現在視野盲區的測試場景,很難正常進行實際測試。
出于這些原因,有必要通過虛擬場景找到合適的解決方案,在所有開發階段,以合理的經濟成本,驗證和評估相關功能。
實車在環(ViL)方法提供了可行的方案。ViL方法結合了實車測試和計算機仿真的優勢。真實車輛的運動(被測車輛),包括所有子組件,被傳輸到仿真中,使得在虛擬世界中的被測車輛的駕駛能夠模擬真實物理世界的駕駛,而不需要參數化復雜的車輛模型。仿真的虛擬環境將注入被測車輛的真實傳感器,使得被測車輛能夠感知并響應虛擬環境。從而全面測試自動泊車控制功能與車輛執行器之間的交互。由于ViL使用虛擬環境,設計場景具有很高的靈活性,利于關鍵安全場景的設計。
 MXeval——KPI評估
MXeval——KPI評估
為了全面比較手動和自動停車操作(部分自動或全自動),需要一種標準化的評估方法——階段模型方法,將停車操作劃分為獨立部分。除了階段模型之外,需要客觀的關鍵性能指標(KPI)進行評估。MdynamiX的MXeval分析軟件正是滿足這樣的要求,不僅能夠用于車輛動力學和自動橫向和縱向引導駕駛功能的評估,而且包含用于自動停車的測試庫。可以確定具體的評價標準和要追求的目標值,并將其納入評價程序。對測量數據的評估以全自動模式高效地進行,根據需求,可以在實車環境中或遠程連接進行。除了評估圖表之外,KPI也是一覽無余。所有評估結果最終都會保存在報告中。整體的評估過程如下圖所示。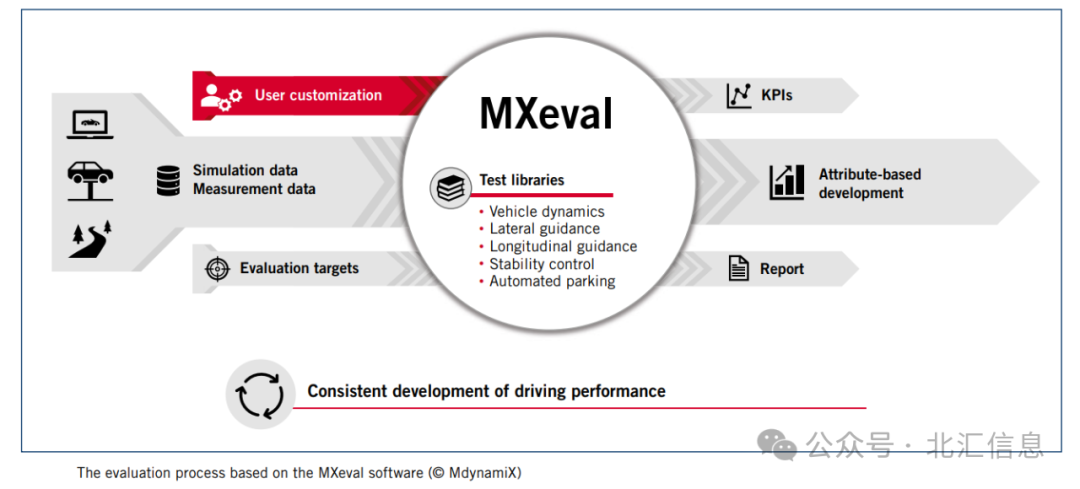 圖3 MXeval軟件評估流程
圖3 MXeval軟件評估流程 結果
結果
本測試中,被測車輛在真實和虛擬環境中都進行操作。在圖4和圖5中,展示了八組測量值的比較,每組測量值都是針對實際的停車位,及其對應的虛擬車位,進行側方停車得到的。圖4顯示,各測量結果表現出一致的趨勢。進一步比較可以看到,測量結果非常相似,尤其是在初始運動時刻,只有細微的差異。例如瞬時車速KPI,在實車和仿真中幾乎相同。
此外,圖4顯示了初始運動后續時刻的速度曲線相似。初始運動的最大速度和瞬時速度都比較相近。真實環境中的平均速度為3.43公里/小時,虛擬環境中為3.49公里/小時。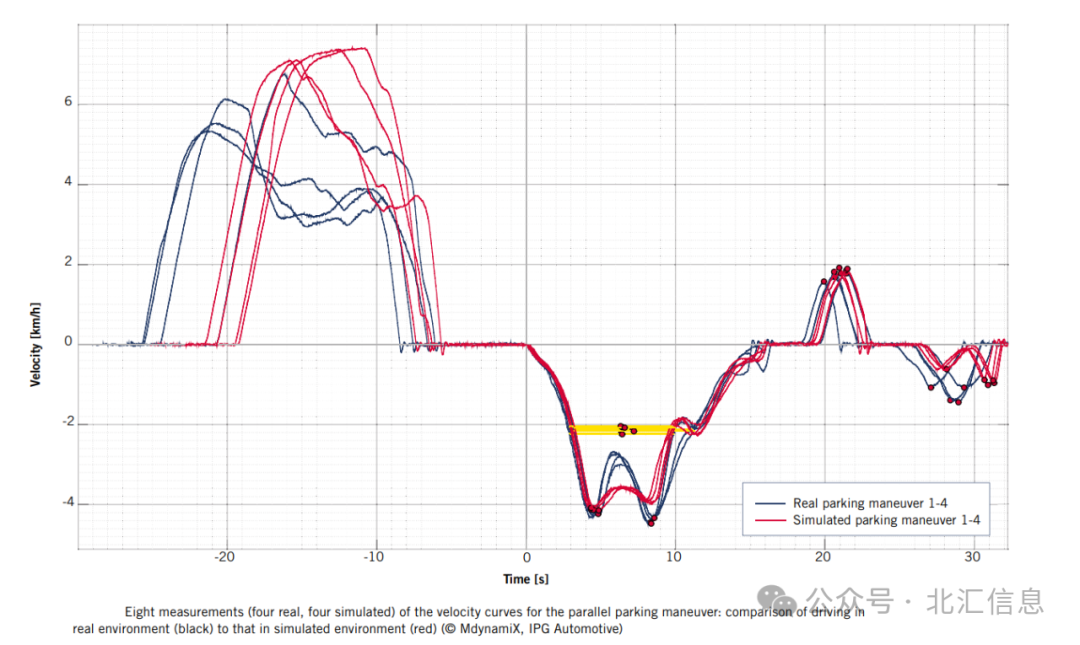 圖4 八組側方停車車速對比
圖4 八組側方停車車速對比
值得注意的是,在真實和虛擬環境,比較整個操縱過程中的方向盤轉角輸入,發現四組測量值,在初始移動(時間點0到16s)中幾乎相同,如圖5所示。然而在16s之后,方向盤轉角輸入出現顯著差異。這些差異可歸因于實車手動轉方向盤沒有轉向機器人——手動轉方向盤的基準差異很大是很常見的。特別是對于停車輔助系統,即使是同一車輛,起始位置起著決定性作用,導致不同停車策略和軌跡。此時,使用轉向機器人可能是有利的。
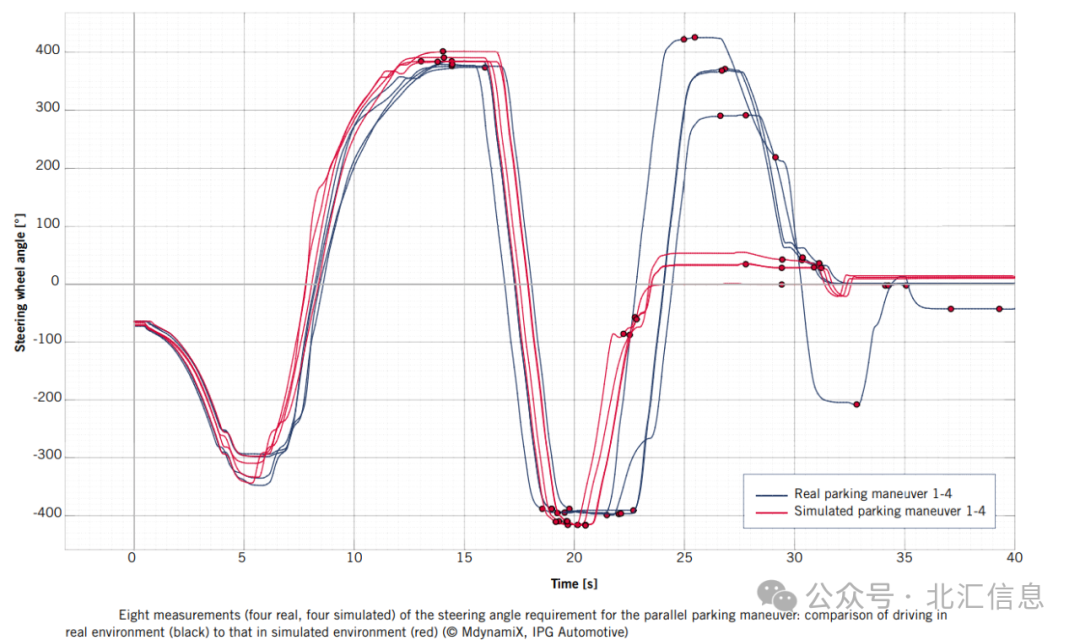 圖5 八組側方停車方向盤轉角輸入對比
圖5 八組側方停車方向盤轉角輸入對比
有多種KPI用于評估停車輔助系統。其中一些是決定性的,尤其是對于初始運動。表1展示了部分KPI。同樣,實車和仿真兩種環境的KPI非常相似是顯而易見的。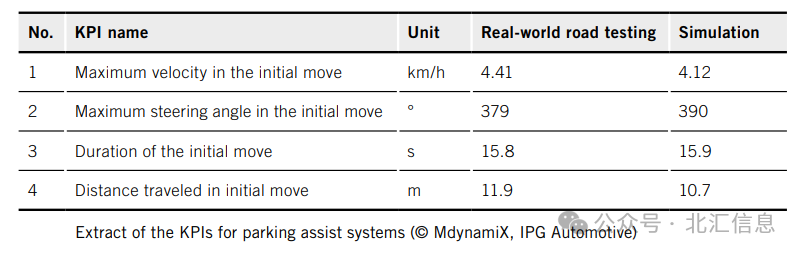 表1 停車輔助系統部分KPI總體而言,ViL方法,不僅是由于法規要求,出于驗證目的仿真愈發重要,而且也為傳統的實車測試提供了有效的補充和/或替代方案。
表1 停車輔助系統部分KPI總體而言,ViL方法,不僅是由于法規要求,出于驗證目的仿真愈發重要,而且也為傳統的實車測試提供了有效的補充和/或替代方案。

總結與展望
本文中MdynamiX及其合作伙伴共同呈現的這一測試方案,可作為大多數自動駕駛功能的基礎,能夠在所有開發階段,評估功能開發的成熟度,驗證功能目標的實現。它能夠有效地比較不同實車和仿真的結果,并驗證仿真質量。此方案使得真實和仿真車輛行為高度一致變為可能。
此外,ViL方法也適用于其他基于傳感器的高級駕駛輔助系統。尤其是在安全相關測試中,例如NCAP測試,ViL方法顯示出巨大的降本潛力。隨著要求變得更加復雜,將出現新的、高風險操作,ViL方法的好處可能更加深遠。
-
自動駕駛
+關注
關注
788文章
14306瀏覽量
170532 -
汽車
+關注
關注
15文章
3850瀏覽量
39511
發布評論請先 登錄
自動駕駛汽車如何確保感知數據的一致性?

新能源車軟件單元測試深度解析:自動駕駛系統視角
堆焊熔池輪廓實時監控,實現工藝穩定性與焊縫一致性
FCB-EV9520L光軸一致性的典范,焦距變換精準如初

一致性測試系統的技術原理和也應用場景
異構計算下緩存一致性的重要性
LMK05318的ITU-T G.8262一致性測試結果

TPS23882B SIFOs IEEE802.3bt 一致性測試報告





 工商網監
工商網監
評論