") 如何設(shè)計(jì)一款四輪智能小車(chē)
如何設(shè)計(jì)一款四輪智能小車(chē)

如何設(shè)計(jì)一款四輪智能小車(chē)
此部分共分為五個(gè)小節(jié),通過(guò)這個(gè) Part 的學(xué)習(xí),我們將了解機(jī)器人的概念和組成,對(duì)機(jī)器人的整體設(shè)計(jì)有一個(gè)明確的思路,然后通過(guò)機(jī)械結(jié)構(gòu)、驅(qū)動(dòng)系統(tǒng)、傳感系統(tǒng)、控制系統(tǒng)四大組成部分,展開(kāi)介紹設(shè)計(jì)一款智能小車(chē)的基本思路。
通過(guò)這一講課程,我們希望大家腦海中能夠?qū)χ悄苄≤?chē)有一個(gè)明確的認(rèn)識(shí)和開(kāi)發(fā)思路,未來(lái)我們?cè)僦饌€(gè)擊破,把它一點(diǎn)一點(diǎn)做出來(lái)。
總體設(shè)計(jì)思路

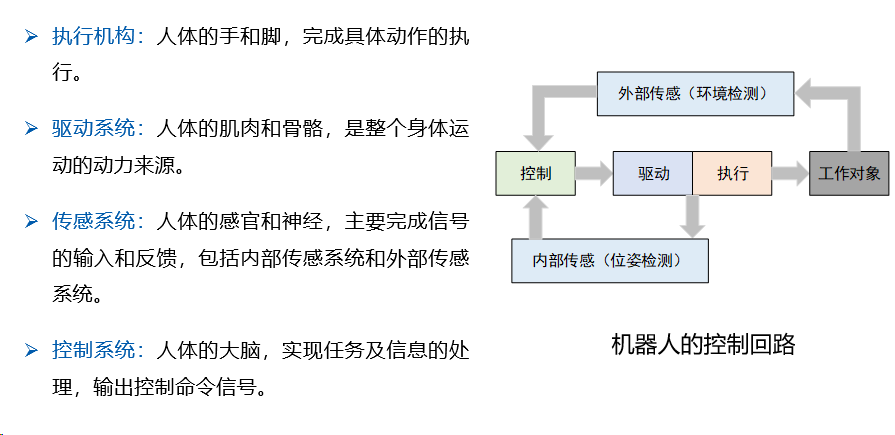
從控制的角度來(lái)講,機(jī)器人可以劃分為圖中四大組成部分,分別是:傳感系統(tǒng)、執(zhí)行機(jī)構(gòu)、驅(qū)動(dòng)系統(tǒng)和控制系統(tǒng)。
先來(lái)看執(zhí)行機(jī)構(gòu),這是機(jī)器人要?jiǎng)悠饋?lái)的重要裝置,比如移動(dòng)機(jī)器人是需要移動(dòng)的,那如何帶動(dòng)輪子旋轉(zhuǎn)或者轉(zhuǎn)彎呢,就是類(lèi)似這樣的電機(jī)、舵機(jī)來(lái)執(zhí)行運(yùn)動(dòng)的。但并不是所有運(yùn)動(dòng)部位都會(huì)安裝電機(jī),比如一輛真實(shí)的汽車(chē),一般只有一個(gè)電機(jī)或者發(fā)動(dòng)機(jī),那如何讓兩個(gè)輪子,甚至四個(gè)輪子都轉(zhuǎn)起來(lái)呢,這就需要一個(gè)完成動(dòng)力分配的傳動(dòng)系統(tǒng),比如轉(zhuǎn)彎的時(shí)候動(dòng)態(tài)調(diào)整左右兩個(gè)輪子的速度,這需要嚴(yán)密的機(jī)械設(shè)計(jì),也就是差速器的功能。除了移動(dòng)機(jī)器人,在一些工業(yè)機(jī)器人中,驅(qū)動(dòng)機(jī)器人的關(guān)節(jié)電機(jī)、抓取物體的吸盤(pán)夾爪,也可以看做是執(zhí)行機(jī)構(gòu)。總之,執(zhí)行機(jī)構(gòu)就是執(zhí)行運(yùn)動(dòng)的一套裝置。
為了讓執(zhí)行機(jī)構(gòu)準(zhǔn)確的執(zhí)行動(dòng)作,還需要在執(zhí)行機(jī)構(gòu)前連接一套驅(qū)動(dòng)系統(tǒng),比如我們要讓機(jī)器人的電機(jī)按照1m/s的速度旋轉(zhuǎn),如何動(dòng)態(tài)的調(diào)整電壓、電流,來(lái)達(dá)到準(zhǔn)確的運(yùn)動(dòng)目的呢,這就是由電機(jī)驅(qū)動(dòng)器來(lái)實(shí)現(xiàn)的。如果是電動(dòng)執(zhí)行機(jī)構(gòu)的話,其配套的驅(qū)動(dòng)系統(tǒng)一般都是由驅(qū)動(dòng)板卡+控制軟件組成,也是嵌入式系統(tǒng)應(yīng)用的重要領(lǐng)域,我們?cè)趯W(xué)校中學(xué)習(xí)的單片機(jī)、PID、數(shù)字電路等概念,都和這個(gè)部分緊密相連。驅(qū)動(dòng)系統(tǒng)的選擇是根據(jù)執(zhí)行機(jī)構(gòu)來(lái)的,比如普通的直流電機(jī),用類(lèi)似這樣的電機(jī)驅(qū)動(dòng)板就行,工業(yè)上常用的伺服電機(jī),都會(huì)用到220V甚者380V電壓,就得用專業(yè)的伺服驅(qū)動(dòng)器了,還有類(lèi)似吸盤(pán)的氣壓驅(qū)動(dòng),外接鍵盤(pán)鼠標(biāo)一樣的外設(shè)驅(qū)動(dòng),以及各種各樣的傳感器驅(qū)動(dòng),總之,驅(qū)動(dòng)系統(tǒng)的職責(zé)就是保證機(jī)器人各種設(shè)備的正常運(yùn)行。
機(jī)器人光動(dòng)是不行的,還需要具備感知能力,這就得靠傳感系統(tǒng)了。傳感系統(tǒng)一般分為內(nèi)部傳感和外部傳感,內(nèi)部傳感是用來(lái)感知機(jī)器人自身狀態(tài)的,比如通過(guò)里程計(jì)計(jì)算自己輪子旋轉(zhuǎn)的速度,從而計(jì)算累積位移,通過(guò)陀螺儀感知機(jī)器人自身的角加速度,判斷轉(zhuǎn)彎時(shí)的狀態(tài),通過(guò)加速度計(jì),感知機(jī)器人在各個(gè)運(yùn)動(dòng)方向上的加速度,可以用來(lái)判斷運(yùn)動(dòng)趨勢(shì)或者上下坡,還有力傳感器,可以用來(lái)感知機(jī)器人自身與外部的相互作用力度,比如抓一個(gè)雞蛋,但又不至于抓破。
與內(nèi)部傳感器相反,外部傳感器幫助機(jī)器人感知外部信息,類(lèi)似人眼一樣,使用攝像頭來(lái)看到外部的彩色圖像,不過(guò)機(jī)器人可以通過(guò)多種外部傳感器超越人類(lèi)的極限,比如可以使用紅外傳感器,在沒(méi)有光線的情況下,也可以看到外部環(huán)境,類(lèi)似夜視儀一樣,還可以利用激光雷達(dá)、聲納、超聲波等距離傳感器,感知在某個(gè)角度范圍內(nèi)的障礙物距離,還有麥克風(fēng)和喇叭,方便我們與機(jī)器人語(yǔ)音交流。
傳感系統(tǒng)是智能機(jī)器人的重要組成,很多機(jī)器人甚至裝備了幾十上百個(gè)傳感器,感知自身與環(huán)境的各種信息,比如自動(dòng)駕駛汽車(chē)就是如此。
在這些系統(tǒng)的上層,就是機(jī)器人的大腦——控制系統(tǒng)了。控制系統(tǒng)一般也是硬件+軟件組成,硬件大多采用計(jì)算資源豐富的處理器,比如我們常用的筆記本電腦、樹(shù)莓派、英偉達(dá)板卡等;其中運(yùn)行的軟件就是各種豐富的應(yīng)用程序了,比如讓機(jī)器人建立未知環(huán)境的地圖,或者讓機(jī)器人運(yùn)動(dòng)到送餐地點(diǎn),再或者是讓機(jī)器人識(shí)別人臉。
智能機(jī)器人的核心算法體現(xiàn),都是在控制系統(tǒng)中完成,這也是我們未來(lái)做機(jī)器人軟件開(kāi)發(fā)的主要位置。
機(jī)器人實(shí)例

機(jī)械結(jié)構(gòu)設(shè)計(jì)
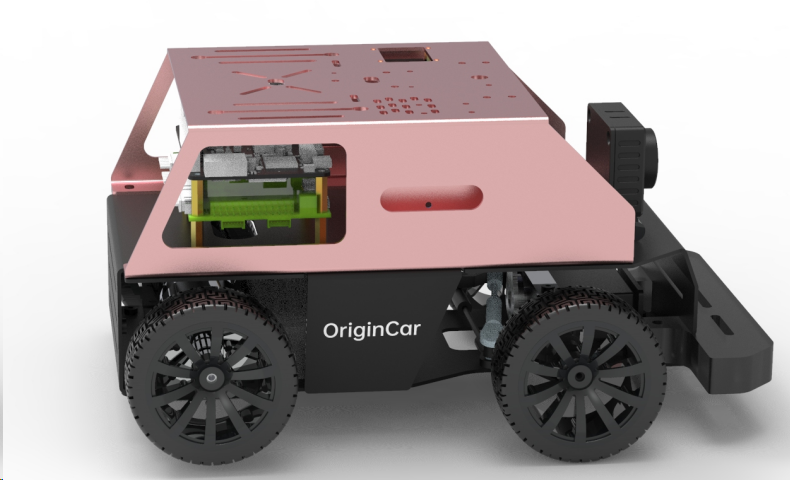
以上述機(jī)器人為例,直觀看上去,似乎這個(gè)小車(chē)并不復(fù)雜。
底盤(pán)是整個(gè)小車(chē)的底座,通過(guò)螺絲安裝了四個(gè)個(gè)車(chē)輪和配套的電機(jī)以及舵機(jī),用來(lái)驅(qū)動(dòng)小車(chē)運(yùn)動(dòng)。
底盤(pán)上第一層是電池,相對(duì)比較重,盡量放在下邊,可以讓小車(chē)的中心靠下,第二層則用來(lái)放置主要的傳感器和控制器板卡,這樣可以很好的隱藏兩層板的疊加同時(shí)讓板卡更加安全。
小車(chē)底盤(pán)的前端,為了安裝相機(jī),我們要設(shè)計(jì)一個(gè)安裝的支架,一側(cè)用螺絲固定在底盤(pán)上,另外一側(cè)可以固定相機(jī),最好還可以調(diào)節(jié)相機(jī)可視角度。
第三層則有一個(gè)LED顯示屏以及一些通孔,可以用來(lái)放置一些方便調(diào)試以及需要一定高度的傳感器如雷達(dá)等。
此外在車(chē)體兩側(cè)還放置了RGB燈帶,可以讓小車(chē)看起來(lái)更加炫酷。
這就是智能小車(chē)的機(jī)械結(jié)構(gòu)啦,大家可以根據(jù)自己選擇的各種零部件尺寸。
接下來(lái),我們把焦點(diǎn)放到小車(chē)的執(zhí)行結(jié)構(gòu)上,也就是這兩個(gè)電機(jī)和四個(gè)輪子,它們?nèi)绾慰刂菩≤?chē)運(yùn)動(dòng)呢?
其實(shí)對(duì)于智能小車(chē)而言,常見(jiàn)的有三種形態(tài)運(yùn)動(dòng)方式,接下來(lái)一一介紹。
審核編輯 黃宇
-
智能小車(chē)
+關(guān)注
關(guān)注
87文章
554瀏覽量
82323 -
智能機(jī)器人
+關(guān)注
關(guān)注
17文章
899瀏覽量
84420
發(fā)布評(píng)論請(qǐng)先 登錄
【硬核項(xiàng)目】STM32F103 智能小車(chē)全棧開(kāi)發(fā):紅外循跡 / 避障算法 + WiFi 遠(yuǎn)程控制,附原理圖與代碼
【零基礎(chǔ)逆襲軟硬件工程師】華清遠(yuǎn)見(jiàn)STM32F103智能小車(chē)開(kāi)發(fā)實(shí)戰(zhàn),手把手帶你從硬件組裝到WiFi遠(yuǎn)程控制,解鎖

純小白,尋找一款一直會(huì)發(fā)射信號(hào)的藍(lán)牙
百度智能云四款大模型應(yīng)用接入DeepSeek
這么全的AGV小車(chē)有配件 趕快收藏

如果設(shè)計(jì)一款桌面款的機(jī)器玩具,最吸引人的外觀與功能要有哪些?
自適應(yīng)藍(lán)牙控制智能小車(chē)
?介紹一款Java開(kāi)發(fā)的開(kāi)源MES系統(tǒng)
一款電容型、非接觸式感知的智能水浸模組-WS11

20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車(chē)競(jìng)賽 電磁桿原理圖 電磁循跡小車(chē) STM32電磁小車(chē) 電磁循跡算法

ADS58C48一款四通道11位模數(shù)轉(zhuǎn)換器數(shù)據(jù)表

DAC7654一款16位、四路電壓輸出數(shù)模轉(zhuǎn)換器(DAC)數(shù)據(jù)表
DAC7634一款16位、四路電壓輸出數(shù)模轉(zhuǎn)換器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論