 智行者聯合清華完成國內首套全棧式端到端自動駕駛系統的開放道路測試
智行者聯合清華完成國內首套全棧式端到端自動駕駛系統的開放道路測試
近日,智行者與清華大學車輛學院李克強院士、李升波教授領導的研究團隊,完成了國內首套全棧式端到端自動駕駛系統的開放道路測試。依托車路云一體化智能網聯駕駛架構,該團隊研發的端到端自動駕駛系統涵蓋了“感知-預測-決策-規劃-控制”等全鏈路環節,從今年1月份率先啟動了城市工況的開放道路驗證,經過近4個月的內部測試,完成了各項性能的綜合評估。這一工作為L3級及以上高級別自動駕駛系統的落地應用奠定了堅實的基礎。
系統開發中,智行者主要貢獻在于感知模型的構建與預訓練,并與清華大學等單位共同完成了實車平臺的搭建與開放道路測試。
目前,處于L1、L2級智能駕駛系統主要依賴“模塊分解”的設計思路,盡管部分模塊(如感知、預測等)已經初步神經網絡化,但是決策、規劃、控制等模塊仍然嚴重依賴人工規則和在線優化,缺乏利用數據進行閉環迭代的能力,這導致行車過程的智能性仍然不足。同時,模塊間不可避免地存在較大信息損失,且各模塊的優化目標存在一定沖突,不利于自動駕駛過程的綜合性能提升。
與之相比,以全模塊神經網絡化為特征的“端到端”自動駕駛系統,因模塊與模塊之間的信息傳遞可依賴高維度特征向量,且神經網絡具有充分的訓練自由度,最大程度地減少了傳感器到執行器之間的信息損失,使得全棧模塊具備利用數據閉環進行快速更新的能力,這為高級別自動駕駛的智能性提升提供一條全新的技術路徑。
面向這一技術發展趨勢,清華大學與智行者團隊自2018年開始瞄準端到端自動駕駛領域進行深耕,重點突破決策、規劃與控制領域的神經網絡設計與訓練難題。團隊先后提出了面向高級別自動駕駛的集成式決控(IDC)開發框架,研發了綜合性能國際領先的數據驅動強化學習算法(DSAC),首創了時空分離的交通參與者行為預測模型(SEPT),設計了具有動作平滑特性的控制型神經網絡架構(LipsNet),開發了自主知識產權的最優控制策略近似求解器(GOPS),以螞蟻搬家的精神逐一解決了端到端自動駕駛面臨的一系列核心難題。
以此為基礎,今年年初清華大學與智行者團隊成功研制了首個從傳感器原始數據到執行器控制指令的全棧神經網絡化自動駕駛系統,并率先完成了城市工況開放道路的實車測試驗證。
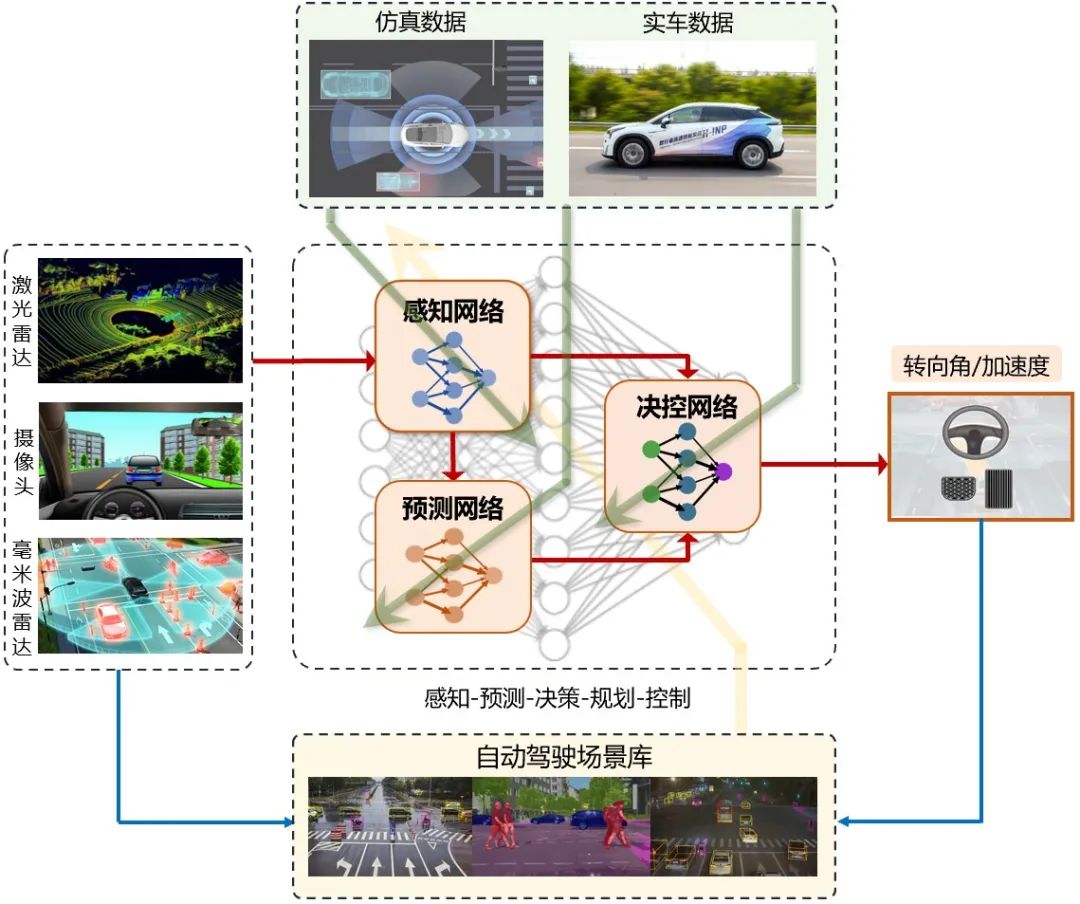
從感知到控制的全鏈路端到端自動駕駛系統原理圖
清華大學與智行者在這一研究工作中,形成了校企之間緊密配合、通力協作的聯合攻關團隊,共同完成了系統功能集成、性能評估迭代等后期任務。本研究獲得國家“十四五”重點研發計劃、國家自然科學基金以及清華大學自主科研計劃支持。
-
傳感器
+關注
關注
2564文章
52739瀏覽量
764975 -
自動駕駛
+關注
關注
788文章
14253瀏覽量
170044 -
智能網聯
+關注
關注
4文章
621瀏覽量
23606 -
智行者科技
+關注
關注
0文章
41瀏覽量
1205
原文標題:智行者聯合清華大學等單位完成國內首套端到端自動駕駛系統的開放道路測試
文章出處:【微信號:idriverplus,微信公眾號:智行者科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

端到端數據標注方案在自動駕駛領域的應用優勢

自動駕駛中基于規則的決策和端到端大模型有何區別?

東風汽車推出端到端自動駕駛開源數據集
技術分享 |多模態自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

動量感知規劃的端到端自動駕駛框架MomAD解析









 工商網監
工商網監
評論