 【GD32F470紫藤派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗
【GD32F470紫藤派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗

8.1實驗內容
通過本實驗主要學習以下內容:
8.2實驗原理
8.2.1ADC原理
我們知道,自然界中有非常多的模擬信號,比如光照強度,還有其他的例如溫度、聲音等等,那么人們是怎么來衡量一個模擬信號的呢?
我們通常會說今天光照度達到了3萬Lux(照度單位),現在測量到的體溫是36.5℃,我們所處的環境是40分貝,沒錯,人們就是通過將這些模擬信號數字化,從而達到衡量這些模擬信號的目的。那對于MCU來說,如果要測量一個模擬量,可以通過自帶的ADC(Analog-to-Digital converters)模塊,即模-數轉換器將模擬量轉化為可以被MCU讀取到的數字量。
8.2.2GD32F470 ADC工作原理
GD32F470有3個12位逐次逼近型ADC(SAR ADC),這三個ADC可以獨立工作,也可以工作在同步模式下。有最多24個外部ADC引腳可用于將連接到這些引腳的電壓值轉換為數字量,這些引腳號可以通過Datasheet獲得。
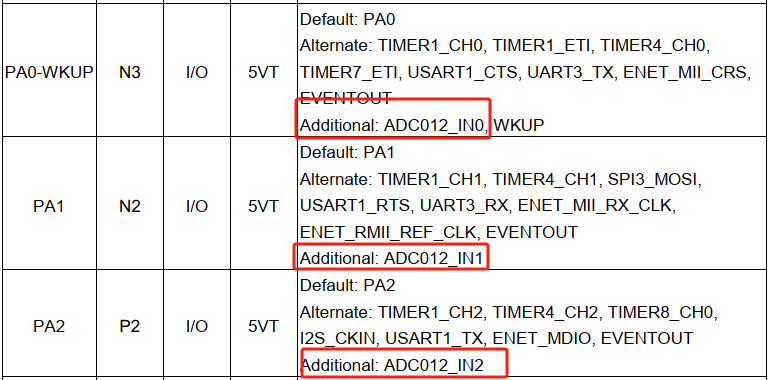
表中ADC012_INx的意思是:該IO口可以作為通道x用于ADC0、ADC1和ADC2。如ADC012_IN0,表示PA0可以用于ADC0的通道0使用,也可以作為ADC1和ADC2的通道0使用。但要注意:不能在同一個時刻讓不同的ADC去轉換同一個通道,否則會有無法預料的結果 |
以下總結了GD32F470 ADC的特性:
- 高性能:
– ADC采樣分辨率:12位、10位、8位、或者6位分辨率;
– ADC采樣率:12位分辨率為2.6 MSPs,10位分辨率為3.0 MSPs。分辨率越低,轉換越快;
–自校準時間:131個ADC時鐘周期;
–可編程采樣時間;
–數據存儲模式:最高有效位對齊和最低有效位對齊;
– DMA請求。
- 模擬輸入通道:
– 16個外部模擬輸入通道;
– 1個內部溫度傳感通道(VSENSE);
– 1個內部參考電壓輸入通道(VREFINT);
– 1個外部監測電池VBAT供電引腳輸入通道。
- 轉換開始的發起:
–軟件觸發;
–硬件觸發。
- 運行模式:
–轉換單個通道,或者掃描一序列的通道;
–單次運行模式,每次觸發轉換一次選擇的輸入通道;
–連續運行模式,連續轉換所選擇的輸入通道;
–間斷運行模式;
–同步模式(適用于具有兩個或多個ADC的設備)。
- 轉換結果閾值監測器功能: 模擬看門狗。
- 中斷產生:
–常規轉換結束;
–模擬看門狗事件;
–溢出事件。
- 過采樣:
– 16位的數據寄存器;
–可調整的過采樣率,從2x到256x;
–高達8位的可編程數據移位。
- ADC供電要求:
– 2.4V到3.6V,一般供電電壓為3.3V。 - ADC輸入范圍:VREFN ≤VIN ≤VREFP 。
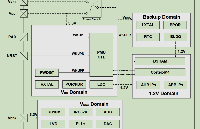
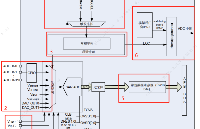
下面介紹下GD32F470的ADC框圖:
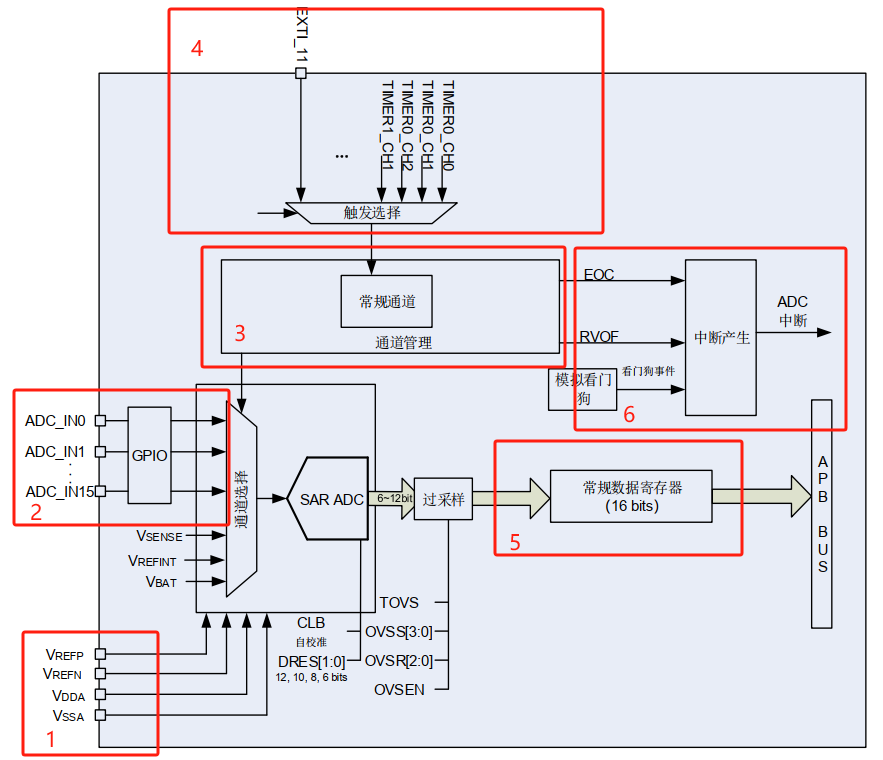
標注1:輸入電壓和參考電壓
輸入電壓引腳定義如下表:
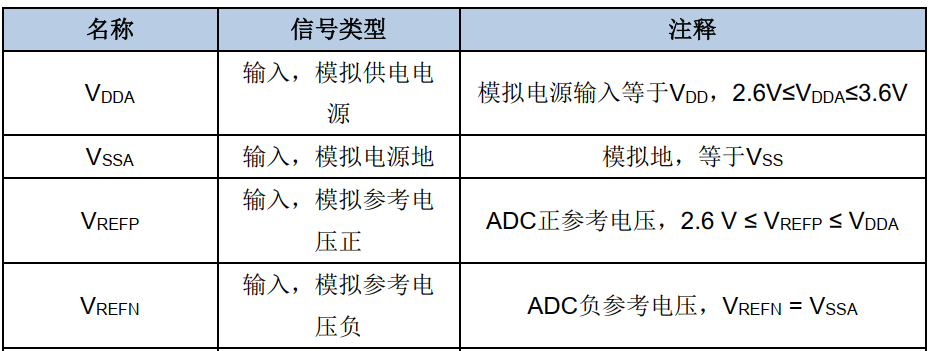
大于等于100pin的GD32F470,ADC參考電壓等于VREFP,100pin以下的GD32F470,ADC參考電壓等于VDDA |
GD32F470的ADC是12bit有效位的,滿量程對應的轉換值是4095,即當采樣引腳上的電壓等于ADC參考電壓時,得到的轉換值即為4095。故理論采樣是指可通過以下公式得到:

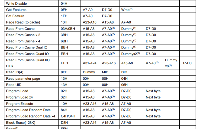
標注2:輸入通道
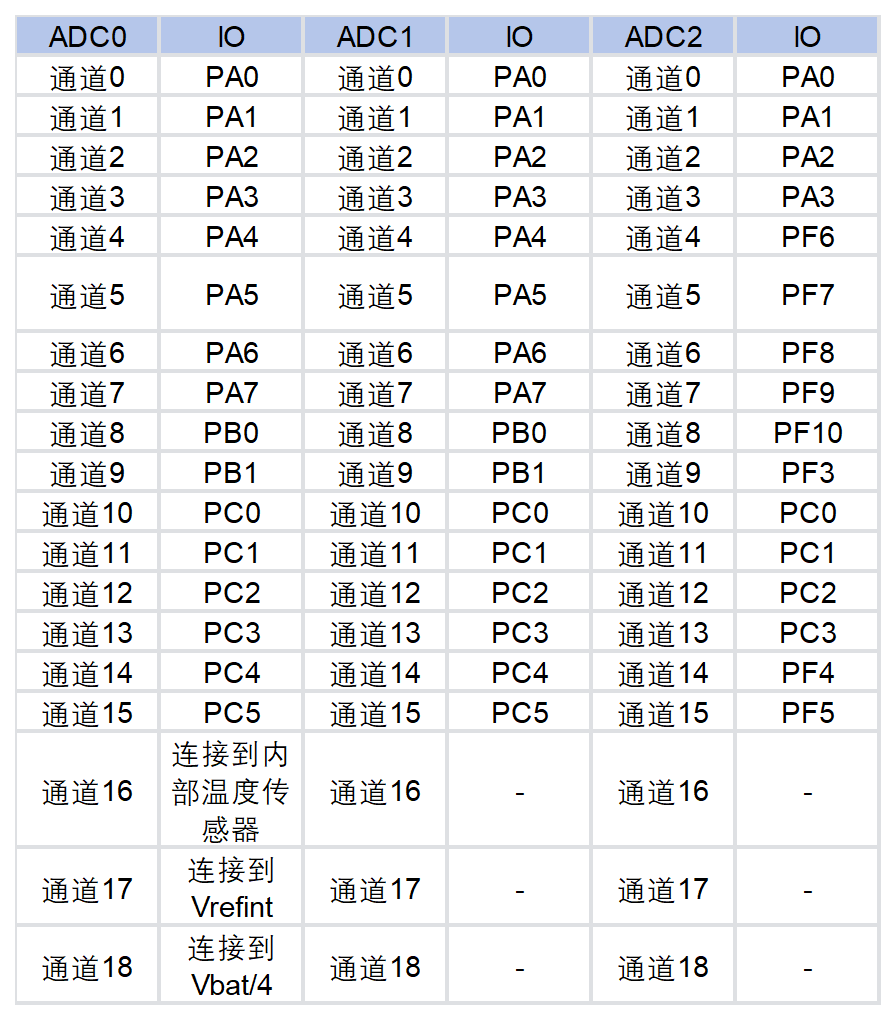
前面提到,ADC有最多16個外部模擬通道和3個內部通道,外部通道號從IN0~IN15,由IO口號來決定,兩個內部通道是IN16(溫度傳感器)和IN17(內部Vrefint,典型值1.2V),下表給出了IO口號對應的ADC通道:
標注3:規則組
GD32F470的ADC轉換組稱為規則組,也叫常規序列。
規則組有兩個重要的參數,其一為轉換的個數,其二為轉換的序列,規定好這兩個參數后,一旦開始規則組的轉換,則ADC就按照轉換序列一個一個的進行模-數轉換,直到達到要求的轉換個數。
規則組的轉換個數由ADC_RSQ0寄存器的RL[3:0]位規定,轉換的總數目為RL[3:0]+1,轉換總數目最大為16個;轉換序列由ADC_RSQ0~ADC_RSQ2共同決定,我們來看下這幾個寄存器。
ADC_RSQ0寄存器:

ADC_RSQ1寄存器:

ADC_RSQ2寄存器:

舉個例子,現需要按照CH3->CH2->CH1的順序進行規則組轉換,則設定RL[3:0] = 2,然后設定RSQ0為CH3,RSQ1為CH2,RSQ2為CH1,則當開始規則組轉換時,ADC首先進行RSQ0規定的通道即CH3的轉換,再進行RSQ1規定的通道即CH2的轉換,最后進行RSQ2規定的通道即CH1轉換,當這三個通道轉換完后,規則組轉換結束。
需要注意的是,每轉換一個規則組通道,轉換結果都會放在寄存器ADC_RDATA中,所以CPU一定要在下一個通道轉換完成前將上一個通道轉換結果讀走,否則會導致上一個通道數據被新的數據覆蓋。所以在多通道規則組轉換時,為了保證能讀到所有通道的數據,一定要使用DMA(直接存儲器訪問控制器),每個通道轉換結束后,都會給DMA發送請求,DMA就會將最新的ADC_RDATA中的數據搬走。關于ADC配合DMA的使用,后面會詳細介紹。
標注4:觸發源
ADC的規則組需要選特定的觸發源用于觸發ADC轉換,注意,ADC的Enable(即ADC_CTL1寄存器的ADC_ON位置“1”)不會觸發ADC轉換,而是當選定的觸發源來臨后ADC才開始轉換。
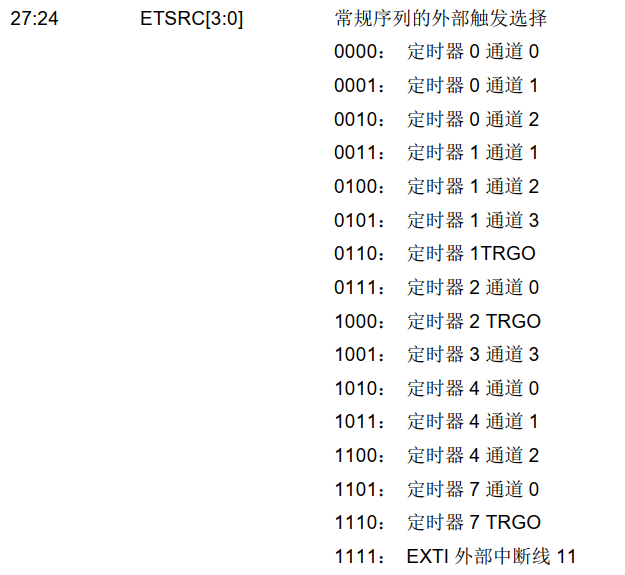
觸發源分為內部觸發和外部觸發,內部觸發是指軟件觸發;外部觸發源是除了內部觸發源以外的觸發源,外部觸發源可以通過ADC_CTL1寄存器查看:
ADC_CTL1寄存器:

標注5:規則組數據寄存器
如標注3規則組的表述,每個ADC的規則組只有一個數據寄存器ADC_RDATA,每轉換一個通道,轉換結果放在這個寄存器中,在下一通道轉換結束前必須要將上一個通道的轉換結果取走。
標注6:ADC中斷及標志位
ADC的中斷總共有兩種:規則組轉換結束中斷以及模擬看門狗,可以通過將ADC_CTL0中的EOCIE和WDEIE置“1”來開啟相應中斷。
ADC_STAT寄存器中的EOC和WDE表示相應事件發生,EOC置“1”表示規則組的轉換已經結束。
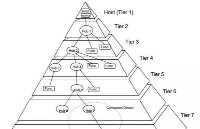
8.2.3DMA原理
本實驗中ADC通道有兩個,分別為PF7和PF10,所以我們用規則組多通道采樣實現雙電壓讀取,從上一節內容中可以知道,ADC規則組實現多通道轉換時,必須要用到DMA。下面我們介紹下DMA原理。
DMA(直接存儲器訪問控制器)是一個非常好用的外設,它提供了一種硬件的方式在外設和存儲器之間或者存儲器和存儲器之間傳輸數據,而無需CPU的介入,從而使CPU可以專注在處理其他系統功能上。GD32F470有兩個DMA,其中DMA0有8個通道,DMA1也有8個通道。
GD32F470支持DMA的單一傳輸和多數據傳輸模式。這里只講解單一傳輸。DMA實現很簡單,只要配置好以下幾要素即可。
- 源地址和目標地址:DMA進行數據搬運過程為從源地址讀取到數據,再搬運到目標地址。本實驗中,需要把ADC轉換結果搬運到自定義的buffer中,所以源地址就要設置為ADCx_RDATA寄存器地址,目標地址為buffer地址。
- 源和目標的地址增量方式:地址增量方式有固定模式和增量模式兩種,固定模式是指進行一次DMA搬運后,下次搬運的源地址或目標地址保持不變;增量模式指進行一次DMA搬運后,下次搬運的源地址或目標地址會加1。本實驗中,源地址始終都應該為ADCx_RDATA地址,所以源地址增量方式需要設置為固定模式,而目標地址為自定義buffer,我們需要用buffer[0]存儲x軸數據,buffer[1]存儲y軸數據,所以目標地址增量方式需要設置為增量模式。
- DMA傳輸方向:DMA傳輸方向有三種,分別為外設地址->存儲器地址、存儲器地址->外設地址以及存儲器->存儲器。本實驗中源地址是外設地址,目標地址為自定義buffer地址即存儲器地址,故傳輸方向需設置為外設地址->存儲器地址。
- 源和目標數據位寬:源和目標數據位寬表示每次搬運的數據長度,可以設置為8bit、16bit和32bit。本實驗中ADC的數據只占用ADCx_RDATA寄存器的低半字即16bit,所以源和目標位寬選擇16bit即可。
- DMA傳輸個數和循環模式:傳輸個數表示一輪DMA傳輸可以搬運的次數。循環模式表示當一輪DMA傳輸結束后,是否直接進行下一輪搬運,當開啟循環模式后,當上一輪DMA傳輸結束后,源地址和目標地址會恢復到最開始的狀態。本實驗中,需要轉換2個通道ADC,故DMA傳輸個數設置為2,循環模式開啟。
- DMA通道優先級:DMA的每個通道都有一個軟件優先級,當DMA控制器在同一時間接收到多個外設請求時,仲裁器將根據外設請求的優先級來決定響應哪一個外設請求。優先級包括軟件優先級和硬件優先級,優先級規則如下:
軟件優先級:分為4級,低,中,高和極高。可以通過寄存器DMA_CHxCTL的PRIO位域來配置。
硬件優先級:當通道具有相同的軟件優先級時,編號低的通道優先級高。例:通道0和通道2配置為相同的軟件優先級時,通道0的優先級高于通道2。
上面描述了DMA配置的一些要素,那么DMA是如何被觸發的呢,我們來看下DMA請求映射表:
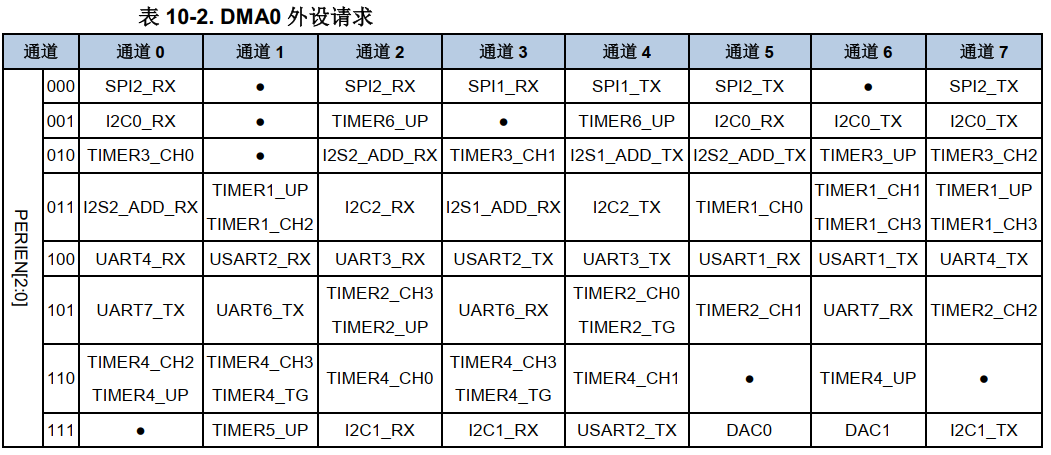
DMA0各通道請求表:
DMA1各通道請求表:
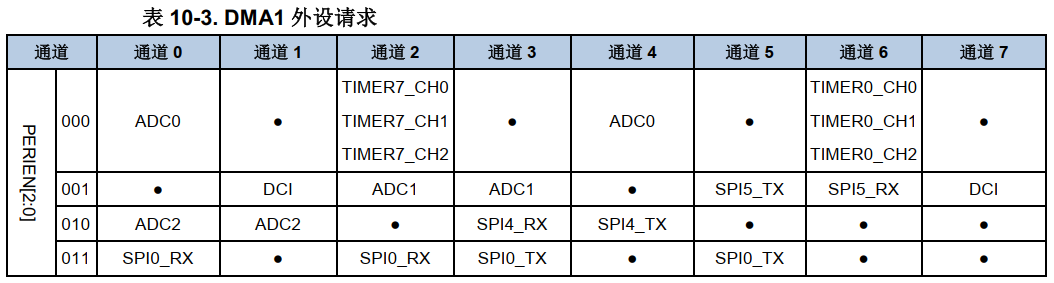
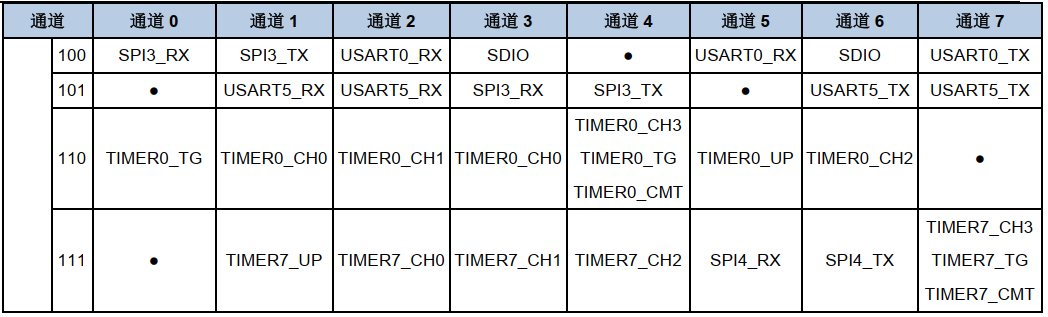
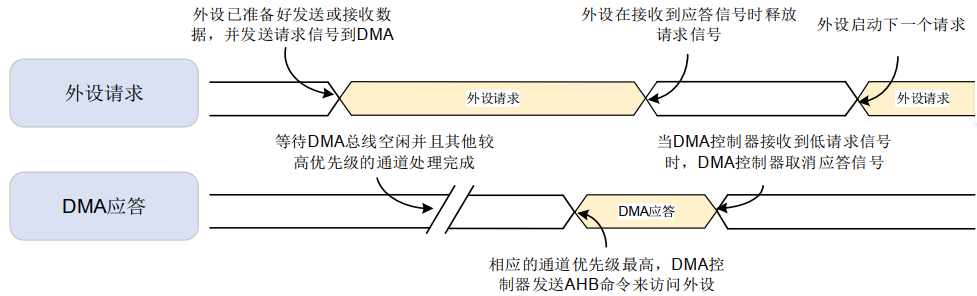
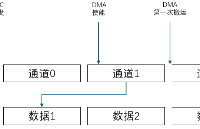
本實驗中是ADC配合DMA來使用,如果使用DMA去搬運ADC0的數據,從上表查詢得知需要使用DMA1的通道0,如果是搬運ADC2的數據,也可以用到DMA1的通道0。如現在設置DMA1的通道0去搬運ADC2的數據,當ADC2每轉換一個通道,ADC2_RDATA會更新一次數據,此時ADC2會自動向DMA1的通道0發出一次搬運請求,DMA收到請求后會進行一次數據搬運。DMA的請求和應答方式見下圖:
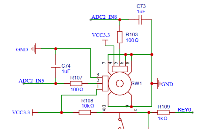
8.3硬件設計
本實驗是使用PF7和PF10來進行電壓采集,讀者可以采用飛線方式外接電壓到這兩個引腳進行測試。
8.4代碼解析
本實驗用到兩個ADC2通道,使用ADC2規則組搭配DMA1通道0進行數據轉換和搬運,ADC2規則組和DMA1通道0都開啟循環模式,一旦開始ADC2規則組轉換,會持續PF7和PF10上的電壓進行轉換和數據搬運。
8.4.1DMA和ADC初始化
在driver_adc.c中定義driver_adc_regular_ch_dma_config函數,該函數實現DMA和ADC的初始化。
| C void driver_adc_regular_ch_dma_config(typdef_adc_ch_general *ADC, typdef_adc_ch_parameter *ADC_CH,void *buffer) { dma_single_data_parameter_struct dma_single_data_parameter; rcu_periph_clock_enable(ADC->dma_parameter.rcu_dma); /*DMA時鐘開啟*/ dma_deinit(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); /*DMA通道參數復位*/ /*DMA源地址、目標地址、增量方式、傳輸位寬、傳輸方向、傳輸個數、優先級設置*/ dma_single_data_parameter.periph_addr = (uint32_t)(&ADC_RDATA(ADC->adc_port)); dma_single_data_parameter.periph_inc = DMA_PERIPH_INCREASE_DISABLE; dma_single_data_parameter.memory0_addr = (uint32_t)(buffer); dma_single_data_parameter.memory_inc = DMA_MEMORY_INCREASE_ENABLE; if(ADC->adc_mode == ADC_DAUL_ROUTINE_PARALLEL) { dma_single_data_parameter.periph_memory_width = DMA_PERIPH_WIDTH_32BIT; } else { dma_single_data_parameter.periph_memory_width = DMA_PERIPH_WIDTH_16BIT; } dma_single_data_parameter.direction = DMA_PERIPH_TO_MEMORY; dma_single_data_parameter.number = ADC->dma_parameter.dma_number; dma_single_data_parameter.priority = ADC->dma_parameter.dma_priority; dma_single_data_mode_init(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel, &dma_single_data_parameter); dma_channel_subperipheral_select(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel,ADC->dma_parameter.dma_subperipheral_num); /*DMA循環模式設置*/ if(ADC->dma_parameter.dma_circulation_mode == ENABLE) { dma_circulation_enable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); } else { dma_circulation_disable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); } dma_channel_enable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); /* 使能DMA */ driver_adc_config(ADC,ADC_CH); /* ADC初始化 */ } |
在driver_adc.h中聲明了ADC DMA的結構體:
| C typedef struct __typdef_adc_dma_parameter { rcu_periph_enum rcu_dma; //DMA時鐘 uint32_t dma_periph; //DMA號 dma_channel_enum dma_channel;//DMA通道號 dma_subperipheral_enum dma_subperipheral_num;//外設請求號 uint32_t dma_number; //DMA傳輸個數 uint32_t dma_priority; //DMA通道優先級 EventStatus dma_circulation_mode;//循環模式 }typdef_adc_dma_parameter; |
這段代碼比較簡單,請讀者按照前面介紹的DMA原理進行解析。
8.4.2BSP_ADC設置所需要的參數及IO口結構體定義
在bsp_adc.c中,對BSP_ADC設置所需要的參數及IO擴結構體數組進行了定義:
| C typdef_adc_ch_general BSP_ADC= { .rcu_adc = RCU_ADC2, /* ADC2的時鐘 */ .adc_psc = ADC_ADCCK_PCLK2_DIV8, /* ADC2設置為APB2 8分頻 */ .adc_port = ADC2, /* ADC口為ADC2 */ .adc_mode = ADC_SYNC_MODE_INDEPENDENT, /* ADC模式為獨立模式 */ .adc_channel_group = ADC_ROUTINE_CHANNEL, /* 使用規則組 */ .adc_scan_function = ENABLE, /* 開啟掃描模式 */ .adc_continuous_function = ENABLE, /* 開啟循環模式 */ .ch_count = 2, /* 轉換長度為2 */ .adc_external_trigger_mode = EXTERNAL_TRIGGER_DISABLE, .dma_parameter = { .rcu_dma = RCU_DMA1, /* DMA1的時鐘 */ .dma_periph = DMA1, /* 使用DMA1 */ .dma_channel = DMA_CH0, /* 使用通道4 */ .dma_number = 2, /* DMA傳輸長度為2 */ .dma_subperipheral_num = DMA_SUBPERI2, .dma_priority = DMA_PRIORITY_HIGH, /* DMA通道優先級 */ .dma_circulation_mode = ENABLE /* DMA循環模式打開 */ }, .trigger_source = ADC_EXTTRIG_ROUTINE_T0_CH0, /* ADC觸發源選擇為軟件觸發 */ .DMA_mode = ENABLE /* 使用DMA */ }; typdef_adc_ch_parameter BSP_ADC_ch[2] = { { .rcu_port = RCU_GPIOF, /* GPIOF時鐘 */ .port = GPIOF, /* GPIO port */ .pin = GPIO_PIN_7, /* PF7 */ .gpio_speed = GPIO_OSPEED_2MHZ, /* PF7速度設置為10MHz */ .adc_channel = ADC_CHANNEL_5, /* PF7是ADC2的通道5 */ .sample_time = ADC_SAMPLETIME_144 /* 設置采樣周期為55.5 */ } , { .rcu_port = RCU_GPIOF, /* GPIOF時鐘 */ .port = GPIOF, /* GPIO port */ .pin = GPIO_PIN_10, /* PF8 */ .gpio_speed = GPIO_OSPEED_2MHZ, /* PF8速度設置為10MHz */ .adc_channel = ADC_CHANNEL_8, /* PF8是ADC2的通道10 */ .sample_time = ADC_SAMPLETIME_144 /* 設置采樣周期為55.5 */ } };/* ADC通道參數配置,包括IO口,和對應通道以及采樣周期 */ |
8.4.3BSP_ ADC初始化和觸發ADC轉換的具體實現函數
在bsp_adc.c中定義了DMA和ADC初始化和觸發ADC轉換的函數:
| C uint16_t BSP_ADC_data[2] ; void bsp_ADC_config() { driver_adc_regular_ch_dma_config(&BSP_ADC,BSP_ADC_ch,(uint16_t*)BSP_ADC_data); driver_adc_software_trigger_enable(&BSP_ADC); } |
8.4.4main函數實現
| C int main(void) { driver_init();//延時函數初始化 bsp_uart_init(&BOARD_UART);//BOARD_UART串口初始化 bsp_ADC_config();//ADC配置 while (1) { delay_ms(100);//延時100ms printf_log(" the BSP_ADC data is %d,%d \r\n", BSP_ADC_data[0],BSP_ADC_data[1]);//打印ADC數據 } } |
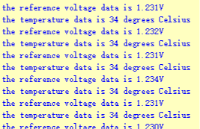
本例程main函數首先進行了延時函數初始化,為了演示實驗結果,這里初始化了BOARD_UART串口,關于串口的使用,請讀者參考串口章節,然后是BSP_ADC配置。在主循環中,每100ms打印一次PF7和PF10的ADC轉換數據。
8.5實驗結果
如上main函數實現說明。
-
開發板
+關注
關注
25文章
5680瀏覽量
104672 -
GD32
+關注
關注
7文章
421瀏覽量
25478
發布評論請先 登錄
【GD32F470紫藤派開發板使用手冊】第九講 USART-printf打印實驗
【GD32F470紫藤派開發板使用手冊】第十一講 SPI-SPI NOR FLASH讀寫實驗
使用GD32F470編譯drv_adc.c時報錯怎么解決?
【GD32H757Z海棠派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗
【GD32F470紫藤派開發板使用手冊】第十三講 USB_虛擬鍵盤實驗
【GD32F303紅楓派開發板使用手冊】第十三講 ADC-內部溫度傳感器和參考電壓采樣實驗
【GD32F303紅楓派開發板使用手冊】第二十講 SPI-SPI NAND FLASH讀寫實驗





 工商網監
工商網監
評論