 EtherCAT運動控制器在UVW對位平臺中的應用
EtherCAT運動控制器在UVW對位平臺中的應用
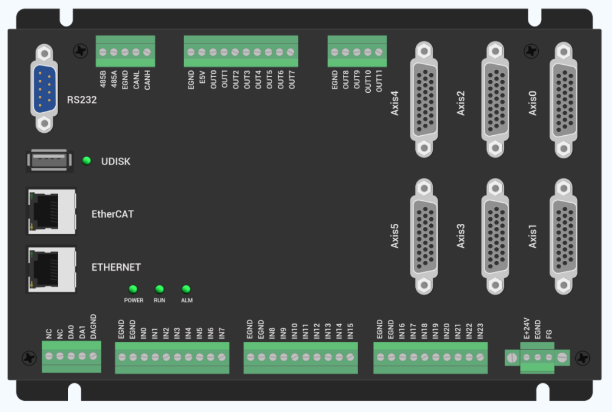
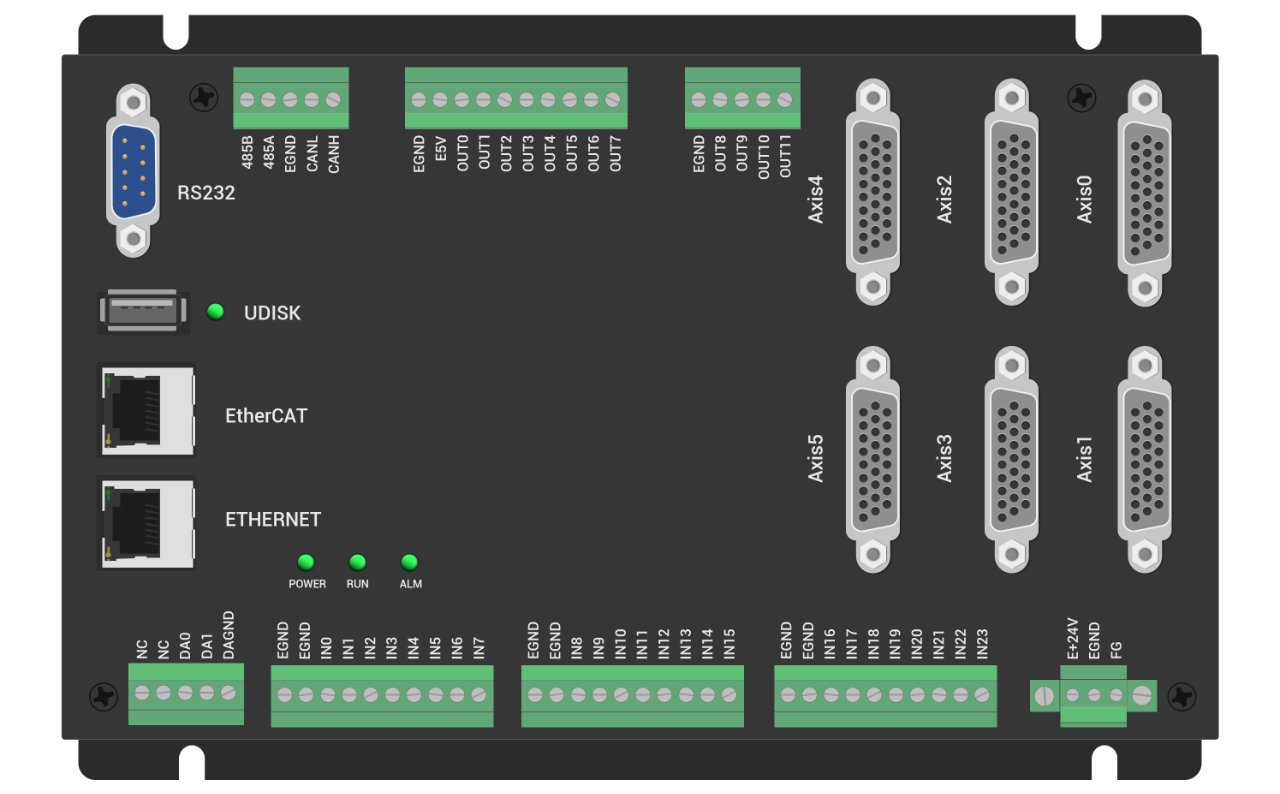
ZMC406硬件介紹
ZMC406是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。
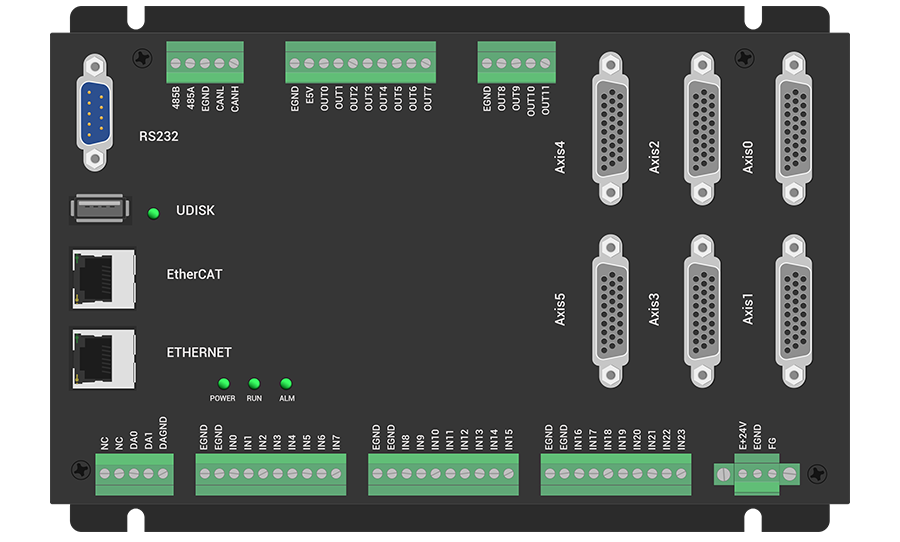
ZMC406支持6軸運動控制,最多可擴展至32軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨等功能。
ZMC406支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
ZMC406支持6軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24路輸入口和12路輸出口,模擬量AD/DA各兩路,EtherCAT最快125us的刷新周期。
此類運動控制器與PCI運動控制卡相比具有如下優點:
(1)不使用插槽,穩定性更好;
(3)控制器直接做接線板使用,節省空間;
(4)控制器上可以并行運行程序,與PC只需要簡單交互,降低PC軟件的復雜性等優勢。
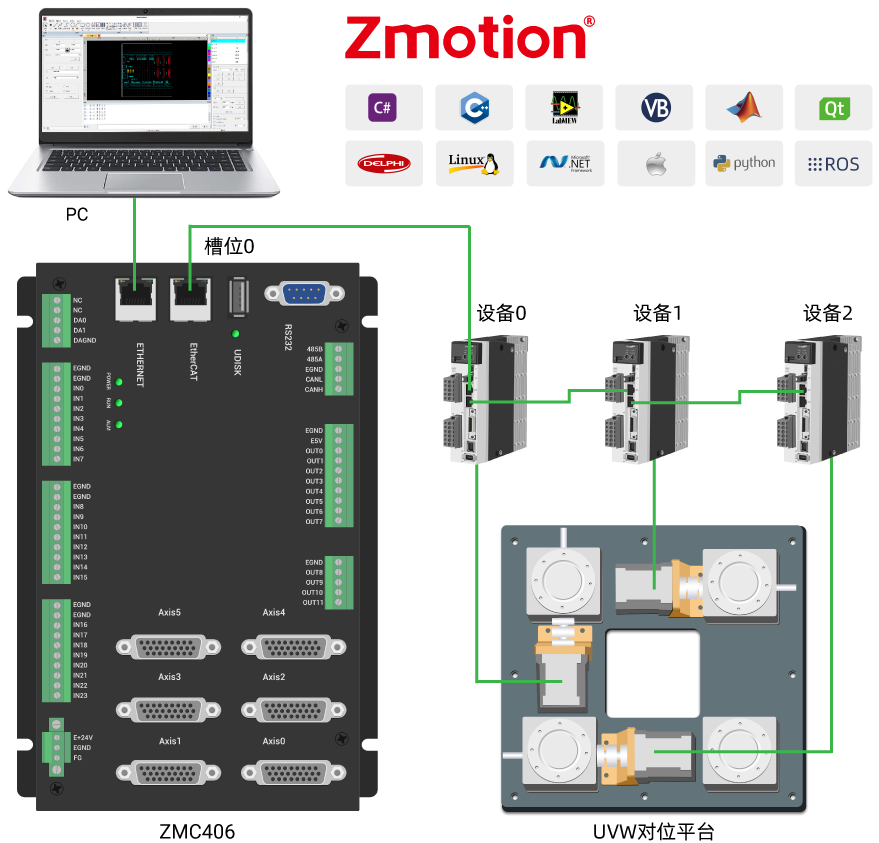
ZMC控制器通過RTSys開發環境來調試,RTSys是一個方便的編程、編譯和調試環境。RTSys可以通過串口、以太網、PCI和LOCAL與控制器建立連接。應用程序可以使用VC,VB,VS,C++Builder,C#等軟件來開發。調試時可以把RTSys軟件同時連接到控制器,程序運行時需要動態庫zmotion.dll。
ZMC4系列控制器支持PPR,PRP結構的3軸UVW平臺,關節軸U+關節軸V+關節軸W。采用脫機的方式將編輯好的程序下載到控制器上(也可以用PC監視或者實時發送指令操作),可利用觸摸屏示教的方式編輯想要運動的軌跡。
??? UVW對位平臺介紹
1、UVW平臺
UVW平臺,也被稱為XXY平臺或XYR對位平臺,是一種高精度移動平臺,專為高精度對位設備而設計。
該平臺屬于三軸并聯運動機構,通過控制三個線性移動軸的并聯運動,可以實現以平面上任意一點為中心進行旋轉運動以及沿任意方向平移。這種設計使得UVW平臺在工業自動化中成為一個核心技術,特別適用于需要高精度對位功能的應用場景。
2、UVW平臺的應用場景與優勢
UVW平臺與視覺CCD糾偏系統對接在一起,可以迅速完成高精度的糾偏工作,其重復定位精度一般可達±1μm。與以前的xyθ平臺相比,UVW平臺在控制精度和靈活性方面都有顯著的優勢。
UVW平臺的控制精度高于xyθ平臺,并且它可以在平面上的任意一點為中心進行旋轉運動,而xyθ平臺的旋轉中心則必須固定在平臺上某處并隨平臺一同運動。
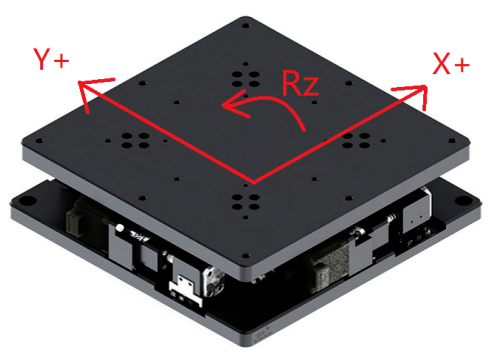
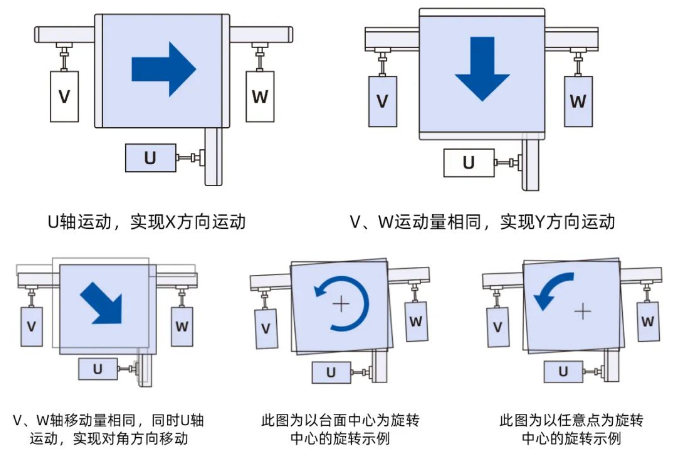
此外,UVW平臺需要一個絕對坐標系作為參考系,而xyθ平臺則使用隨平臺動的坐標系作為參考系。UVW平臺?作模式如下圖:
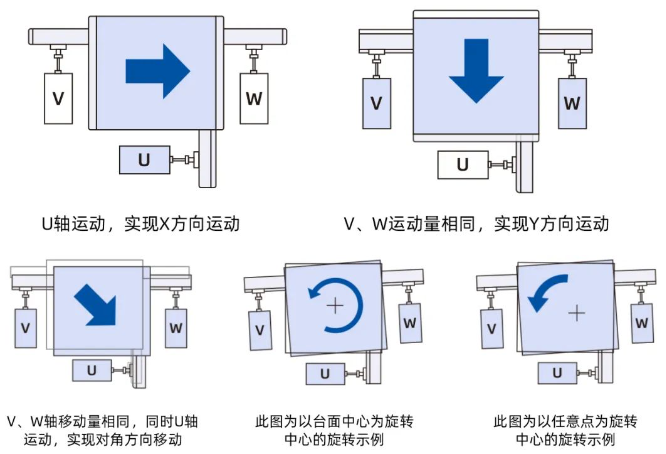
UVW平臺主要應用于曝光機、絲印機、貼合機等PCB及半導體等行業。在這些應用中,UVW平臺通過配合機器視覺系統,實現高精度對位功能,從而提高生產效率和產品質量。總的來說,UVW平臺以其高精度、高靈活性和廣泛的應用領域,成為現代工業自動化中不可或缺的一部分。
3、PPR結構和PRP結構的UVW平臺區別
UVW平臺的PPR和PRP結構區別主要體現在其構型和應用特點上。
首先,從構型上來看,PPR和PRP結構代表了UVW平臺的不同設計方式。這兩種結構都是UVW平臺的常見形式,但它們在具體的機械布局、運動軸的配置以及關節連接方式等方面可能存在差異。這種差異使得PPR和PRP結構在剛度、穩定性以及精度等方面可能表現出不同的性能。
其次,從應用特點上來看,PPR結構的UVW平臺可能更注重于結構的穩定性和精度,適用于對精度要求較高且需要穩定運動的場景。而PRP結構的UVW平臺可能在一些特定的應用場景中具有優勢,比如在一些需要更高靈活性或更復雜運動模式的場合。
??? 正運動UVW機械手模型
正運動技術UVW平臺運動控制算法于UVW有三種常見模型:FRAME33、FRAME34、FRAME37。
分別對應兩種機械結構(PRP、PPR)跟兩個坐標系方向(XYY、XXY),可以實現單軸直線運動、兩軸線性插補、兩軸圓弧插補、空間圓弧等復雜運動。
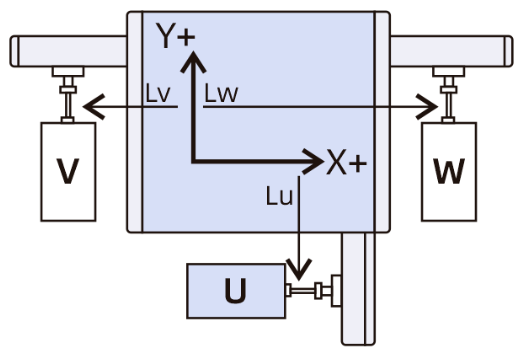
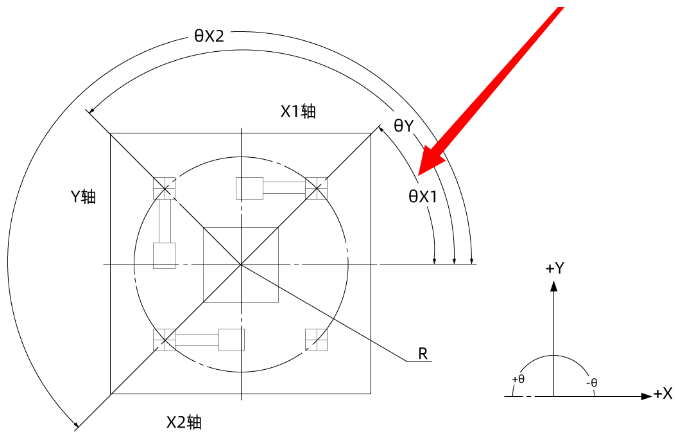
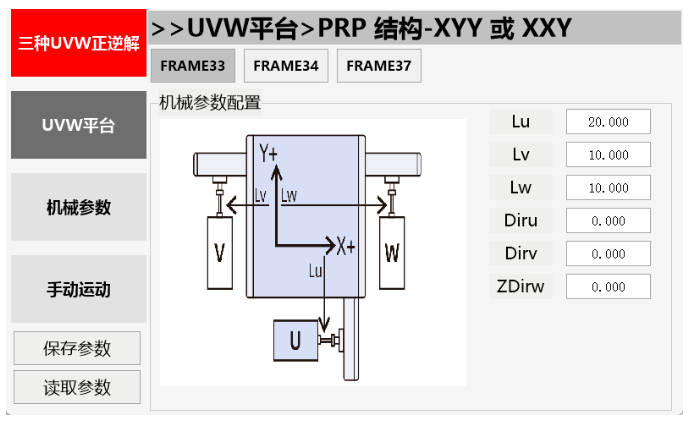
一、FRAME33-UVW對位平臺(PRP結構-XYY或XXY)
原理:通過安裝于同一平面的三個驅動軸的運動,實現定位要求(以下圖示均以平臺回零后的初始位置為基準)。
A、電機方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實際電機軸方向無要求,根據實際情況填寫結構參數即可。
B、TABLE寄存器依次存入機械手結構參數
建立機械手連接時,需要將機械結構參數按照如下次序依次填寫到TABLE數組中。FRAME33模型機械結構參數說明如下。
| TABLE(Tablenum,lu,lv,lw, angleonecircle,dirx,diry1,diry2) | |
| Tablenum | 存儲轉換參數的TABLE位置 |
| lu | U軸的距離參數,填寫正值,零點到U軸的垂直距離 |
| lv | V軸的距離參數,填寫正值,零點到V軸的垂直距離 |
| lw | W軸的距離參數,填寫正值,零點到W軸的垂直距離 |
| angleonecircle | 虛擬旋轉軸一圈脈沖數,任意值 |
| diru | U軸的方向,0-與虛擬X正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬Y正向一致,1反向 |
| zdirw | W軸的方向,0-與虛擬Y正向一致,1反向 |
從TableNum編號開始依次機械手結構參數U軸的距離參數,V軸的距離參數,W軸的距離參數,虛擬旋轉軸一圈脈沖數,U軸的方向,V軸的方向,W軸的方向到Table中。
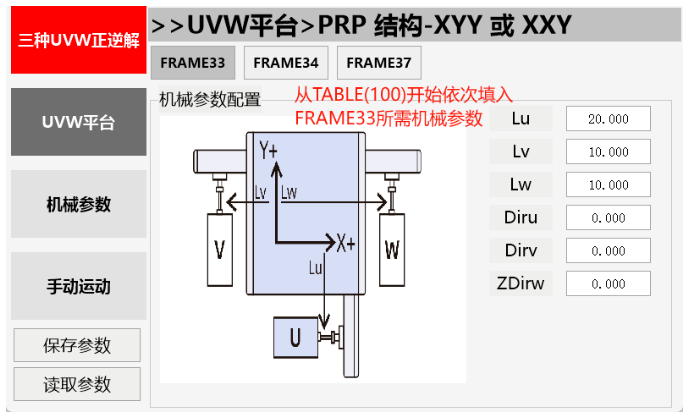
TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw)。例程從TABLE(100)開始依次填入Frame所需機械參數。
C、設置關節軸參數及虛擬軸參數
各軸的軸類型和脈沖當量(units)要設置正確,設置為電機走1mm需要的脈沖數。虛擬軸的units跟實際發送脈沖數無關,用于設置運動精度,虛擬軸的脈沖當量一般設置為1000,表示精度為小數點后3位。


D、確定機械手零點位置
FRAME33需要保證VW軸是水平的。平臺上任意一點可作為零點,保證結構參數正確即可。
E、建立機械手正逆解
正解建立:以FRAME33模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說明可通過Rtsys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機械手正解 CONNREFRAME(33,tablenum, Axis_a,Axis_b,Axis_c)

若機械手正解建立成功,虛擬軸MTYPE(當前運動類型)將顯示為34,此時只能操作關節軸在關節坐標系中調整機械手姿態,手動運動可通過RTSys軟件菜單欄的【工具】-【手動運動】,待【手動運動】界面彈出之后選擇關節軸軸編號(本文關節軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據實際需求選擇點動或者寸動。虛擬軸會自動計算末端工作點位于直角坐標系中的位置。
逆解建立:以Frame33模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNFRAME指令建立正解模式。指令說明可通過Rtsys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機械手逆解 CONNFRAME(33,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若機械手逆解建立成功,關節軸MTYPE(當前運動類型)將顯示為33,【手動運動】界面操作虛擬軸方法同上。此時加工工藝指令只能操作虛擬軸,事先編輯好運動的軌跡在直角坐標系中運動(本文虛擬軸以軸3,軸4,軸5為例),關節軸會自動計算在關節坐標系中如何聯合運動。
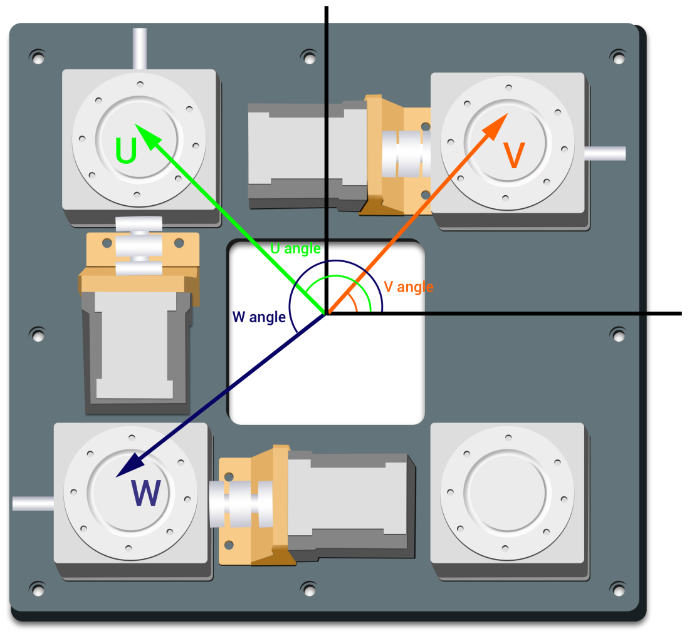
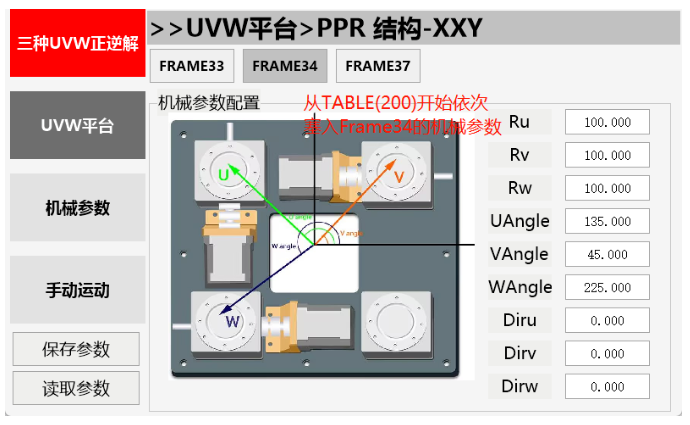
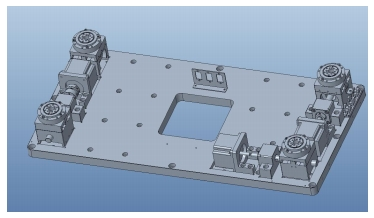
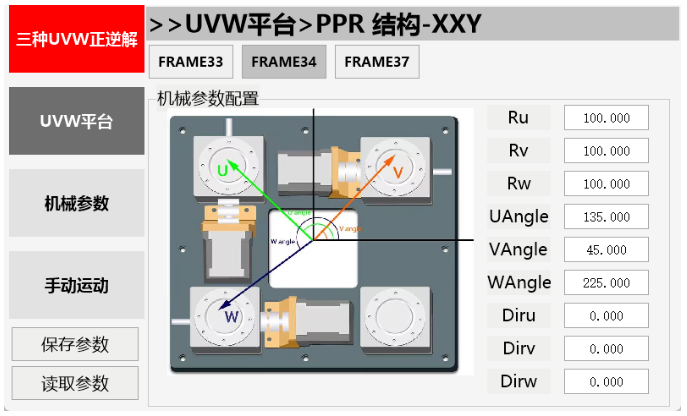
二、FRAME34-UVW對位平臺(PPR結構-XXY)
結構示意圖
A、電機方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實際電機軸方向無要求,根據實際情況填寫結構參數即可。
B、TABLE寄存器依次存入機械手結構參數
建立機械手連接時,需要將機械結構參數按照如下次序依次填寫到TABLE數組中。FRAME34模型機械結構參數說明如下。
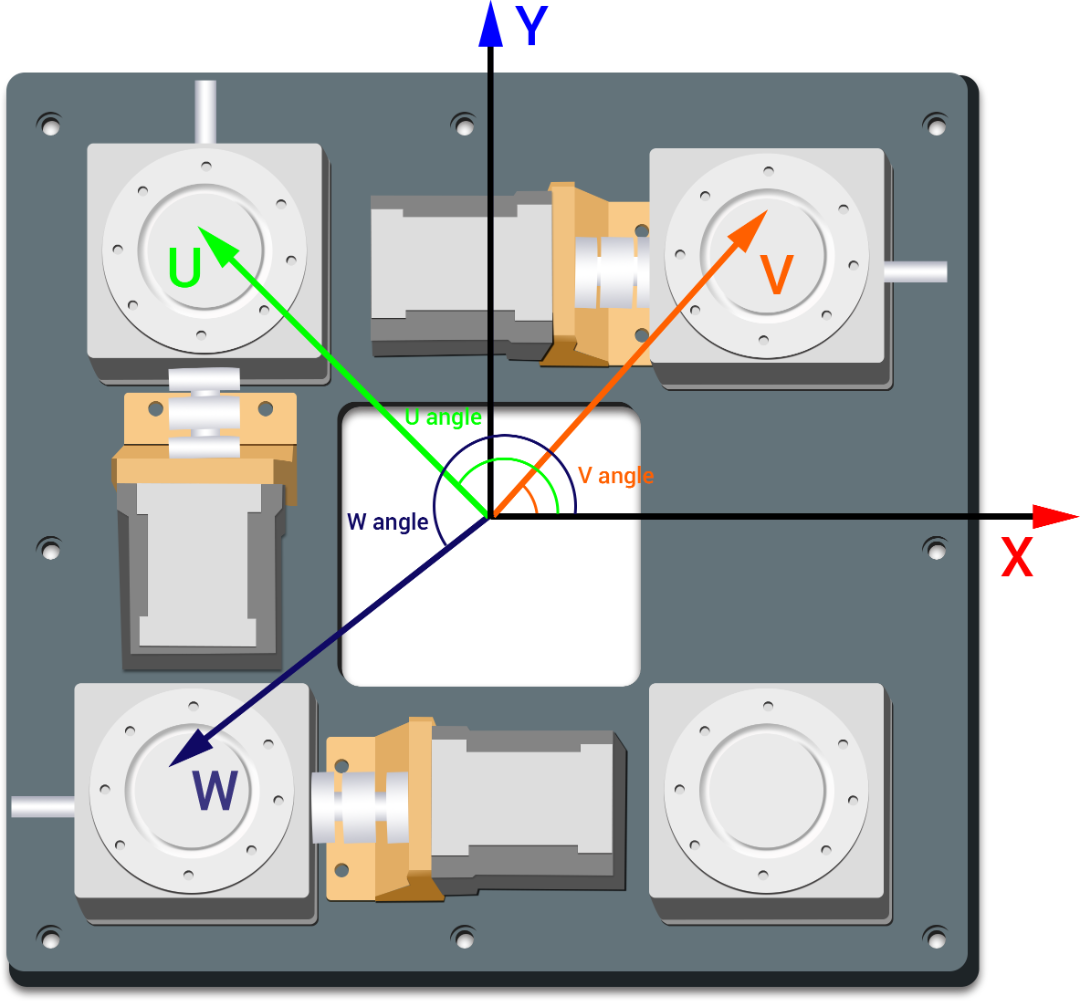
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存儲轉換參數的TABLE位置 |
| Ru | U軸的距離參數,填寫正值,零點到U軸的旋轉中心距離 |
| Rv | V軸的距離參數,填寫正值,零點到V軸的旋轉中心距離 |
| Rw | W軸的距離參數,填寫正值,零點到W軸的旋轉中心距離 |
| Uangle | U軸零點時和x軸角度,單位度 |
| Vangle | V軸零點時和x軸角度,單位度 |
| Wangle | W軸零點時和x軸角度,單位度 |
| angleonecircle | 虛擬旋轉軸一圈脈沖數,任意值 |
| diru | U軸的方向,0-與虛擬Y正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬X正向一致,1反向 |
| dirw | W軸的方向,0-與虛擬X正向一致,1反向 |
從TableNum編號開始依次機械手結構參數U軸的距離參數,V軸的距離參數,W軸的距離參數,U軸零點時和X軸的角度,V軸零點時和X軸的角度,W軸零點時和X軸的角度,虛擬旋轉軸一圈脈沖數,U軸的方向,V軸的方向,W軸的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)
C、設置關節軸參數及虛擬軸參數
各軸的軸類型和脈沖當量(units)要設置正確,設置為電機走1°需要的脈沖數。虛擬軸的units跟實際發送脈沖數無關,用于設置運動精度,虛擬軸的脈沖當量一般設置為1000,表示精度為小數點后3位。
D、確定機械手零點位置
FRAME34保證VW軸是水平的,并平行X軸,U平行Y軸。平臺上任意一點可作為零點,保證結構參數正確即可。
E、建立機械手正逆解
正解建立:以FRAME34模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說明可通過Rtsys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機械手正解 CONNREFRAME(34,tablenum, Axis_a,Axis_b,Axis_c)

若機械手正解建立成功,虛擬軸MTYPE(當前運動類型)將顯示為34,此時只能操作關節軸在關節坐標系中調整機械手姿態,手動運動可通過RTSys軟件菜單欄的【工具】-【手動運動】,待【手動運動】界面彈出之后選擇關節軸軸編號(本文關節軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據實際需求選擇點動或者寸動。虛擬軸會自動計算末端工作點位于直角坐標系中的位置。
逆解建立:以FRAME34模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNFRAME指令建立正解模式。指令說明可通過RTSys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機械手逆解 CONNFRAME(34,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若機械手逆解建立成功,關節軸MTYPE(當前運動類型)將顯示為33,【手動運動】界面操作虛擬軸方法同上。此時加工工藝指令只能操作虛擬軸,事先編輯好運動的軌跡在直角坐標系中運動(本文虛擬軸以軸3,軸4,軸5為例),關節軸會自動計算在關節坐標系中如何聯合運動。
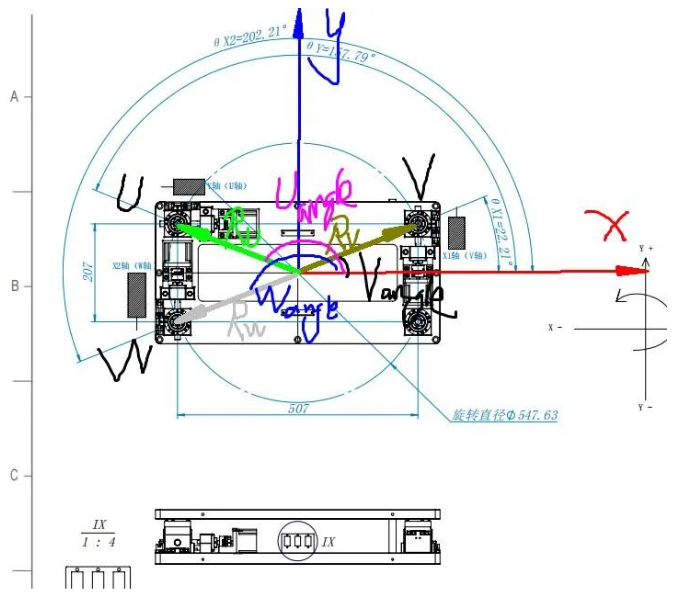
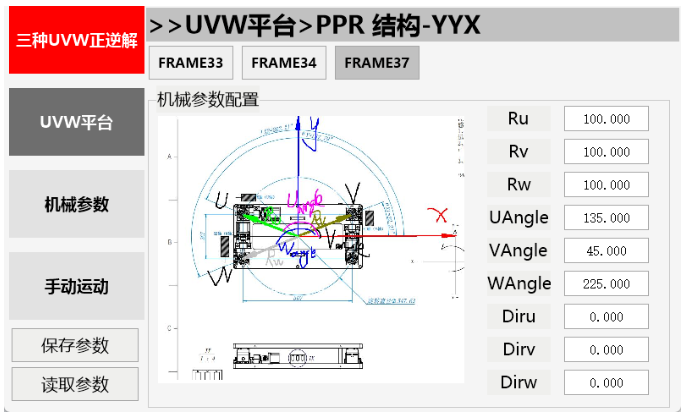
三、FRAME37-UVW對位平臺(PPR結構-YYX)
A、電機方向及角度范圍
虛擬的XY滿足右手法則,角度正向與虛擬XY滿足右手法則,實際電機軸方向無要求,根據實際情況填寫結構參數即可。
B、TABLE寄存器依次存入機械手結構參數
建立機械手連接時,需要將機械結構參數按照如下次序依次填寫到TABLE數組中。FRAME37模型機械結構參數說明如下。
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存儲轉換參數的TABLE位置 |
| Ru | U軸的距離參數,填寫正值,零點到U軸的旋轉中心距離 |
| Rv | V軸的距離參數,填寫正值,零點到V軸的旋轉中心距離 |
| Rw | W軸的距離參數,填寫正值,零點到W軸的旋轉中心距離 |
| Uangle | U軸零點時和x軸角度,單位度 |
| Vangle | V軸零點時和x軸角度,單位度 |
| Wangle | W軸零點時和x軸角度,單位度 |
| angleonecircle | 虛擬旋轉軸一圈脈沖數,任意值 |
| diru | U軸的方向,0-與虛擬Y正向一致,1反向 |
| dirv | V軸的方向,0-與虛擬X正向一致,1反向 |
| dirw | W軸的方向,0-與虛擬X正向一致,1反向 |
從TableNum編號開始依次機械手結構參數U軸的距離參數,V軸的距離參數,W軸的距離參數,U軸零點時和X軸的角度,V軸零點時和X軸的角度,W軸零點時和X軸的角度,虛擬旋轉軸一圈脈沖數,U軸的方向,V軸的方向,W軸的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)。
C、設置關節軸參數及虛擬軸參數
各軸的軸類型和脈沖當量(units)要設置正確,設置為電機走1°需要的脈沖數。虛擬軸的units跟實際發送脈沖數無關,用于設置運動精度,虛擬軸的脈沖當量一般設置為1000,表示精度為小數點后3位。
D、確定機械手零點位置
FRAME37保證VW軸是水平的,并平行X軸,U平行Y軸。平臺上任意一點可作為零點,保證結構參數正確即可。
E、建立機械手正逆解正解建立:
以FRAME37模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNREFRAME指令建立正解模式。指令說明可通過RTSys軟件菜單欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNREFRAME即可查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '選擇軸列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立機械手正解 CONNREFRAME(37,tablenum, Axis_a,Axis_b,Axis_c)

若機械手正解建立成功,虛擬軸MTYPE(當前運動類型)將顯示為34,此時只能操作關節軸在關節坐標系中調整機械手姿態,手動運動可通過RTSys軟件菜單欄的【工具】-【手動運動】,待【手動運動】界面彈出之后選擇關節軸軸編號(本文關節軸以軸0(U軸),軸1(V軸),軸2(W軸))然后根據實際需求選擇點動或者寸動。虛擬軸會自動計算末端工作點位于直角坐標系中的位置。
逆解建立:以FRAME37模型為例。先將機械手結構參數從某個Table起始編號依次存儲到Table數組中,然后選擇對應模型的軸列表,使用CONNFRAME指令建立正解模式。指令說明可通過RTSys軟件工具欄的【常用】-【幫助文檔】-【RTBasic幫助】-【索引】,在查找欄搜索CONNFRAME查看。
'將機械手參數從編號TableNum開始依次存儲到Table數組中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'選擇軸列表 BASE(Axis_a,Axis_b,Axis_c) '建立機械手逆解 CONNFRAME(37,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若機械手逆解建立成功,關節軸MTYPE(當前運動類型)將顯示為33,【手動運動】界面操作虛擬軸方法同上。此時加工工藝指令只能操作虛擬軸,事先編輯好運動的軌跡在直角坐標系中運動(本文虛擬軸以軸3,軸4,軸5為例),關節軸會自動計算在關節坐標系中如何聯合運動。
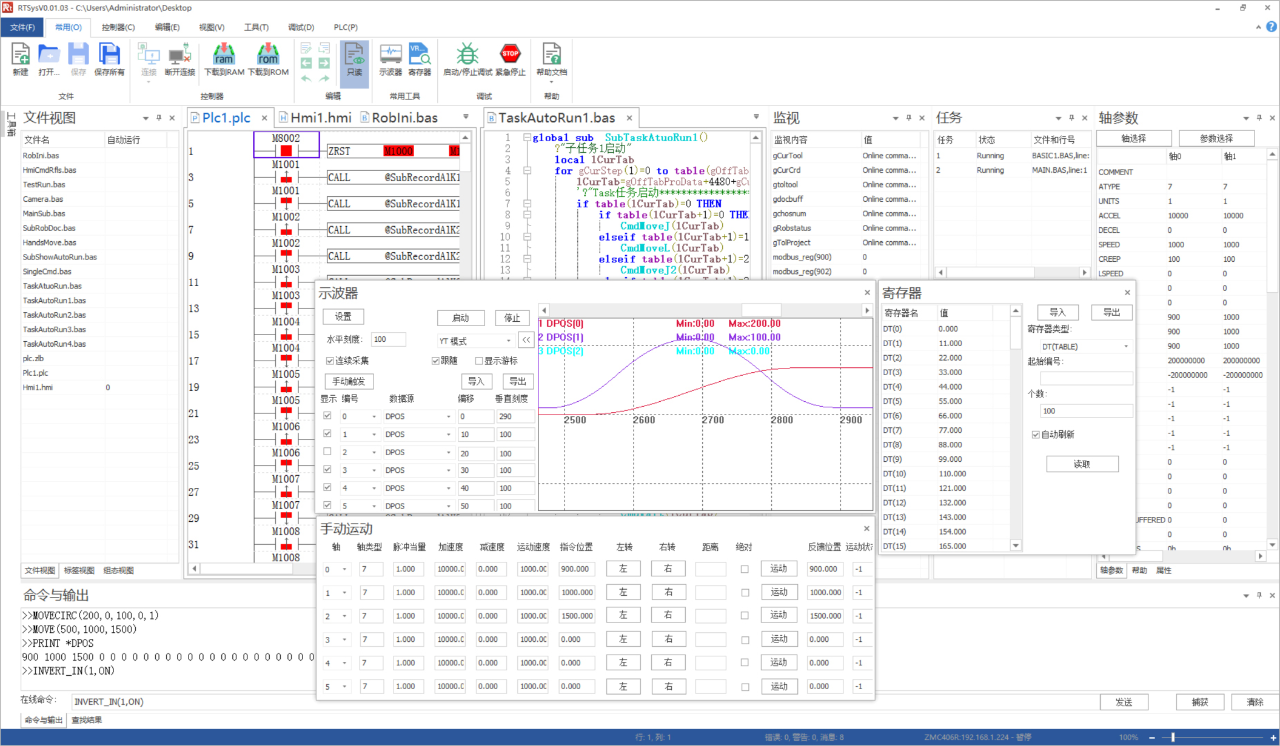
??? 例程演示
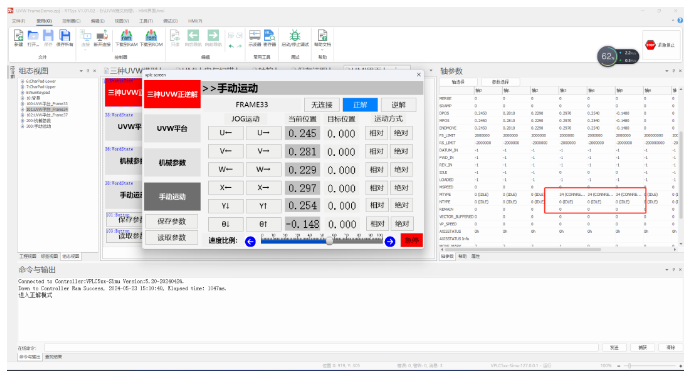
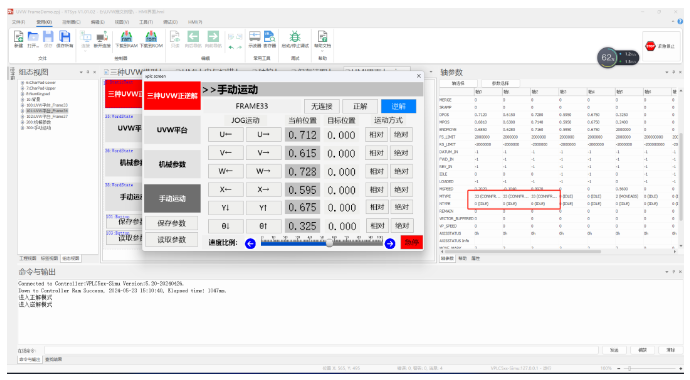
RTSys軟件支持Basic,HMI與PLC混合編程,本例程采用Basic結合HMI界面混合編程進行演示。可通過RTSys軟件菜單欄的【HMI】-【工具箱】,選擇空間進行拖拉擺放,設計交互界面。
1、將程序下載到控制器運行,先后點擊RTSys軟件菜單欄的【工具】-【插件】-【XPLC SCREEN】。
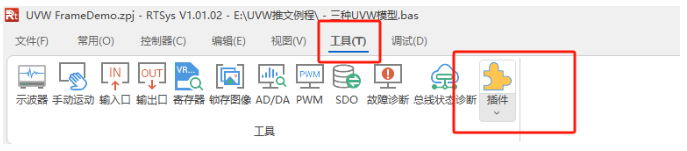
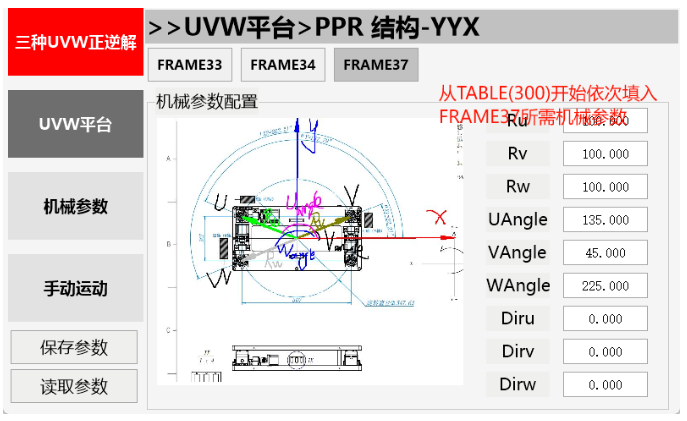
2、待交互界面彈出后點擊“UVW平臺”按鈕,根據實際硬件選擇對應UVW類型和配置對應機械參數。
3、選擇完UVW平臺類型和設置好機械參數后,點擊“機械參數”按鈕進行軸參數配置。

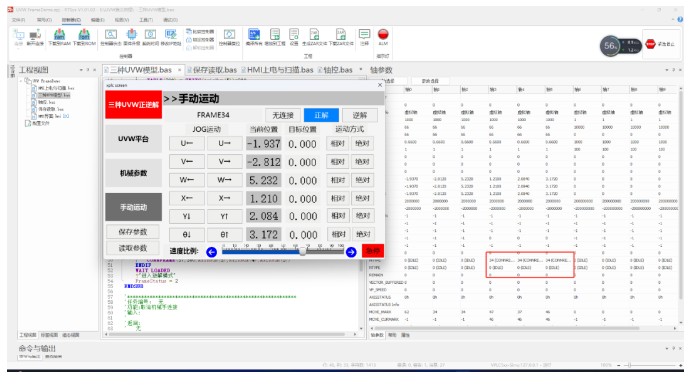
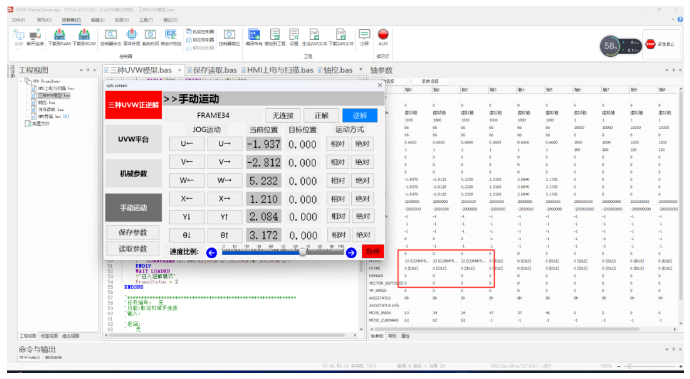
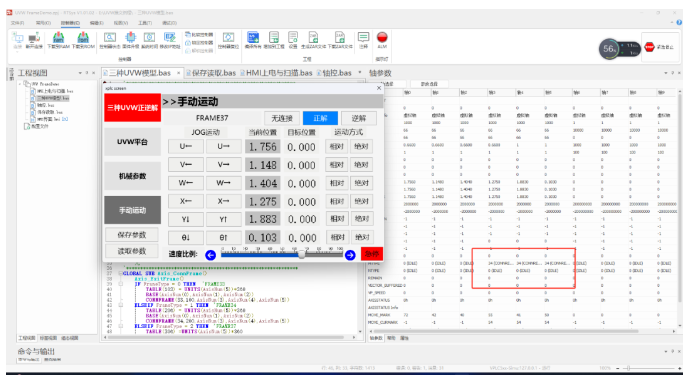
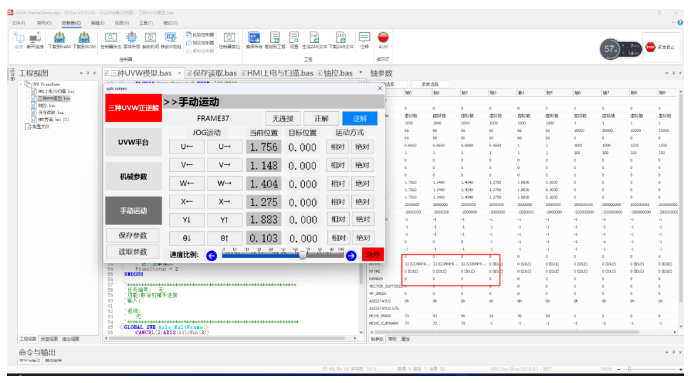
4、設置好UVW平臺和軸參數后,點擊“手動運動”進行正逆解切換,和操作對應軸進行運動。
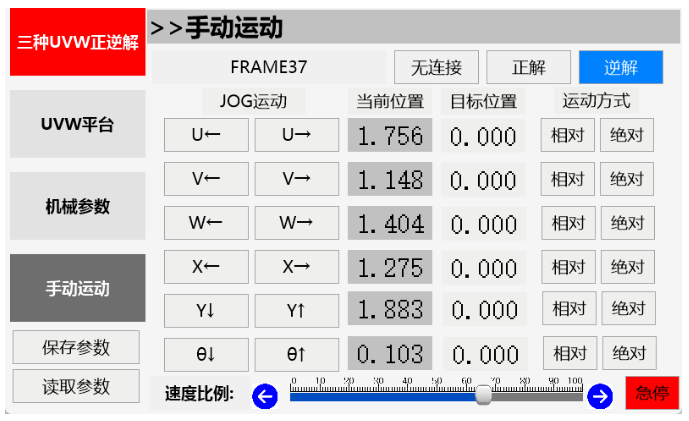
本次,正運動技術EtherCAT運動控制器在UVW對位平臺中的應用,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
接口
+關注
關注
33文章
8954瀏覽量
153231 -
運動控制器
+關注
關注
2文章
445瀏覽量
25159 -
ethercat
+關注
關注
19文章
1006瀏覽量
39643
發布評論請先 登錄

EtherCAT運動控制器在ROS上的應用開發案例(上)


正運動技術運動控制器EtherCAT總線快速入門

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集






 工商網監
工商網監
評論