 致敬經典:在國產開源操作系統 RT-Thread 重溫 UNIX 彩色終端
致敬經典:在國產開源操作系統 RT-Thread 重溫 UNIX 彩色終端
引言
上篇文章里我們向大家介紹了 RT-Thread v5.1.0 的一些新特性。其中包括了終端環境的進一步完善。終端是人機交互的重要接口。實用的終端工具可以顯著地提升系統使用者的幸福指數。舉例來說,當我們想要修改一些系統配置,或是編寫腳本時,一個好用的文本編輯器總是不可或缺。以 UNIX 文本編輯器 Vim 為例子。得益于 v5.1.0 內核對于 POSIX 的支持,我們拉取源碼構建燒錄后,就可以在 RT-Thread Smart 上享受到原滋原味的 Vim 編程體驗啦。
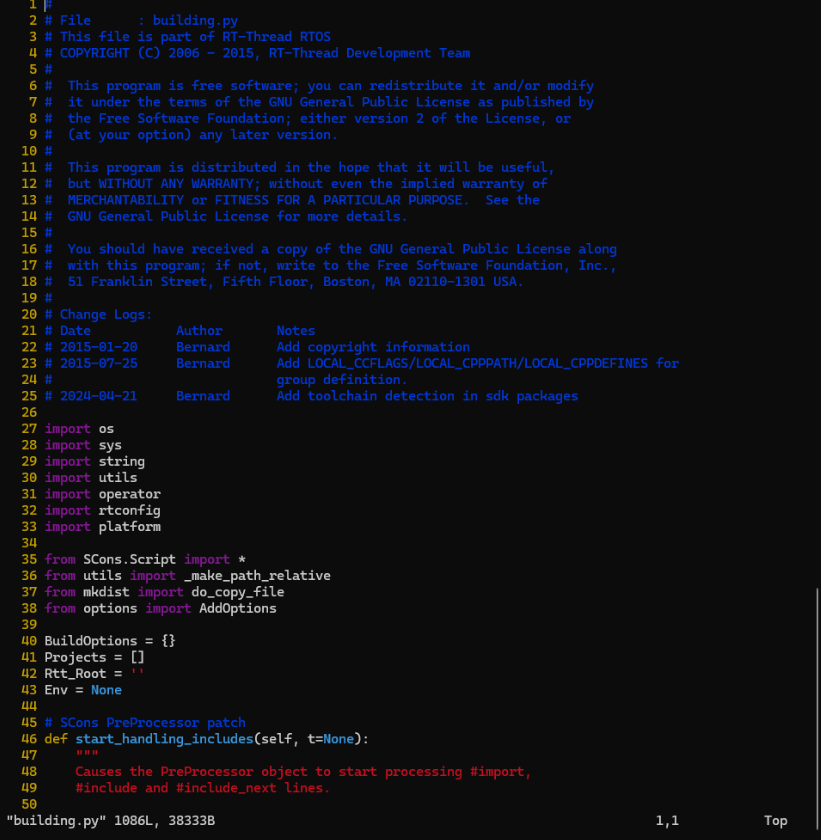
在 smart 上編輯 ./rt-thread/tools/building.py
感覺如何?如果你不滿足于淺嘗輒止,請不要擔心。接下來的文章里我們將向你繼續分享 RT-Thread Smart 中的終端環境組成和使用。
Busybox
被業內稱之為瑞士軍刀的BusyBox,嵌入式Linuxer對它肯定不會感到陌生,甚至熟悉到忽略他無時無刻的存在。它在單一的可執行文件中提供了精簡的Unix工具集,可運行于多款POSIX環境的操作系統。
RT-Thread Smart 已適配了上百種 Busybox 命令。而 Busybox 也是 Smart 當前的終端環境的一個重要組成部分。其中包括 init 提供的初始化和系統管理,ash提供的命令解釋、腳本執行、作業控制等。接下來我們結合實際例子深入探索這些部分的實際應用和能力。
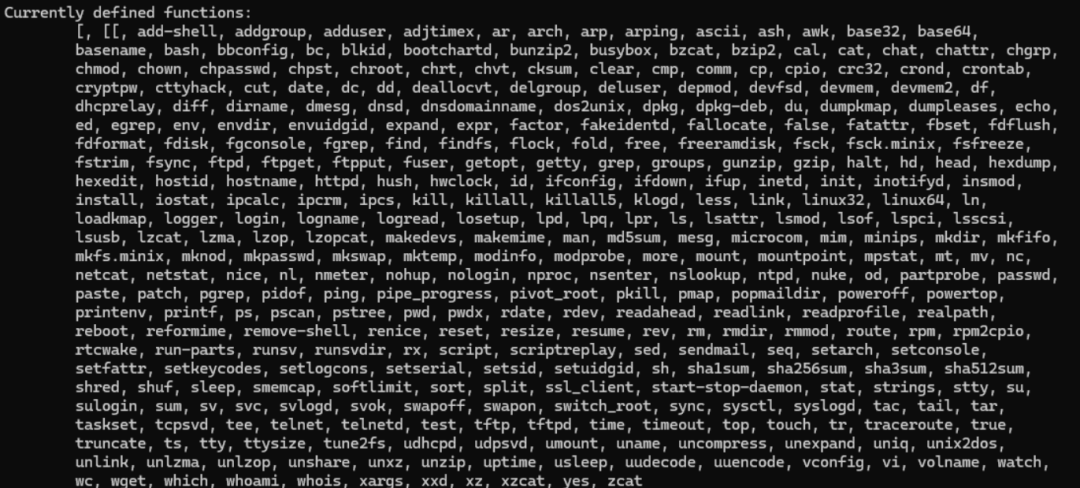
Smart 已適配的 Busybox 命令集
init進程介紹
init(為英語:initialization的簡寫)是 Unix 和 類Unix 系統中用來產生其它所有進程的程序。它以守護進程的方式存在,其進程號為1。系統在引導時加載內核后,便由內核加載init程序,由init程序完成余下的引導過程,比如加載執行級別,加載服務,啟動Shell/圖形化界面等等。
init進程運行之后會加載解析/etc/inittab文件的內容,根據腳本項目決定接下來的運行模式和需要啟動的命令。以下是本次體驗中使用的 inittab 腳本。
1#Copyright(c)2006-2024,RT-ThreadDevelopmentTeam
2#
3#SPDX-License-Identifier:Apache-2.0
4
5#MountFilesystem
6:mkdir-p/dev/shm/dev/pts/proc
7:mount-a
8
9#Rungetty&login
10console:/sbin/getty115200/dev/console
11
12#Restartbussiness
13:/sbin/init
根據這個腳本,init 進程會首先創建掛載點,然后通過 mount 命令掛載文件系統。等到上序進程都退出后,啟動 getty 獲得 console TTY 設備作為會話控制終端。getty 接著會啟動 login。它在 TTY 設備上等待用戶登錄,并在用戶名、密碼校驗成功后啟動 shell 程序,也就是 busybox ash 。
ash介紹
Almquist shell,經常被簡稱為 A Shell 或 ash,一種Unix shell,源自于Bourne shell,由肯尼斯·艾昆斯特(Kenneth Almquist)在SVR4上建立了這個分支。它的特色是快而且輕巧,兼容于POSIX,在后來的BSD版本上,它取代了Bourne shell。在BusyBox中,實現了類似于ash標準的shell的程序。
結合上文介紹的初始化過程配置,在系統登錄完成后,就會看到 ash 打印的命令提示符。此時一個 ash 進程就運行在 RT-Thread Smart 內核中實現用戶交互,命令解析。
系統登錄并執行 top 命令效果
既然來到shell中,那就不得不忽略其強大的腳本執行功能。shell 腳本的兼容度對于批處理、自動化測試來說非常重要。我們通過一個流行的 shell 腳本單元測試工具 shUnit2 展示這個功能。
https://github.com/kward/shunit2
shUnit2 本質是一套 shell 腳本庫,包含了眾多預定義函數。我們利用它,可以用簡單的腳本實現復雜的單元測試過程。將克隆下來的倉庫放入根文件系統的 /root 文件夾之后,可以在 ./shunit2/example 下看到一些樣例代碼。這里給出一個測試 suite 腳本。
1#!/bin/sh
2#本腳本就是倉庫對應路徑 ./example/suite_test.sh 文件的內容。
3#這是一個測試套件樣例,允許開發者將測試函數注冊到shUnit2框架中,
4#使其成為測試執行的一部分。對應的,沒有注冊的函數不會在 report 中體現
5suite(){
6suite_addTestsuite_test_one
7
8suite_test_two
9}
10
11suite_test_one(){
12assertEquals11
13}
14
15suite_test_two(){
16assertNotEquals12
17}
18
19#LoadandrunshUnit2.
20.../shunit2
在 ash 中執行這個文件,我們就成功在 RT-Smart 中運行了一個基于命令解釋器實現的單元測試 suite。
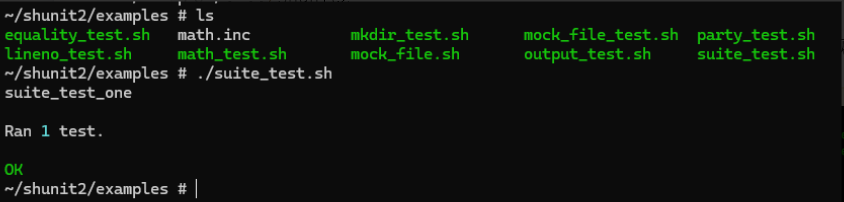
執行測試套件 suite_test.sh
作業控制(Job Control)介紹
在解釋作業控制前,我們先要簡單介紹一下它的概念。對于當前操作者來說,能夠操作的命令控制臺終端shell是一個獨立的shell,并根據是否可以直接操作當前shell的程序來將shell中的作業分為前臺與后臺兩種狀態。能夠直接在shell上交互的程序稱為前臺狀態,而不能直接交互的程序為后臺狀態。如果把所有的前后臺程序都統一稱作作業(job),那么可以基于當前的shell對所有的job來進行作業控制,從而稱作job control。
如上所述job control就是基于當前的shell前后臺作業來實現作業管理的,典型的管理有:將一個前臺程序ctrl+c終止掉,或將一個新的作業啟動放入后臺(&后綴啟動),或將一個后臺程序放入前臺(fg命令)。其它的操作例如還有:jobs命令查看所有后臺作業狀態,ctrl+z暫停一個前臺作業并放入后臺,bg將一個后臺作業轉入后臺運行等等。常用的操作命令集如:
●jobs命令
●fg 命令
●bg 命令
●ctrl+c/ctrl+z/ctrl+d/ctrl+\
●& 啟動后臺作業
那么作業控制有什么具體的應用呢?假設一個日常生活中的常見場景,首先我們使用 Vim 創建一個文件開始編輯。編輯過程中,可能突然需要做別的事情。此時就可以像 GUI 中的“最小化”操作一樣,通過 Ctrl^z 掛起 Vim 并回到 ash。通過 jobs 命令我們可以看到 Vim 掛起后更新為作業 %1 并處于停止狀態(Stopped)。
Vim 掛起效果
當我們想要繼續編輯時,就可以在 ash 中使用 fg 命令指定 Vim,將其恢復到前臺運行。這類似 GUI 中的“最大化”操作。當我們在 Vim 完成文檔編輯操作并退出后,可以通過 jobs 命令看到作業已經清空。通過 cat 命令我們看到文件已經成功保存。
后臺作業換入前臺效果
總結
基于 Busybox ,我們介紹了 RT-Smart 終端環境的使用體驗,看到了“瑞士軍刀” BusyBox 強大的功能。通過實際的啟動腳本示例,展示了 init 進程如何加載和初始化系統,通過 shUnit2 展示了 ash 提供的強大腳本執行能力,并借助 Vim 展示了job control 的前后臺控制特性。
不知道大家是否對 RT-Smart 的能力有了進一步了解。如果您對 RT-Thread Smart 的應用和功能感興趣,可以在RT-Thread 官方發布的 ART-Pi Smart 開發板上了解、學習和開發 RT-Thread Smart 系統與應用。這是首個運行 RT-Thread Smart 的 ARM Cortex-A7 開發板,具有強大的硬件性能和豐富的外設接口。
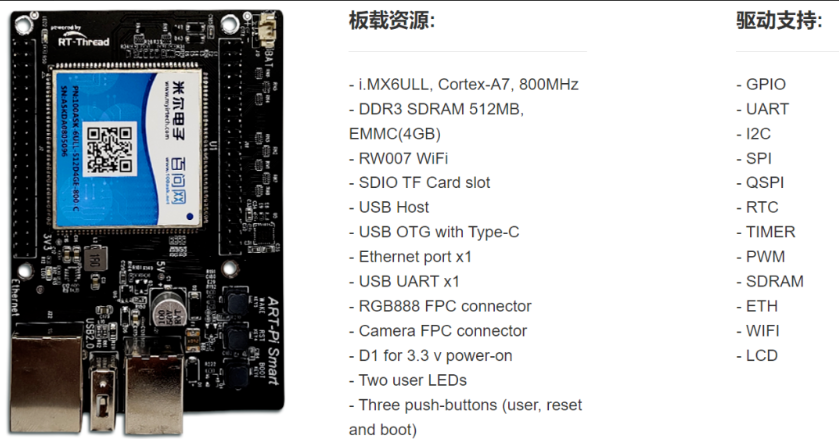
ART-Pi Smart 硬件規格情況
-
操作系統
+關注
關注
37文章
7103瀏覽量
125034 -
UNIX
+關注
關注
0文章
296瀏覽量
42120 -
開源
+關注
關注
3文章
3624瀏覽量
43527 -
RT-Thread
+關注
關注
32文章
1372瀏覽量
41556
發布評論請先 登錄
【直播預告】《實時操作系統應用技術—基于RT-Thread與ARM的編程實踐》教學脈絡及資源簡介

RT-Thread審核團招募: 深度參與開源RTOS社區治理與演進
中新社:RT-Thread攜“睿擎平臺”亮相工博會 | 媒體視角
RT-Thread嵌入式操作系統專業培訓班來上海啦!
RT-Thread操作系統應用開發寒假師資培訓
RT-Thread聯合河北大學發起嵌入式操作系統專業班-保定站
【本周六-深圳】RT-Thread嵌入式操作系統專業培訓班正式開班
混合部署 | 在迅為RK3568上同時部署RT-Thread和Linux系統
開源共生 商業共贏 | RT-Thread 2024開發者大會報名啟動!
睿賽德科技正式推出RT-Thread開源 4+服務,助力企業用戶發展
混合部署 | 在迅為RK3568上同時部署RT-Thread和Linux系統
新書發布——《RT-Thread嵌入式實時操作系統內核、驅動和應用開發技術》
RT-Thread內部機制大揭秘,帶你深入操作系統內核

睿賽德科技CEO熊譜翔 ——基于RT-Thread操作系統的安全車控系統實踐
RT-Thread 新里程碑達成——GitHub Star 破萬!





 工商網監
工商網監
評論