") 其利天下技術(shù)-無刷電機六步換相法
其利天下技術(shù)-無刷電機六步換相法
換相的時機只取決于轉(zhuǎn)子的位置,一種比較簡單的方式是用光電編碼盤充當(dāng)位置傳感器,這個東西在工業(yè)上用得比較多。
其次是用霍爾效應(yīng)器件來充當(dāng)位置傳感器,其可以根據(jù)轉(zhuǎn)子不同位置時的不同磁場方向分布情況,給出高電平或低電平的輸出,一般在電機的不同位置上裝三個霍爾傳感器,就可測出轉(zhuǎn)子的位置。這就是所謂的“有感無刷電機”。值得一提的是,車模和船模中的電調(diào)多是使用“有感”方式,因為其電機需要頻繁啟動、停止、反轉(zhuǎn),而且對整套動力系統(tǒng)的重量也不是十分講究,故用有感無刷電機電調(diào)是比較合適的。無感的方式則是省去位置傳感器,利用某時刻沒通電的第三相的反電動勢來估測轉(zhuǎn)子的位置。這使整套系統(tǒng)分量更輕,結(jié)構(gòu)更簡單。其缺點在于啟動比較麻煩,啟動的時候可控性較差,要達到一定轉(zhuǎn)速后才變得可控。
無感換相基本原理
那無感換相如何根據(jù)第三相的反電動勢來估測轉(zhuǎn)子的位置?如圖3-1,在AB通電期間,線圈CC’的C邊在圖(a)中切割N極的磁力線并產(chǎn)生一個正向的感生電動勢,在圖(b)中確是切割S極的磁力線而產(chǎn)生一個反向的感生電動勢了。C’邊的情況也類似。這說明,在AB相通電期間,如果去測量線圈 CC’上的電壓,會發(fā)現(xiàn)其間有一個從正到負的變化過程。于此類似,其余通電情況也可以用這個辦法分析。
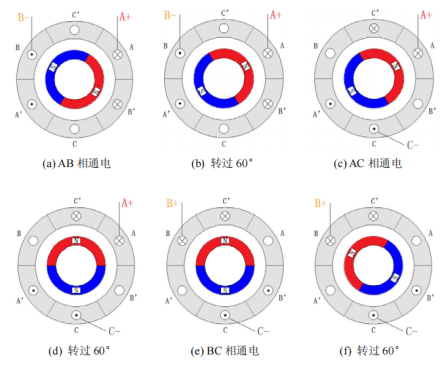 圖3-1
圖3-1那無感換相如何根據(jù)第三相的反電動勢來估測轉(zhuǎn)子的位置?如圖3-1,在AB通電期間,線圈CC’的C邊在圖(a)中切割N極的磁力線并產(chǎn)生一個正向的感生電動勢,在圖(b)中確是切割S極的磁力線而產(chǎn)生一個反向的感生電動勢了。C’邊的情況也類似。這說明,在AB相通電期間,如果去測量線圈 CC’上的電壓,會發(fā)現(xiàn)其間有一個從正到負的變化過程。于此類似,其余通電情況也可以用這個辦法分析。
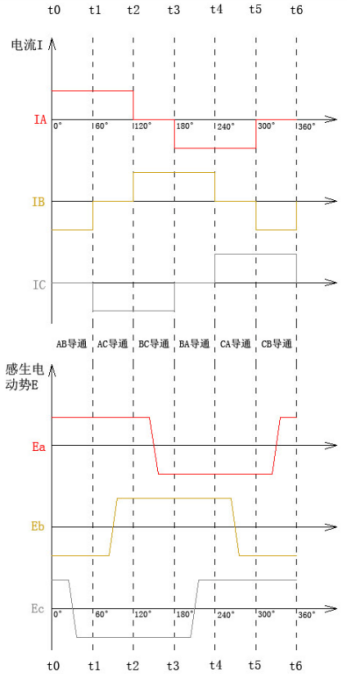 圖3-2
圖3-2在AB相通電期間,CC’的感生電動勢會整個換一個方向,也即所謂的“過零點”。在圖3-2的t0時刻,為AB相通電剛開始時的情況,CC’產(chǎn)生的感生電動勢的等效電路圖如圖3-3 (a)所示。而在t1時刻,為AB相通電快結(jié)束時的情況,CC’產(chǎn)生的感生電動勢的等效電路圖如圖3-3(b)所示。
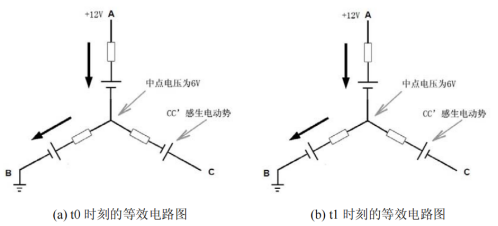 圖3-3
圖3-3這里需要說明一下的是,在AB相通電期間,不只是線圈CC’上產(chǎn)生感生電動勢,其實AA’和 BB’也在切割磁力線,也都會產(chǎn)生感生電動勢,其電動勢方向與外加的電源方向相反,所以叫“反向感生電動勢”(BEMF)。線圈繞組AA’和BB’上產(chǎn)生的反電動勢是很大的,兩者相加幾乎略小于電源電壓(假設(shè)為12V)。線圈繞組本身的等效電阻很小(約0.1歐左右),如果反電動勢不大的話,端電壓加載在線圈繞組等效電阻上,會產(chǎn)生巨大的電流,線圈非燒掉不可。為方便理解,姑且假設(shè)在額定轉(zhuǎn)速下AA’和BB’各產(chǎn)生5.7V的反電動勢,那么它們串聯(lián)起來就產(chǎn)生11.4V的反電動勢,那么施加在等效電阻上的電壓就為(12-11.4)=0.6V,最終通過繞組AB的電流就是0.6 /(2* 0.1)=3A。同理,由于各繞組的結(jié)構(gòu)是相同的,切割磁力線的速度也是相同的,所以線圈CC’也應(yīng)該會產(chǎn)生一個大小約為5.7V的感生電動勢。由于中點電勢值始終為6V,CC’的線圈產(chǎn)生的感生電動勢只能在以中點6V電勢為基準(zhǔn)點的基礎(chǔ)上疊加,仍舊假設(shè)在額定轉(zhuǎn)速下CC’上會產(chǎn)生5.7V的感生電動勢,那么在t0時刻,如果去測量C點的電壓,其值應(yīng)為6+5.7=11.7V;在t1時刻,C點的電壓值應(yīng)為6-5.7=0.3V。也就是說,在AB相通電期間,只要一直監(jiān)測電機的C相引線的電壓,一旦監(jiān)測到低于中點電壓,就說明轉(zhuǎn)子已轉(zhuǎn)過30°到達了t0和t1中間的位置,只要再等30°就可以換相了。如果電調(diào)的MCU足夠快的話,可以采用連續(xù)AD采樣的方式來測量C相電壓,不過會浪費CPU資源,因為大部分采到的AD值都是沒用的,我們只關(guān)心它什么時候低于中點電壓。可以使用一個模擬比較器來監(jiān)測過零信號。一旦C相輸出電壓低于中點電壓,比較器馬上可以感知并在輸出端給出一個下降沿。同理,當(dāng)電機處于AC相通電時,監(jiān)測的是B相輸出電壓;當(dāng)電機處于BC相通電時,監(jiān)測的是A相輸出電壓。繼續(xù)往前,當(dāng)電機開始進入BA 相通電時,C相輸出電壓一開始會處于一個較低的狀態(tài),過零事件發(fā)生時,C相輸出電壓會超過中點電壓,這時比較器會感知并輸出一個上升沿。接下來的CA,CB相通電情況也類似,不再贅述。
延遲換相
根據(jù)前文所述知道在C相的過零點,轉(zhuǎn)子只轉(zhuǎn)過30°,還需要再轉(zhuǎn)30°才可換相,那怎么知道轉(zhuǎn)動余下的30°需要多少時間呢?一種比較簡單的做法是近似認為轉(zhuǎn)子轉(zhuǎn)速在這 0°~60°的小范圍區(qū)間內(nèi)基本是恒定的:從AB相開始通電到檢測出C相過零點的前半段時間,基本等于后半段的時間。所以只要使用定時器計數(shù)前半段的時間間隔T1,等過零事件出現(xiàn)后再等待相同的時間再換相即可。當(dāng)然,更直接的方法是監(jiān)測到過零點后不延遲30°,而是直接換相。這種方法當(dāng)然也可行,但是會損失一點效率,且同等情況下轉(zhuǎn)矩也會減小。
消磁現(xiàn)象
在實際換相過程中,例如AB相切換到AC相的過程中,由B相電流突然減小(不會突然消失,續(xù)流一段時間直到自身能量耗盡),其線圈的自身電感會在續(xù)流期間,成為一個電動勢產(chǎn)生者,而且方向和原來相反,并疊加在中點之上。如圖3-4,此時B端電位是高于中點電位。注意(a)圖中B線圈的感生電動勢是導(dǎo)體切割磁力線產(chǎn)生的,而(b)圖中的續(xù)流電動勢是B線圈自身的電感產(chǎn)生的(其大小要高于切割磁力線的感生電動勢大小)。
當(dāng)B線圈能量耗盡后,切割磁力線的行為再次成為主導(dǎo)B相感生電動勢的主要因素,所以B端電位此時又會低于中點電位,這就是所謂的“消磁現(xiàn)象”。如圖3-5即為換相時出現(xiàn)的消磁現(xiàn)象。
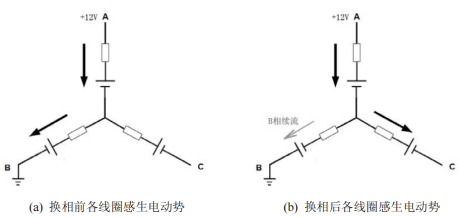 圖3-4
圖3-4當(dāng)B線圈能量耗盡后,切割磁力線的行為再次成為主導(dǎo)B相感生電動勢的主要因素,所以B端電位此時又會低于中點電位,這就是所謂的“消磁現(xiàn)象”。如圖3-5即為換相時出現(xiàn)的消磁現(xiàn)象。
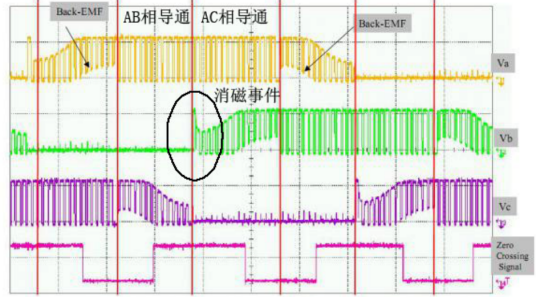 圖3-5
圖3-5由于消磁事件的存在,B端會在AC相通電期間,產(chǎn)生兩次上沖過零事件(也即模擬比較器會捕捉到兩次過零信號),前一次是無效的,后一次才是有效的過零信號。軟件上可通過以下策略濾除消磁現(xiàn)象的干擾,在比較器捕捉到過零信號后,檢查當(dāng)前距離上一次換相的時間是否大于延遲換相的時間,大于則為有效過零信號,小于則為消磁現(xiàn)象引發(fā)的過零。
六臂全橋MOS驅(qū)動電路
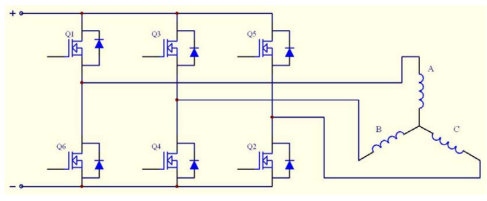 圖3-6
圖3-6圖3-6為六臂全橋MOS驅(qū)動電路簡圖。Q1到 Q6為功率場效應(yīng)管,當(dāng)需要AB相導(dǎo)通時,只需要打開Q1,Q4管,而使其他管保持截止。此時,電流的流經(jīng)途徑為:正極→Q1→線圈A→繞組B→Q4→負極。這樣,六種相位導(dǎo)通模式:AB, AC, BC,BA,CA,CB分別對應(yīng)的場效應(yīng)管打開順序為Q1Q4,Q2Q2, Q3Q2,Q3Q6,Q5Q6,Q5Q4。實際控制中,通常將上臂或者下臂常開,另一臂通入PWM信號進行控制。BLDC的調(diào)速就是用PWM信號的占空比進行調(diào)制。
反電動勢過零檢測電路
PHASE_A,PHASE_B,PHASE_C分別接電機的A,B,C線,經(jīng)過一個分壓網(wǎng)絡(luò)后分別為NULL_A,NULL_B,NULL_C,MITTEL為估測的變形后的中點電壓。只要在AB通電期間將NULL_C和MITTEL比較;AC通電期間將NULL_B和MITTLE比較;BC通電期間將NULL_A和MITTLE比較,就可以成功檢測出各相的過零事件。由于這三個過零事件產(chǎn)生的時間不同,如果能在比較器的輸入端不斷地切換這三個端點電壓,只要復(fù)用單個比較器就可以。
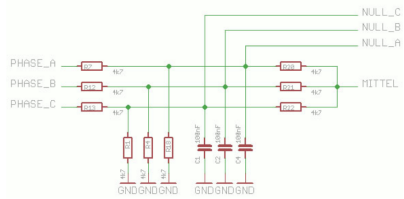 圖3-7
圖3-7制動策略
通常利用電機自身進行快速制動有兩種簡單的辦法,一種是能耗制動,一種是短接制動,能耗制動是把電機的動能消耗在外部制動電阻上,短接制動是把電機的動能消耗在電機的定子繞組上。顯然能耗制動對于減少電機發(fā)熱更加有利。
短接制動是指在剎車時能做到讓電機的驅(qū)動MOS管上橋臂(或者下橋臂)全部導(dǎo)通而下橋臂(或者上橋臂)截止?fàn)顟B(tài),電機的三相定子繞組全部被短接。處于發(fā)電狀態(tài)的電機,相當(dāng)于電源被短路。因為繞組的電阻比較小,所以能產(chǎn)生很大的短路電流,電機的動能被快速釋放,從而使電機瞬時產(chǎn)生極大的制動力矩,能夠達到快速剎車的效果。電機速度越高,短路電流越大,制動力也越大。
短接制動在廣義上也是能耗制動,
只是一般的能耗制動用的外接的耗能電阻,在超大功率場合應(yīng)用。中小功率都可以使用短接制動,使用Rs能耗制動。
考慮不能超過MOS管的承受能力,一般等待電機降低低速后再使用短接制動。實際設(shè)計時,考慮導(dǎo)通橋臂帶有PWM控制,這樣還可以對剎車力度進行適當(dāng)調(diào)節(jié)。為了避免在電機高速時產(chǎn)生過大的短路電流,一般開始短接制動時PWM占空比不要超過30%。當(dāng)電機速度降低為低速時,加大制動力矩,即使采用100%的占空比對于MOS管也是安全的。
其利天下驅(qū)動方案
 無刷電機驅(qū)動方案(家用風(fēng)扇、吊扇、落地扇)
無刷電機驅(qū)動方案(家用風(fēng)扇、吊扇、落地扇)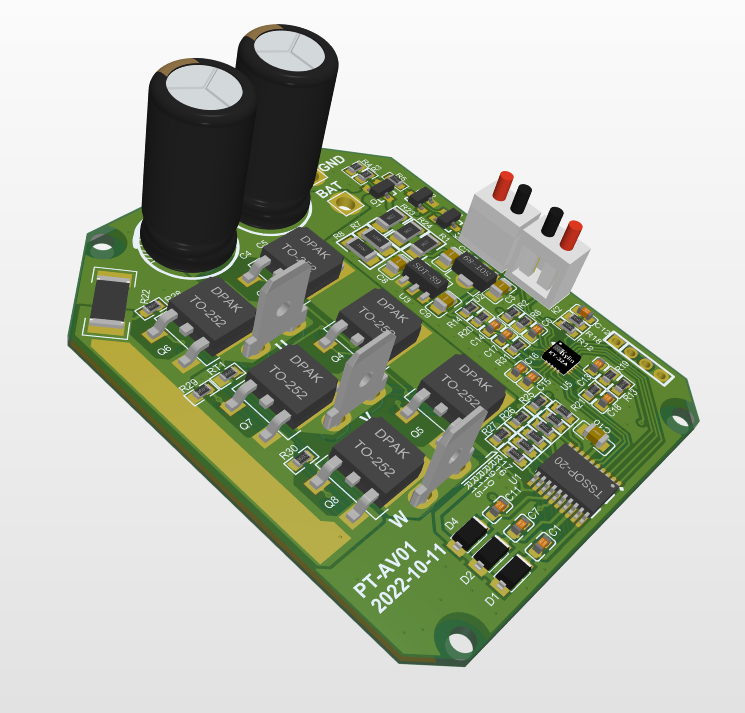 無刷電機驅(qū)動方案(電動工具)
無刷電機驅(qū)動方案(電動工具)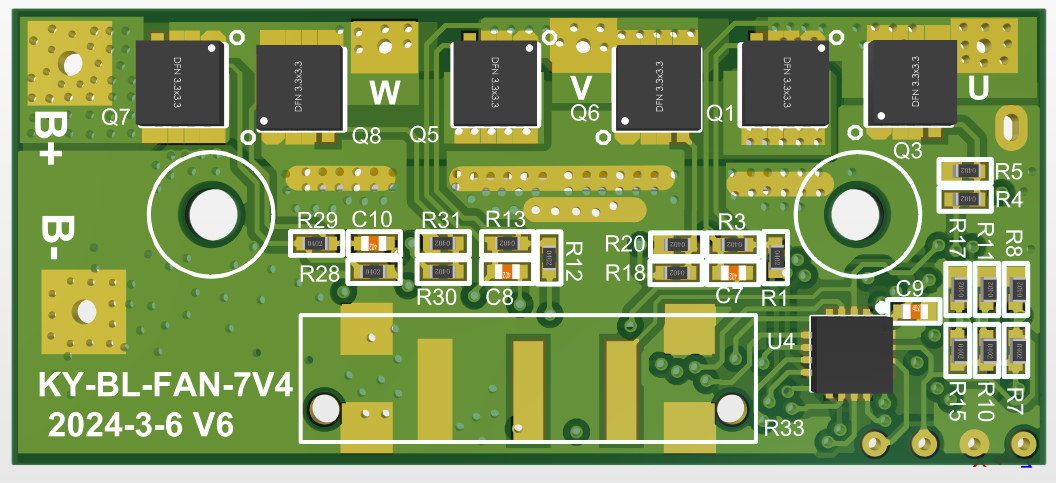 無刷電機驅(qū)動方案(暴力風(fēng)扇)
無刷電機驅(qū)動方案(暴力風(fēng)扇) -
無刷電機
+關(guān)注
關(guān)注
60文章
885瀏覽量
47137 -
BLDC電機控制
+關(guān)注
關(guān)注
2文章
22瀏覽量
14726 -
無刷電機驅(qū)動
+關(guān)注
關(guān)注
0文章
26瀏覽量
2676 -
無刷電機控制
+關(guān)注
關(guān)注
0文章
8瀏覽量
2237
發(fā)布評論請先 登錄
傳統(tǒng)路線與其利天下的分水嶺,無刷電鉆驅(qū)動方案對比--【其利天下】

六步換相法pwm控制bldc電機,電機超過額定電壓控制的原因?
如何實現(xiàn)直流無刷電機中的換相
采用六步換相法驅(qū)動無刷直流電機,最高速度只有電機額定速度的一半
無刷電機換相六步換向兩兩導(dǎo)通和三三導(dǎo)通的區(qū)別在哪兒?
電子換相無刷電機要對轉(zhuǎn)子永磁體位置進行精確檢測
電子換相無刷電機
什么是六步換相法
直流無刷電機FOC控制算法——理論

無刷電機無感六步方波驅(qū)動原理及過零現(xiàn)象產(chǎn)生分析
采用六步換相法實現(xiàn)直流無刷電機的正反轉(zhuǎn)驅(qū)動
其利天下技術(shù)·低速無刷電機如何更好的控制?無刷電機驅(qū)動方案開發(fā)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論