 減小系統穩態誤差可采用什么環節
減小系統穩態誤差可采用什么環節
減小系統穩態誤差是控制系統設計中的一個重要目標,它關系到系統的精度和性能。本文將介紹減小系統穩態誤差的方法和策略,包括開環增益、PID控制器、前饋控制、狀態觀測器、自適應控制、魯棒控制、智能控制等。
- 開環增益
開環增益是控制系統中最基本的參數之一,它直接影響系統的穩態誤差。開環增益越大,系統的穩態誤差越小。但是,過大的開環增益會導致系統的穩定性和抗干擾能力下降。因此,在設計控制系統時,需要合理選擇開環增益,以達到減小穩態誤差和保證系統穩定性的平衡。
1.1 開環增益的定義
開環增益是指在沒有反饋作用的情況下,輸入信號與輸出信號之間的比例關系。在數學上,開環增益可以表示為:
G_{OL} = frac{V_{out}}{V_{in}}
其中,V_{in} 是輸入信號,V_{out} 是輸出信號。
1.2 開環增益對穩態誤差的影響
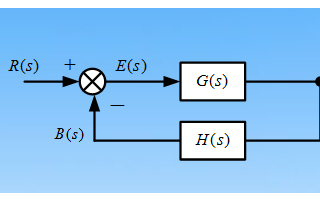
根據控制系統的基本原理,穩態誤差可以表示為:
e_{ss} = frac{r - y}{1 + G_{OL} cdot H}
其中,r 是參考輸入,y 是實際輸出,H 是反饋增益。從上式可以看出,開環增益越大,穩態誤差越小。
1.3 開環增益的選擇
在實際工程中,開環增益的選擇需要考慮多種因素,如系統的穩定性、抗干擾能力、成本等。一般來說,可以通過以下方法來選擇開環增益:
- 根據系統的性能要求,確定穩態誤差的允許范圍。
- 通過仿真或實驗,測量系統的開環增益和穩態誤差之間的關系。
- 根據穩定性分析,確定開環增益的最大值,以避免系統的不穩定。
- 綜合考慮成本、可靠性等因素,選擇一個合適的開環增益。
- PID控制器
PID控制器是一種常見的反饋控制器,它通過比例(P)、積分(I)和微分(D)三個環節來調整系統的輸出,以達到減小穩態誤差的目的。
2.1 PID控制器的基本原理
PID控制器的基本結構可以表示為:
u(t) = K_p e(t) + K_i int_{0}^{t} e(tau) dtau + K_d frac{de(t)}{dt}
其中,u(t) 是控制器的輸出,e(t) 是誤差信號,K_p、K_i 和 K_d 分別是比例、積分和微分增益。
2.2 PID控制器對穩態誤差的影響
PID控制器可以有效地減小系統的穩態誤差。具體來說:
- 比例環節可以快速響應誤差信號,減小誤差的大小。
- 積分環節可以消除穩態誤差,提高系統的精度。
- 微分環節可以預測誤差的變化趨勢,提前調整控制器的輸出,減小超調和振蕩。
2.3 PID控制器的設計方法
PID控制器的設計方法有很多,如經驗法、極點配置法、最小方差法等。在實際工程中,可以根據系統的特點和性能要求,選擇合適的設計方法。一般來說,設計PID控制器需要考慮以下步驟:
- 確定系統的開環傳遞函數或模型。
- 選擇合適的控制規律,如比例控制、比例-積分控制、比例-微分控制或比例-積分-微分控制。
- 通過仿真或實驗,調整PID參數,以達到減小穩態誤差和滿足性能要求的目的。
- 進行穩定性分析和抗干擾能力評估,確保控制器的可靠性。
- 前饋控制
前饋控制是一種基于輸入信號預測系統輸出的控制方法。通過引入前饋環節,可以提前調整系統的輸出,減小穩態誤差。
3.1 前饋控制的基本原理
前饋控制的基本結構可以表示為:
u(t) = G_f r(t) + G_c e(t)
其中,G_f 是前饋增益,G_c 是反饋增益。
3.2 前饋控制對穩態誤差的影響
前饋控制可以有效地減小系統的穩態誤差。具體來說:
- 前饋環節可以根據輸入信號的變化趨勢,提前調整系統的輸出。
- 前饋控制可以消除系統的純積分誤差,提高系統的精度。
- 前饋控制可以減少系統的超調和振蕩,提高系統的穩定性。
-
控制系統
+關注
關注
41文章
6761瀏覽量
111840 -
反饋控制器
+關注
關注
0文章
7瀏覽量
5589 -
穩態誤差
+關注
關注
0文章
8瀏覽量
2149
發布評論請先 登錄






 工商網監
工商網監
評論