 一文讀懂圖像傳感器的選型
一文讀懂圖像傳感器的選型

圖像傳感器是將光信號轉換為電信號的芯片,在相機、智能手機、安防監控、汽車電子和機器視覺等市場中有著廣泛的應用。圖像傳感器的工作原理主要基于光電效應。光子通過鏡頭進入傳感器,并被傳感器中的光電二極管吸收,產生電子。電子被收集并轉化為電信號,經過放大和處理,最終形成數字圖像。
來百度APP暢享高清圖片圖1、圖像傳感器工作原理(圖源:硬禾學堂)圖像傳感器按技術原理通常分為CCD(Charge-Coupled Device,電荷耦合器件)、CMOS(Complementary Metal Oxide Semiconductor,互補金屬氧化物場效應管)和CIS(Contact Image Sensor,接觸式圖像傳感器)、ToF 3D Image Sensors(Time of Flight 3D Image Sensors,3D-ToF 圖像傳感器)和TIS(Thermal Image Sensor,熱敏圖像傳感器)五種。CCD和CMOS最為常見,CIS一般用在掃描儀中。由于是接觸式掃描(必須與原稿保持很近的距離),只能使用LED光源,其景深、分辨率以及色彩表現目前都趕不上CCD感光器件,也不能用于掃描透射片。
圖2、圖像傳感器示例(圖源:濱松)
CCD具有低照度效果好、信噪比高、通透感強、色彩還原能力佳等優點,主要用于照相機、攝像機、智能交通、醫療等高端應用。因成本高、功耗大,一定程度上制約了CCD的市場發展空間。隨著CMOS工藝和技術的不斷提升,加之高端CMOS的價格不斷下降,在安防高清攝像、工業和汽車等市場,CMOS的市場份額越來越高。

圖3、CCD與CMOS對比表(圖源:小牛自動化)
圖像傳感器的功能是光電轉換。關鍵的參數有像素、單像素尺寸、芯片尺寸、功耗。CMOS圖像傳感器也是一個多層結構,技術工藝上有前照式(FSI)、背照式(BSI)、堆棧式(Stack)等。前照式(FrontSide lllumination,縮寫為FSI)結構中,自上至下依次為片上透鏡(Micro-lens)、彩色濾光鏡(Color Filter)、電路層(Wiring Layers)和光電二極管(Photodiodes)。當光線射入,經過了片上透鏡和彩色濾光片后,先通過電路層(金屬排線層),最后光線才被光電二極管接收。
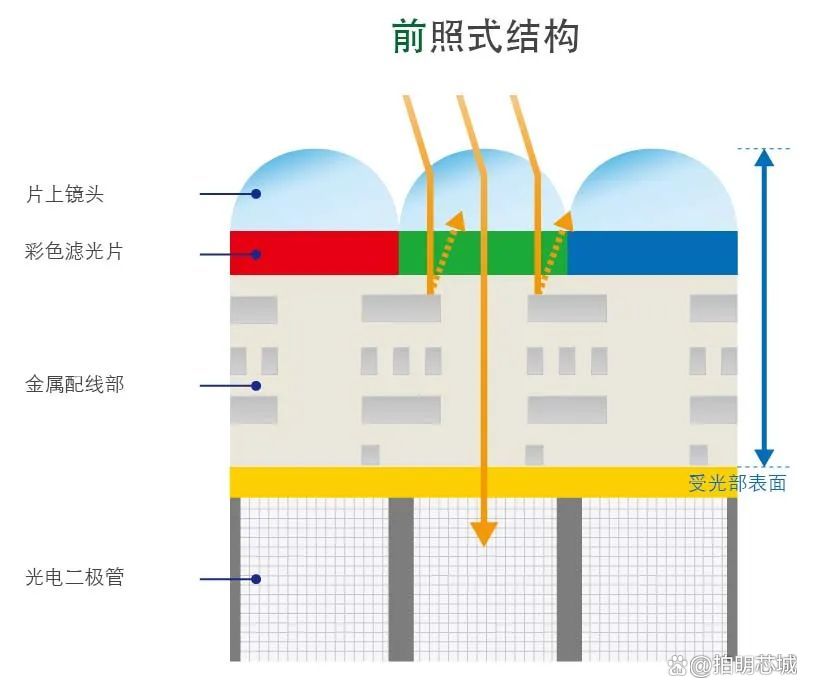
圖4、前照式CMOS圖像傳感器結構背照式CMOS(Back-Illuminated CMOS或者BackSide Illumination,BSI)的金屬排線和光電二極管的位置和前照式正好相反。自上至下依次為片上透鏡(Micro-lens)、彩色濾光片(Color Filter)、光電二極管(Photodiodes)和電路層(Wiring Layers)。
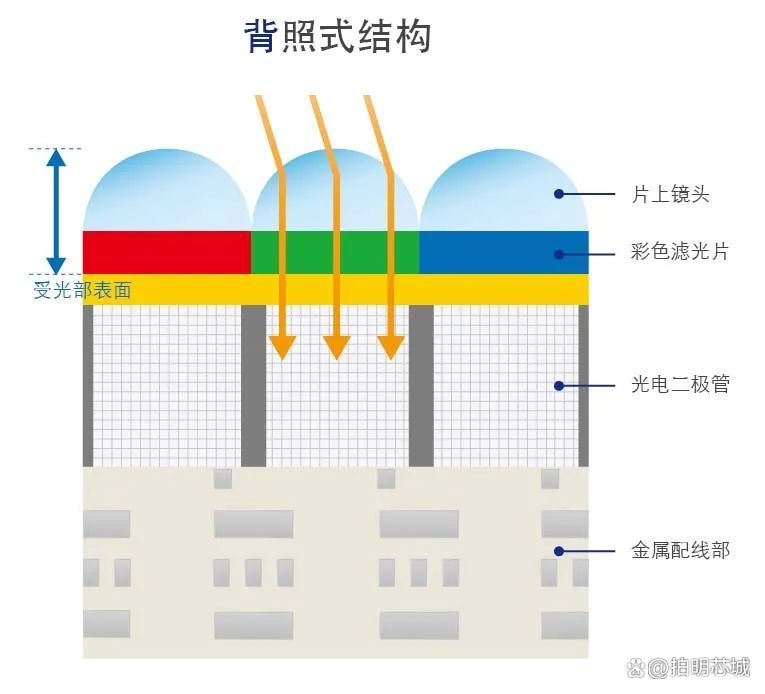
圖5、背照式CMOS圖像傳感器結構將像素單元和電路單元分別是作為獨立芯片構建,使用30nm制程打造電路單元,65nm打造像素單元,并單獨“退火”,然后將兩個單元堆疊到一起,這就是堆疊式CMOS,也叫堆棧式,積層式(stacked CMOS)。堆疊式不僅繼承了背照式的優點(像素區域依然是背照式),還克服了其在制作上的限制與缺陷。由于處理回路的改善和進步,攝像頭也將能提供更多的功能,比如說硬件 HDR,慢動作拍攝等等,同時因為像素區域和電路區域分開,CMOS的尺寸變小。另一方面,相同CMOS尺寸下,像素區域能更大。以上, 堆疊式CMOS具有了高畫質,多功能,小型化的特點。
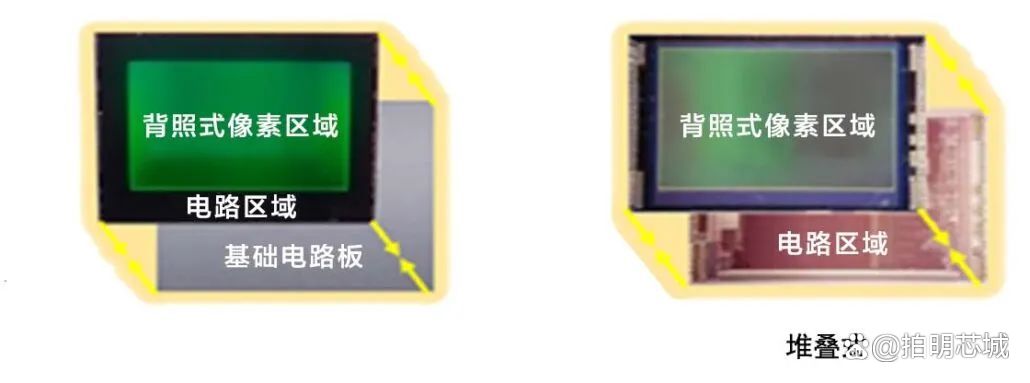
圖6、堆疊式CMOS圖像傳感器結構
無論是CMOS或CCD圖像傳感器,其光電參數都可依據業界成熟的EMVA1288標準進行評價。EMVA1288標準是歐洲機器視覺協會(EMVA)制定,為視覺行業提供相機與圖像傳感器關鍵性能參數的測試標準,被中國CMVU、美國AIA、日本JIIA、德國VDMA等行業組織接受,是國際國內通用的相機與圖像傳感器測試標準。

圖7、EMVA1288標準
接下來我們更詳細地列出圖像傳感器的光電參數,以及工程師該如何理解和選型應用。圖像傳感器主要指標包含:
分辨率/像素數量(Resolution, Number of Pixels)、像素尺寸(Pixel size)、光學尺寸(Optical Format)、像素技術(Pixel Technology)、快門類型(Shutter Type)、量子效率(Quantum Efficiency, QE)、靈敏度(Sensitivity)、暗噪聲(Dark Noise)、滿阱容量(Full Well Capacity, FWC)、動態范圍(Dynamic Range, DR)、暗電流(Dark Current, DC)、輸出格式(Output Format)、輸出接口(Output Interface)、最大幀率(Max Frame Rate)、主光線角度(CRA)、信噪比(SNR)、光譜響應特性(Spectral Response Characteristic)、色彩濾波陣列(Chroma)、封裝(Package)、串擾(Crosstalk)、曝光時間(Exposure Time)、增益(Gain)、色彩模式(Color Mode)、功耗(Power)和性價比(Price Quality)等。
1、分辨率/像素數量(Resolution, Number of Pixels)
圖像傳感器的感光區是由多個像元排列的一維或二維矩陣,其中像元(或像素)為單個感光單元。圖像傳感器的分辨率通常由該矩陣的橫縱方向的像元數表示,如1920 x 1080,或由其乘積表示,如2百萬分辨率(2MP)。MP:Mega Pixel,兆像素(百萬像素)常見的有0.3M、1M、2M、5M、13M、20M、40M、100M(1億像素)等。像素數量和分辨率是兩個密不可分的重要概念,它們的組合方式決定了圖像的數據量,同樣大小的圖像,分辨率越高,包含的像素越多。像素總數是指所有像素的總和,像素總數是衡量CMOS圖像傳感器的主要技術指標之一。CMOS圖像傳感器的總體像素中被用來進行有效的光電轉換并輸出圖像信號的像素為有效像素。有效像素總數隸屬于像素總數集合。有效像素數目直接決定了CMOS圖像傳感器的分辨能力
。2、像素尺寸(Pixel size)
像素尺寸為每個像元的物理尺寸,即相鄰像元中心的間距。像元尺寸越大,能收集到的光子數越多,芯片靈敏度越高,意味著在同樣的光照條件下和曝光時間內,芯片能收集到的有效信號越多。在光強可控的工業應用中,像元尺寸一般在4.5-6.5微米之間;而在微光應用中,像元尺寸多在10微米到24微米之間,以保證足夠的靈敏度,提升圖像信噪比;在X射線成像應用中,多采用10-16微米的像元,可有效降低所需射線劑量,減少對人體不必要的輻射。像素尺寸通常的尺寸包括14um、10um、9um、7um、6.45um、3.75um、3.0um、2.0um、1.75um、1.4um、1.2um、1.0um等。同時,像元尺寸越大,滿阱越高、動態范圍越大,圖像傳感器的成像性能越好。然而在相同分辨率下,像元尺寸越大,芯片面積越大,芯片的成本和價格也會隨著像元尺寸成平方關系增長。
3、光學尺寸(Optical Format)
圖像傳感器的光學尺寸(Optical Format)是指圖像傳感器感光區域對角線的長度,一般用英寸表示。由于幾乎所有的工業鏡頭都按照傳感器的光學尺寸來進行分類,它是圖像傳感器最常用的指標之一。由于歷史原因,1"圖像傳感器的對角線長度為16毫米(而不是我們一般認為的25.4毫米)。例如,主流工業應用的圖像傳感器為2/3",其感光區域對角線長度為10.7mm。根據光學尺寸的大小,面陣CMOS 圖像傳感器可以分為光學尺寸>APS-C、光學尺寸介于 1"與 APS-C 之間、光學尺寸≤1"等三類。CMOS圖像傳感器的光學尺寸,成像系統的尺寸就越大,這樣一來,傳感器捕獲的光子多,感光性就越好,信噪比越低。常見的CMOS圖像傳感器尺寸有1/2.5''、1/1.8''、2/3''、1''、4/3''、1.8''。
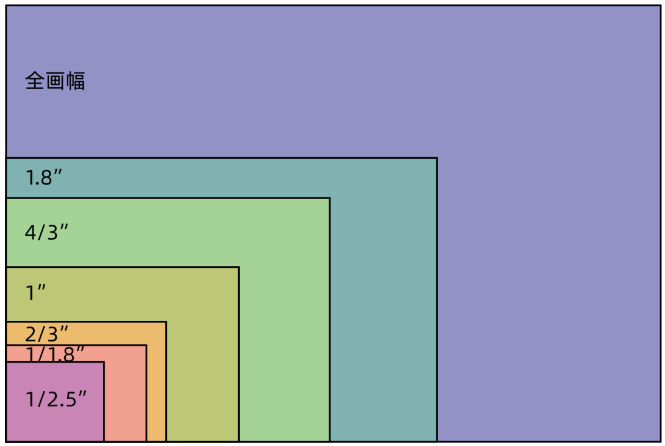
圖8、圖像傳感器常見的光學尺寸4、像素技術(Pixel Technology)
像素技術是指前照式CMOS、背照式CMOS和堆棧式(Stacked)CMOS。前照式CMOS電路層位于感光二極管前面,背照式CMOS電路層位于感光二極管后面。前照式CMOS的金屬電路擋在受光面前面,這樣會損失很多光線,真正能夠被感光二極管接收和利用的光線只剩70%甚至更少。很顯然,背照式CMOS極大提高了光線利用率,可以提高傳感器靈敏度,最明顯的改善就是低照度環境下成像質量更高。
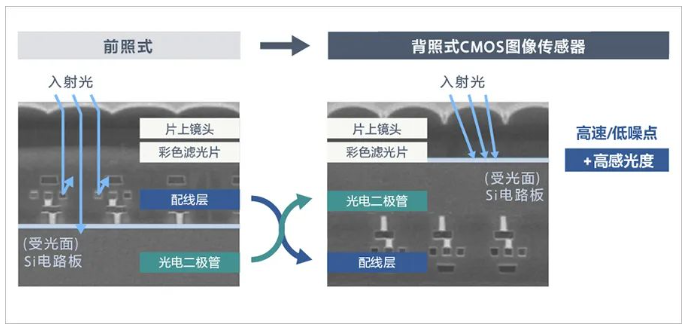
圖9、前照式與背照式CMOS圖像傳感器區別
堆棧式CMOS圖像傳感器最大的特點在于它的雙層結構,即將捕捉到的光線轉換為電信號的像素部和將電信號轉換為數字信息、進而進行信息處理的邏輯電路部。堆棧式傳感器是在背照式基礎上的改進,將旁置的信號處理電路放到了底部支持基板上,騰出空間放置更多的像素。
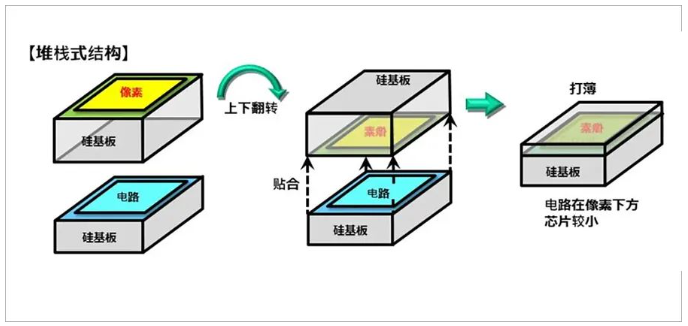
圖10、堆棧式CMOS圖像傳感器
5、快門類型(Shutter Type)
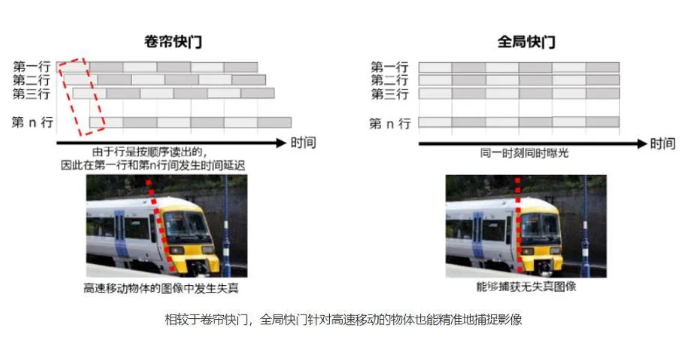
CMOS圖像傳感器片上集成電子快門,根據像素設計的不同,分為全局快門和卷簾快門。使用全局快門芯片時,所有像素同時開始曝光并同時結束,可捕捉高速運動物體的瞬時狀態。
圖11、兩種快門模式(圖源:影響空間)
全局快門:在全局快門像素設計中,每個像素中必須集成一個信號存儲單元。當曝光結束后,每個像素將其所捕捉的信號轉移至各自的存儲單元中,然后逐行讀出。由于在像素內集成存儲單元需要相對復雜的電路結構,降低了像素內有效感光面積,因此全局快門CMOS圖像傳感器一般噪聲較高、靈敏度和動態范圍較低,如索尼 IMX174的讀出噪聲為7個電子,CMOSIS(已被艾邁斯歐司朗收購)的CMV系列讀出噪聲為13個電子。卷簾快門:和全局快門不同,卷簾快門的每行像素開始曝光和截止曝光是在不同時間點發生的,但是所有像素的實際曝光時間是相等的。因卷簾快門像素內沒有存儲單元,曝光結束后,信號必須被馬上讀出。因為傳感器無法在同一時刻讀出所有行的信號,因此曝光須逐行停止、逐行讀出。為了保證每行像素的曝光時間相同,因此每行的開始曝光時間也需要順移。卷簾快門的工作模式如圖一所示:
因無需存儲單元,卷簾快門像素設計相對簡單,可以最大程度優化有效感光面積,提升傳感器的靈敏度,降低噪聲。比如BAE Systems、濱松和長光辰芯光電的sCMOS傳感器在卷簾快門模式下暗噪聲都小于2個電子。是否可以使用卷簾快門對移動物體成像一直是比較有爭議的話題,我們認為應根據具體應用參數評估,如物體相對移動速度、該運動物體在焦平面上的大小和曝光時間等。運動速度越快,在焦平面上的像越大,對全局快門傳感器的需求越明確,如高速工業檢測、汽車碰撞試驗、爆炸分析、航空測繪等。反之,如使用卷簾快門芯片,在擬采用曝光時間內物體在焦平面上的扭曲可忽略或可矯正,則應采用卷簾快門芯片,以獲得更高的靈敏度和更低暗噪聲,提升圖像質量。
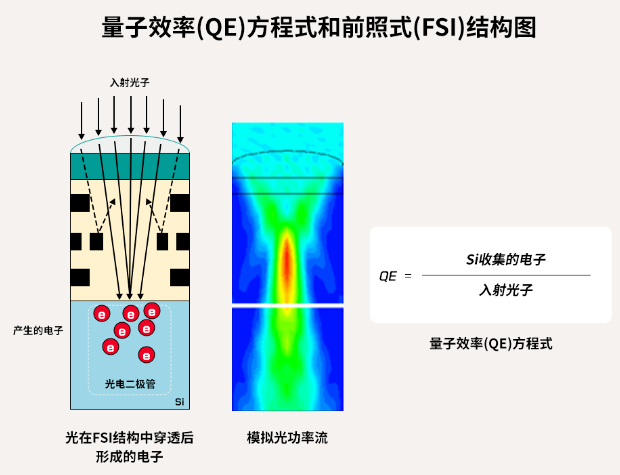
6、量子效率(Quantum Efficiency, QE)
量子效率(QE)是描述光電器件(比如CMOS圖像傳感器)光電轉換能力的一個重要參數,它是在某一特定波長(比如520nm)下單位時間內產生的平均光電子數與入射光子數之比。傳感器的光電轉換效率越高,其感光度就越高,圖像能夠提供的信息也更多。例如量子效率50%,意味著每2個照射到感光區域的光子可轉化成1個電子。其中,FF(FillFactor)為開口因子,是每個像元中有效感光面積與像元面積的百分比。像元尺寸越大或像元設計越合理有效,FF越高,量子效率越高。對于背照式圖像傳感器,光信號不經金屬遮擋,直接入射到感光區域,開口因子為100%。因此背照式圖像傳感器的量子效率較前照式器件有大幅提升。
CCD和CMOS圖像傳感器的量子效率一般在一定波長范圍內測定,如400nm~ 800nm,峰值量子效率一般在550nm左右。在400nm以下和800nm以上,圖像傳感器的量子效率會急速下降。受硅材料能級的限制,無論CMOS還是CCD器件,量子效率在1100nm以上都下降到零。使用窄帶半導體材料可實現對紅外譜段的探測,但這些材料與標準CMOS技術不兼容,因此不屬于CMOS圖像傳感器范疇。背照式圖像傳感器避免了正照器件表面二氧化硅層對紫外譜段的吸收,可實現對紫外譜段的探測。如在背照式工藝可對感光層表面進行加工,如添加紫外譜段抗反射鍍膜,可在紫外譜段實現較高的量子效率。具備紫外探測能力的圖像傳感器在科學和工業應用中有非常廣泛的用途,如光譜應用或高壓設備故障檢測等。如在圖像傳感器生產中采用加厚襯底材料,可增加紅外譜段的吸收效率,實現在800nm實現高于40%的量子效率。7、靈敏度(Sensitivity)
靈敏度是衡量圖像傳感器光電性能的最重要指標,高靈敏度意味著可以在光照較暗或曝光時間較短的情況下得到清晰的圖像,所以在微光成像、高速成像等應用中,應選取具有高靈敏度的圖像傳感器芯片。由于CMOS傳感器的每個象素由四個晶體管與一個感光二極管構成(含放大器與A/D轉換電路),使得每個象素的感光區域遠小于象素本身的表面積,因此在象素尺寸相同的情況下,CMOS傳感器的靈敏度要低于CCD傳感器。
靈敏度是傳感器輸出信號相對入射光能量的變化,常用的靈敏度單位納安/勒克斯nA/Lux、伏/瓦(V/W)、伏/勒克斯(V/Lux)、伏/流明(V/lm)。因各傳感器廠家使用不同的單位,用戶很難對不同廠家芯片的靈敏度進行比較。在比較不同傳感器的靈敏度時,最客觀的單位應該是以e-/((W/m2)·s),它表征了像素收集光子的能力和進行光子到電子轉換的效率,只與像元尺寸和量子效率相關,與圖像傳感器的其他設置無關,因此可以最客觀、科學的表征傳感器的靈敏度。在EMVA1288標準中采用V/lux·s,需要注意的是電壓應采用像素輸出電壓作為信號值。然而像素的輸出電壓與圖像傳感器的電子電壓轉換增益(Conversion Gain)相關,轉換效率越高,靈敏度越高。因此如采用V/lux·s表征靈敏度時,須明確是像素輸出電壓,并標明轉化增益。由于DN為傳感器輸出的最終數字信號,在不確定數字信號的放大倍數及模擬數字轉換效率的情況下,一般不無法用DN/((W/m2)·s)來客觀的表示傳感器靈敏度。另一種是指器件所能傳感的對地輻射功率(或照度),與探測率的意義相同,單位可用W(瓦)或Lux(勒克斯)表示。Sensitivity常作為sensor暗光表現的常用指標。
8、暗噪聲(Dark Noise)
暗噪聲,又稱作時域暗噪聲或讀出噪聲,是指像素在完全黑暗環境中、最短曝光時間內、幀與幀之間、同一像素輸出的不一致性,它表征了圖像傳感器對于微弱信號的極限探測能力。如sCMOS器件的暗噪聲為1.5個電子,量子效率為50%,則該探測器的極限探測能力為3個光子。當有充足光照或光照條件可控,暗噪聲就不再重要了,因為它會被光信號的散粒噪聲所淹沒。以sCMOS器件為例,光信號為20000個光子,有效光信號為10000個電子,對應100個電子的散粒噪聲,遠超過1.5個電子的暗噪聲。這時圖像的信噪比將完全取決于光信號和光散粒噪聲。整個成像鏈路中的電路和元件都會對噪聲有所貢獻。主要貢獻噪聲包括散粒噪聲、FPN噪聲,讀出噪聲等。Shot noise是由于入射光子的時間和空間上的分布的統計特性導致的,光子是玻色子,滿足玻色-愛因斯坦分布,在可見波段附近,滿足hv>>kT,其分布可以用經典的泊松分布描述。Fano noise是光子激發多個載流子產生的,對于高能光子,其每一份光子可以激發出多個電子,因此低入射功率下可以看到其一份一份光子的光電轉換過程。對于可見波段附近, Fano noise的影響幾乎可以忽略不計(以硅為例,估算得到其Fano noise小于0.01e-)。除了隨著波長減小Fano噪聲增加外,隨著功率的增加fano噪聲也會增加趨勢。FPN noise是由于器件之間的差異性導致的噪聲,是一個不會隨著時間變化的固定噪聲。與shot noise不同的是,FPN噪聲正比于信號,而不是信號的開方。因此FPN的抑制對實現HDR十分重要。FPN的產生原因主要有三個方面,一是圖像傳感器感光像素的性能差異,二是讀出電路的差異,三是光學元件的影響(比如有顆粒或者結構件導致的衍射干涉)。不過換一個思路想,也可以通過設計特定的光學元件來特意引入FPN,此時相當于FPN是一個像素陣列分辨率大小的矩陣,相當于在感光同時實現乘加運算。Read noise讀出噪聲是讀出鏈路引入的噪聲,它不是輸入信號的函數,只與讀出電路有關。最終總的噪聲是所有噪聲源的疊加,可以通過PTC曲線的分析對器件的噪聲鏈路實現分析。
9、滿阱容量(Full Well Capacity, FWC)
滿阱是指像素所能收集并容納的電子個數的極限。滿阱容量直接決定了圖像傳感器的最大信噪比。當光信號足夠強,使得像素在較短曝光時間內達到滿阱時,信噪比最高。此時,噪聲被光信號的散粒噪聲主導,所以最大信噪比為
因此:在微光應用和高速應用中,應選取低暗噪聲和高靈敏度的圖像傳感器;而在光照充足或對于最大信噪比有明確要求的應用,應選取滿阱容量高的圖像傳感器。
10、動態范圍(Dynamic Range, DR)
動態范圍是圖像傳感器成像質量最重要的指標之一,表征了傳感器對強光和弱光同時分辨的能力。 圖像傳感器的動態范圍高,就可以探測更寬光強范圍內的場景信息,圖像的細節更豐富。動態范圍是滿阱與暗噪聲的比值,一般用分貝表示:
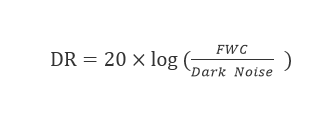
動態范圍包括單幅動態范圍(intra-scene)和最大動態范圍。單幅動態范圍是在同一增益設置下滿阱容量和暗噪聲的比值;而最大動態范圍是芯片所能達到的最大滿阱與最小暗噪聲的比值。像素尺寸越大,滿阱越高,動態范圍越高,圖像傳感器的光電性能越好。用戶需要注意區分“動態范圍”和“最大信噪比”兩個參數,動態范圍是滿阱除以暗噪聲、最大信噪比是滿阱除以達到滿阱光強時的光散粒噪聲,因此探測器動態范圍往往遠大于最大信噪比。
11、暗電流(Dark Current, DC)
暗電流為像素在單位時間內受熱激發產生的電子的均值,單位為e-/s/pix。暗電流噪聲為在一定曝光時間內產生的暗電流的平方根,例一個圖像傳感器的暗電流為36e-/s/pix,曝光時間為100秒,則暗電流為3600e-,暗電流噪聲為60e-。因此,隨著曝光時間的增加,暗電流噪聲會超越暗噪聲,對圖像質量產生很大的影響。暗電流和傳感器的工作溫度關系密切。因此對于長曝光時間應用,如天文觀測、熒光成像等,一般會對圖像傳感器進行制冷,使其工作溫度在零下30度左右;對于科學級應用,甚至會降溫到零下70度,以減小暗電流噪聲對圖像質量的影響。
12、輸出格式(Output Format
)12.1、RAW(或RAWRGB)
CMOS圖像傳感器輸出的原始圖像格式是RAW。RAW圖像就是CMOS圖像感應器將捕捉到的光源信號轉化為數字信號的原始數據。RAW文件是一種記錄了數碼相機傳感器的原始信息,同時記錄了由相機拍攝所產生的一些原數據(Metadata,如ISO的設置、快門速度、光圈值、白平衡等)的文件。RAW是未經處理、也未經壓縮的格式,可以把RAW概念化為“原始圖像編碼數據”或更形象的稱為“數字底片”。
12.2、RGB
RGB565,每個像素用16位表示,RGB分量分別使用5位、6位、5位(常用也就是上說的RGB)。
RGB555,每個像素用16位表示,RGB分量都使用5位(剩下1位不用)。
RGB24,每個像素用24位表示,RGB分量各使用8位。
RGB32,每個像素用32位表示,RGB分量各使用8位(剩下8位不用)。ARGB32,每個像素用32位表示,RGB分量各使用8位(剩下的8位用于表示Alpha通道值)。
12.3、YUVYUV三個字母中,其中"Y"表示明亮度(Luminance或Luma),也就是灰度值。而"U"和"V"表示的則是色度(Chrominance或Chroma),作用是描述影像色彩及飽和度,用于指定像素的顏色。YUV存儲格式有兩大類,planar(平面格式)和packed(打包格式)。13、輸出接口(Output Interface)
13.1、MIPI,移動行業處理器接口,是MIPI聯盟發起的為移動應用處理器制定的開放標準。串行數據,速度快,抗干擾,主流輸出接口。13.2、LVDS,低壓差分信號技術接口。
13.3、DVP,并口傳輸,速度較慢,傳輸的帶寬低。
13.4、Parallel,并行數據,含12位數據信號,行場同步信號和時鐘信號。
13.5、HISPI,高速像素接口,串行數據。
13.6、SLVS-EC,由SONY公司定義,用于高幀率和高分辨率圖像采集,它可以將高速串行的數據轉化為DC(Digital Camera)時序后傳遞給下一級模塊VICAP(Video Capture)。SLVS-EC串行視頻接口可以提供更高的傳輸帶寬,更低的功耗,在組包方式上,數據的冗余度也更低。在應用中SLVS-EC接口提供了更加可靠和穩定的傳輸。
14、最大幀率(Max Frame Rate)
幀率指的是單位時間所記錄或者播放的圖片的數量,最大幀率指每秒可以輸出多少幀的峰值。盡管有時會要求每秒60幀,但大多數傳輸使用的速度為每秒30-40幀。幀速率和分辨率密切相關,并影響需要處理的數據量。連續播放一系列圖片就會產生動畫效果,根據人類的視覺系統,當圖片的播放速度大于15幅/秒的時候,人眼就基本看不出來圖片的跳躍。在達到24幅/s~30幅/s時就已經基本覺察不到閃爍現象了。每秒的幀數或者幀率表示CMOS圖像傳感器在處理圖像時每秒鐘能夠更新的次數。高的幀率可以得到更流暢、更逼真的視覺體驗。
15、主光線角度(CRA)
從鏡頭的傳感器一側,可以聚焦到像素上的光線的最大角度被定義為主光角(CRA),鏡頭軸心線附近接近零度,與軸心線的距離越大,角度也隨之增大。CRA與像素在傳感器的位置是相關的。如果lens的CRA小于CMOS Sensor的CRA,一定會有偏色現象。lens的CRA一般略大于CMOS Sensor的CRA。拍明芯城是快速撮合的元器件交易平臺,過去數年已積累了豐富的優勢貨源。我們聚焦服務元器件長尾客戶群,讓每一家芯片原廠或分銷商的每一款芯片,在Design In、Design Win和流通中更高效,幫助工程師的方案選型、試樣及采購,為電子產業供需略盡綿薄之力。
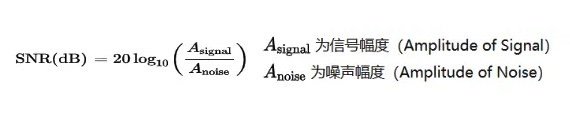
16、信噪比(SNR)
信噪比主要決定于入射光的亮度級(事實上,在亮度很低的情況下,噪聲可能比信號還要大)。所以,信噪比應該將所有的噪聲源都考慮在內,有些資料中常常忽略散粒噪聲,而它恰恰是中、高信號電平的主要噪聲來源。CMOS sensor的數據手冊一般都會提供信噪比參數SNR,如下所示。信噪比的典型值為45~55dB,若為50dB,則圖像有少量噪聲,但圖像質量良好;若為60dB,則圖像質量優良,不出現噪聲,信噪比越大說明對噪聲的控制越好。這個參數關系地圖像中噪點的數量,信噪比越高,給人感覺畫面越干凈,夜視的畫面中點狀的噪點就越少。

17、光譜響應特性(Spectral Response Characteristic)
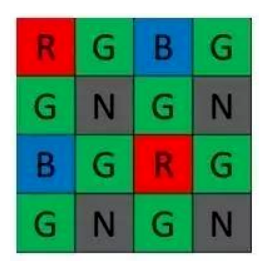
CMOS圖像傳感器的信號電壓Vs和信號電流Is是入射光波長λ的函數。光譜響應特性就是指CMOS圖像傳感器的響應能力隨波長的變化關系,它決定了CMOS圖像傳感器的光譜范圍。18、色彩濾波陣列(Chroma)常見的色彩濾波陣列:RGGB:一個紅光、一個藍光、兩個綠光濾波器。每個像素只能感應一種顏色的光,但是當對外輸出的時候,需要知道這個像素的RGB值,就只能通過周圍像素去計算,這個計算和轉換是靠ISP去完成的,進而得出這個像素的RGB的值。這樣每個像素雖然只感應了一種光,但是每個像素經過處理后傳輸到外面后就是有RGB的信息了。這些原始的感光數據成為RAW data。
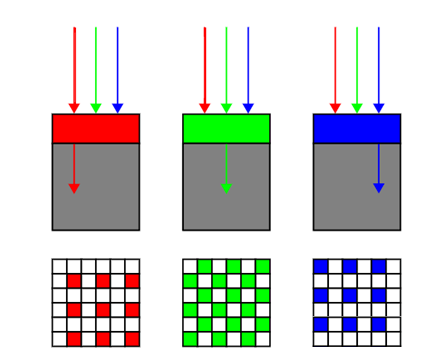
RCCC:75% 為透射,其余 25% 為只感受紅光的濾波器。RCCC 的優點是光靈敏度高,適用于弱光環境。由于 RCCC 只有紅色光濾波器,因此主要用在對于紅色標識敏感的場合,比如交通燈檢測。
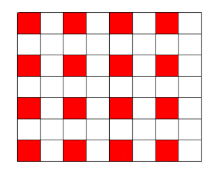
RCCB:50% 為透射,其余紅光藍光濾波器各占 25%。RCCB 的弱光敏感性比 RCCC 稍差,但分辨色彩的能力更好,采集的圖像既可以用于機器分析,也可以用于人眼觀察。
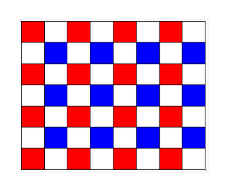
Mono:100% 透射。Mono不能分辨色彩。Mono 配置的弱光靈敏度最高,僅用于對顏色無識別要求的場合,如駕駛員狀態檢測等。
RGB NIR:把RGGB中的一個G換成了NIR。
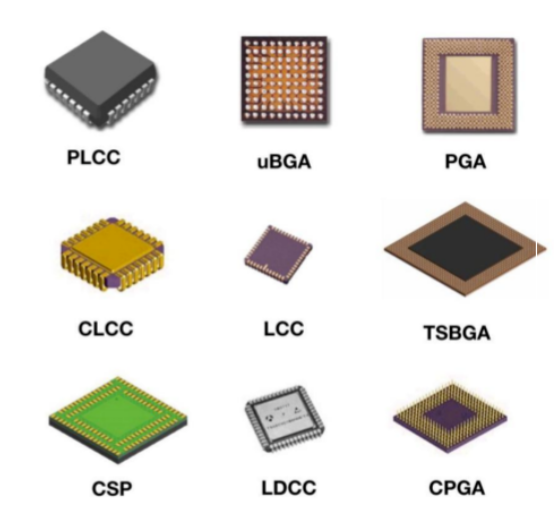
19、封裝(Package)
CSP: 芯片級封裝,芯片感光面被一層玻璃保護,CSP對灰塵點要求相對低點 sensor表面如果還有灰塵點可以返工修復,制程設備成本較低、制程時間短,但是光線穿透率不佳、價格較貴、高度較高、背光穿透鬼影現象。COB: 將裸芯片用導電或非導電膠粘附在互連基板上,然后進行引線鍵合實現其電連接。COB可將鏡片、感光芯片、ISP以及軟板整合在一起,封裝測試后可直接交給組裝廠,但是制作過程中容易遭受污染,對環境要求較高,制程設備成本較高、良品率變動大、制程時間長,無法維修等。

BGA: 球形觸點陳列,表面貼裝型封裝。球柵網格陣列封裝.
LGA: 平面網格陣列封裝.
PGA: 插針網格陣列封裝.Fan-out:扇出晶圓級封裝。
PLCC:帶引線的塑料芯片載體.表面貼裝型封裝。
20、串擾(Crosstalk)
串擾有兩種成分:光學串擾(Optical Crosstalk)和電學串擾 (Blooming)。光學串擾成分來源于漫射光或對角度敏感的片上微透鏡陣列。不考慮電學串擾成分的前提下,波長較長的光發生光電轉換生成信號電荷的區域較深,可能會擴散到相鄰的像素。減少該類電荷擴散的方法,包括:
20.1、在保持表面對紅光光譜響應率的條件下,使有效光電轉換深度變淺。例如,使用正向偏置n型襯底。
20.2、在像素間加入隔離區。例如,對于CMOS圖像傳感器可以采用更高滲雜度的p型隔絕區包圍光電二極管區域。對于小像素來說,通常會制作片上微型透鏡以增加靈敏度。微型透鏡能將入射光線匯聚到光電二極管區域的中心上,因此也能減少串擾。
21、曝光時間(Exposure Time)
曝光時間越長,圖像傳感器接收到的光照時間越長,亮度也會越高。
22、增益(Gain)
增益指的是信號放大的倍率。增益通常分為數字增益和模擬增益,大部分CMOS同時具有這兩種增益,每種增益可以獨立調節倍數,例如4×的模擬增益和2×的數字增益,最終效果是兩個相乘。由于增益放大信號的同時,也會放大噪聲,因此并不是越高的增益越好,需要綜合場景進行考慮,特別是機器視覺的使用場景下,高噪聲容易帶來誤報,反而影響效果。
23、色彩模式(Color Mode)
色彩模式分為黑白(Mono),彩色(Color)兩種類型。彩色模式的傳感器大多數采取Bayer形式的數據格式,Bayer格式的數據需要進行色彩還原,最左上的2x2或者2x1區域定義為Bayer格式,如RGGB或RG。
24、功耗(Power)CMOS傳感器通常比CCD傳感器具有更低的功耗。這是因為CMOS傳感器的每個像素單元都有自己的轉換電路,可以獨立工作,只有在需要時才會被激活。而CCD傳感器需要額外的電荷傳輸器件來逐行傳輸電荷,因此消耗更多的功耗。25、性價比(Price Quality)無論是CMOS或是CCD,市場在售的圖像傳感器的價格比全定制圖像傳感器要低得多。如果非要定制,除非變化很小,那么定制CCD圖像傳感器的價格一般低于定制CMOS的價格。
①、汽車圖像傳感器選型
除了以上通用的選型準則,不同的行業應用有著不同的要求,下面我們一起來探討為汽車應用選擇圖像傳感器時最重要的考慮因素。
1、分辨率
你不一定要最高的分辨率,因為這些數據會給處理系統帶來負擔,并減慢反應時間。
考慮你的應用是否需要識別車道線或前方100米處的行人——我們發現在交通應用中,1080p分辨率是一個很好的中間點。這種分辨率可以很好地了解周圍的世界,而且,即使是10個攝像機系統,你的處理器也可以對收到的數據做出很好的反應。
2、像素大小
這與感光度有關。像素大小通常會被忽略,它決定了圖像感應在黑暗中捕獲光線的能力。我們有幾個傳感器可以在昏暗的月光下使用,像素大小足夠大,您可以很好地捕獲圖像。
3、高動態范圍
這使傳感器可以同時看到明暗區域。想想在橋下開車的例子。圖像傳感需要能夠看到橋前,橋下和橋外的場景。橋下可能是黑暗的,橋的前后可能是亮的。高動態范圍感應使您能夠準確地捕獲所有數據。
4、幀速率
這是指傳感器每秒可以輸出多少幀。盡管有時會要求每秒60幀,但大多數視頻數據使用的幀速率為每秒30-40幀。幀速率和分辨率密切相關,并影響需要處理的數據量。
5、彩色濾光片陣列
這項技術可設置對顏色(或光的波長)的敏感度。它指的是傳感器中像素的色度和特異性,并指示每個像素對光波長的特異性。正在開發新的彩色濾光片陣列以改善傳感器的響應能力。
6、減輕LED閃爍
這就是傳感器如何管理環境中的閃爍光。例如,此功能可將幀捕獲與場景中的外部LED同步,例如在停車燈處。這項技術可通過信號燈的LED自動調整圖像傳感器的定時。
7、全局快門
這是一種同時捕獲圖像傳感器中所有像素的快門。它對于眼睛跟蹤和駕駛員監控應用特別重要。與滾動關閉相比,這是一個不同的圖像捕獲過程。
②、機器視覺圖像傳感器的選型
機器視覺應用中,一般幀頻>50fps,拍攝距離短,生產環境光強可控,曝光時間較短,一般采用全局快門圖像傳感器,除特殊應用外,動態范圍60dB可以滿足大多數機器視覺的要求。在高速自動化生產線上應用的機器視覺產品,對幀頻要求都在150-300fps之間。由于機器視覺產品用量較大,對于芯片的價格有較高的要求。機器器視覺傳感器的選型有什么方便快捷的技巧嗎?
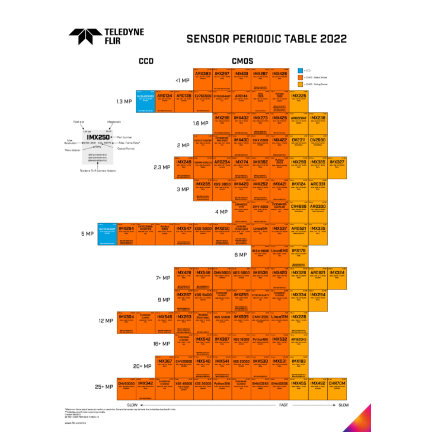
Teledyne FLIR將目前可用的機器視覺傳感器用顏色編碼整理成一張便于理解的周期表,從分辨率、像素尺寸、幀率和光學格式等各個維度的傳感器技術規格進行橫行和縱向對比,方便工程師們一目了然的進行快速選型,達到事半功倍的效果。此表涵蓋超過100種常用的機器視覺傳感器品類,包括第三代Sony Pregius、第四代Sony Pregius S、e2v、onsemi、OmniVision、CMOSIS和GPixel,而且在視覺上區分了CCD、CMOS卷簾快門和CMOS全局快門傳感器。
圖像傳感器供需,歡迎常來 拍明芯城元器件商城https://www.iczoom.com/ 看看
審核編輯 黃宇
-
圖像傳感器
+關注
關注
68文章
1971瀏覽量
130559 -
電信號
+關注
關注
1文章
842瀏覽量
21035
發布評論請先 登錄








 工商網監
工商網監
評論