") PWM技術(shù)如何實(shí)現(xiàn)電機(jī)的平滑啟動(dòng)和停止
PWM技術(shù)如何實(shí)現(xiàn)電機(jī)的平滑啟動(dòng)和停止
PWM(脈沖寬度調(diào)制)技術(shù)在電機(jī)控制中實(shí)現(xiàn)平滑啟動(dòng)和停止的功能,主要通過(guò)精確調(diào)節(jié)電機(jī)輸入電壓或電流的波形來(lái)實(shí)現(xiàn)。這種技術(shù)能夠顯著減少電機(jī)在啟動(dòng)和停止過(guò)程中的機(jī)械沖擊和振動(dòng),從而延長(zhǎng)電機(jī)壽命并提高系統(tǒng)的穩(wěn)定性。以下將詳細(xì)闡述PWM技術(shù)如何實(shí)現(xiàn)電機(jī)的平滑啟動(dòng)和停止。
一、PWM技術(shù)基本原理
PWM技術(shù)是一種通過(guò)改變脈沖信號(hào)的占空比(即脈沖寬度與脈沖周期之比)來(lái)控制電機(jī)輸入電壓或電流的方法。在PWM控制中,每個(gè)脈沖的周期是固定的,但脈沖的寬度可以根據(jù)需要進(jìn)行調(diào)整。通過(guò)調(diào)整占空比,可以實(shí)現(xiàn)對(duì)電機(jī)輸入電壓或電流的平均值的精確控制,從而實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩等參數(shù)的調(diào)節(jié)。
二、PWM技術(shù)實(shí)現(xiàn)電機(jī)平滑啟動(dòng)的原理
1. 減小啟動(dòng)電流沖擊
電機(jī)在啟動(dòng)時(shí),由于需要克服靜摩擦力和轉(zhuǎn)動(dòng)慣量,會(huì)產(chǎn)生較大的啟動(dòng)電流。如果直接給電機(jī)施加全電壓?jiǎn)?dòng),不僅會(huì)對(duì)電機(jī)本身造成沖擊,還可能對(duì)電網(wǎng)造成干擾。而PWM技術(shù)可以通過(guò)逐漸增加脈沖寬度(即占空比),使電機(jī)輸入電壓或電流逐漸上升,從而減小啟動(dòng)電流的沖擊。這種方式類似于軟啟動(dòng)技術(shù),能夠使電機(jī)平滑地從靜止?fàn)顟B(tài)過(guò)渡到正常運(yùn)轉(zhuǎn)狀態(tài)。
2. 控制啟動(dòng)加速度
除了減小啟動(dòng)電流沖擊外,PWM技術(shù)還可以通過(guò)控制啟動(dòng)加速度來(lái)實(shí)現(xiàn)電機(jī)的平滑啟動(dòng)。通過(guò)調(diào)整PWM信號(hào)的占空比變化率,可以控制電機(jī)輸入電壓或電流的上升速度,從而控制電機(jī)的啟動(dòng)加速度。當(dāng)占空比變化率較小時(shí),電機(jī)啟動(dòng)加速度較小,啟動(dòng)過(guò)程更加平穩(wěn);反之,當(dāng)占空比變化率較大時(shí),電機(jī)啟動(dòng)加速度較大,但可能會(huì)產(chǎn)生較大的機(jī)械沖擊。因此,在實(shí)際應(yīng)用中需要根據(jù)電機(jī)的具體特性和需求來(lái)選擇合適的占空比變化率。
三、PWM技術(shù)實(shí)現(xiàn)電機(jī)平滑停止的原理
1. 減小停止電流沖擊
與啟動(dòng)過(guò)程類似,電機(jī)在停止時(shí)也需要逐漸減小輸入電壓或電流,以避免產(chǎn)生較大的停止電流沖擊。PWM技術(shù)可以通過(guò)逐漸減小脈沖寬度(即占空比),使電機(jī)輸入電壓或電流逐漸下降,從而實(shí)現(xiàn)平滑停止。這種方式能夠減小電機(jī)在停止過(guò)程中的機(jī)械沖擊和振動(dòng),延長(zhǎng)電機(jī)壽命。
2. 控制停止減速度
除了減小停止電流沖擊外,PWM技術(shù)還可以通過(guò)控制停止減速度來(lái)實(shí)現(xiàn)電機(jī)的平滑停止。通過(guò)調(diào)整PWM信號(hào)的占空比變化率,可以控制電機(jī)輸入電壓或電流的下降速度,從而控制電機(jī)的停止減速度。當(dāng)占空比變化率較小時(shí),電機(jī)停止減速度較小,停止過(guò)程更加平穩(wěn);反之,當(dāng)占空比變化率較大時(shí),電機(jī)停止減速度較大,但可能會(huì)產(chǎn)生較大的機(jī)械沖擊。因此,在實(shí)際應(yīng)用中需要根據(jù)電機(jī)的具體特性和需求來(lái)選擇合適的占空比變化率。
四、PWM技術(shù)在電機(jī)控制中的具體實(shí)現(xiàn)方式
1. 硬件實(shí)現(xiàn)方式
硬件實(shí)現(xiàn)方式通常是通過(guò)專門(mén)的PWM發(fā)生器或微控制器(如單片機(jī)、DSP等)內(nèi)部的PWM模塊來(lái)產(chǎn)生PWM信號(hào)。這些設(shè)備內(nèi)部集成了定時(shí)器、比較器等關(guān)鍵部件,可以根據(jù)預(yù)設(shè)的參數(shù)(如頻率、占空比等)自動(dòng)生成PWM信號(hào)。用戶只需通過(guò)編程或配置相應(yīng)的寄存器即可實(shí)現(xiàn)對(duì)PWM信號(hào)的控制。
2. 軟件實(shí)現(xiàn)方式
軟件實(shí)現(xiàn)方式則是通過(guò)編寫(xiě)程序來(lái)模擬PWM信號(hào)的產(chǎn)生過(guò)程。這種方式通常適用于沒(méi)有內(nèi)置PWM發(fā)生器的微控制器或需要高度靈活性的應(yīng)用場(chǎng)景。在軟件實(shí)現(xiàn)中,可以通過(guò)定時(shí)器中斷或循環(huán)查詢等方式來(lái)定期改變輸出端口的電平狀態(tài),從而模擬出PWM信號(hào)的效果。然而,需要注意的是,軟件實(shí)現(xiàn)方式可能會(huì)受到微控制器處理速度和資源限制的影響,因此在高要求的應(yīng)用場(chǎng)景中可能不如硬件實(shí)現(xiàn)方式可靠。
五、PWM技術(shù)在電機(jī)平滑啟動(dòng)和停止中的優(yōu)勢(shì)
1. 精確控制
PWM技術(shù)能夠?qū)崿F(xiàn)對(duì)電機(jī)輸入電壓或電流的精確控制,從而實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩等參數(shù)的精確調(diào)節(jié)。這種精確控制能夠確保電機(jī)在啟動(dòng)和停止過(guò)程中保持平穩(wěn)的運(yùn)行狀態(tài),減小機(jī)械沖擊和振動(dòng)。
2. 高效節(jié)能
PWM技術(shù)通過(guò)調(diào)節(jié)占空比來(lái)控制電機(jī)的輸入電壓或電流,能夠在保證電機(jī)正常運(yùn)行的前提下降低能耗。在電機(jī)啟動(dòng)和停止過(guò)程中,通過(guò)逐漸改變占空比來(lái)減小電流沖擊和振動(dòng),可以進(jìn)一步提高系統(tǒng)的能效。
3. 可靠性高
PWM技術(shù)具有抗干擾能力強(qiáng)、穩(wěn)定性好等優(yōu)點(diǎn)。在復(fù)雜的電磁環(huán)境中,PWM信號(hào)能夠保持穩(wěn)定的性能表現(xiàn),確保電機(jī)控制系統(tǒng)的可靠運(yùn)行。
4. 靈活性強(qiáng)
PWM技術(shù)可以根據(jù)電機(jī)的具體特性和需求進(jìn)行靈活配置和調(diào)整。通過(guò)改變PWM信號(hào)的頻率、占空比等參數(shù),可以實(shí)現(xiàn)對(duì)電機(jī)不同運(yùn)行狀態(tài)的精確控制,滿足各種應(yīng)用場(chǎng)景的需求。
六、PWM技術(shù)在電機(jī)平滑啟動(dòng)和停止中的具體策略
1. 啟動(dòng)階段策略
- 初始占空比設(shè)定 :在電機(jī)啟動(dòng)之前,首先設(shè)定一個(gè)較低的初始占空比。這個(gè)值應(yīng)該足夠小,以確保啟動(dòng)電流不會(huì)過(guò)大,但又足夠使電機(jī)開(kāi)始轉(zhuǎn)動(dòng)。
- 占空比逐漸增加 :隨著電機(jī)開(kāi)始轉(zhuǎn)動(dòng),逐漸增加PWM信號(hào)的占空比。占空比增加的速率可以根據(jù)電機(jī)的特性和應(yīng)用需求進(jìn)行調(diào)整。較慢的增加速度可以確保啟動(dòng)過(guò)程更加平穩(wěn),但會(huì)延長(zhǎng)啟動(dòng)時(shí)間;較快的增加速度則可能產(chǎn)生較大的機(jī)械沖擊,但啟動(dòng)時(shí)間較短。
- 反饋控制 :為了進(jìn)一步提高啟動(dòng)過(guò)程的平滑性,可以采用反饋控制策略。通過(guò)檢測(cè)電機(jī)的轉(zhuǎn)速、電流等參數(shù),并根據(jù)這些參數(shù)實(shí)時(shí)調(diào)整PWM信號(hào)的占空比,以實(shí)現(xiàn)更精確的控制。
2. 停止階段策略
- 占空比逐漸減小 :在電機(jī)停止之前,逐漸減小PWM信號(hào)的占空比。與啟動(dòng)過(guò)程類似,占空比減小的速率也需要根據(jù)電機(jī)的特性和應(yīng)用需求進(jìn)行調(diào)整。較快的減小速度可能導(dǎo)致較大的停止沖擊,而較慢的減小速度則可以使停止過(guò)程更加平穩(wěn)。
- 制動(dòng)策略 :在某些情況下,為了快速停止電機(jī)并減少停止時(shí)間,可以采用制動(dòng)策略。這通常涉及在減小占空比的同時(shí),通過(guò)外部制動(dòng)裝置(如電磁制動(dòng)器)來(lái)輔助停止電機(jī)。
- 軟停止 :在某些應(yīng)用場(chǎng)合中,需要實(shí)現(xiàn)電機(jī)的軟停止(即平滑減速至停止)。這可以通過(guò)逐漸減小占空比,并可能結(jié)合電機(jī)的反電動(dòng)勢(shì)來(lái)實(shí)現(xiàn)。在軟停止過(guò)程中,電機(jī)的轉(zhuǎn)速會(huì)逐漸降低,直到最終停止,期間不會(huì)產(chǎn)生過(guò)大的機(jī)械沖擊。
七、PWM技術(shù)在電機(jī)控制中的挑戰(zhàn)與解決方案
挑戰(zhàn):
- 噪聲與振動(dòng) :盡管PWM技術(shù)能夠減小啟動(dòng)和停止過(guò)程中的機(jī)械沖擊,但在某些情況下仍可能產(chǎn)生噪聲和振動(dòng)。這可能是由于PWM信號(hào)的高頻特性或電機(jī)本身的固有振動(dòng)特性引起的。
- 電磁干擾 :PWM信號(hào)的高頻開(kāi)關(guān)特性可能產(chǎn)生電磁干擾(EMI),影響周圍電子設(shè)備的正常運(yùn)行。
- 控制精度與復(fù)雜性 :為了實(shí)現(xiàn)精確的電機(jī)控制,需要對(duì)PWM信號(hào)的頻率、占空比等參數(shù)進(jìn)行精確調(diào)節(jié)。這可能需要復(fù)雜的控制算法和高速的處理能力。
解決方案:
- 優(yōu)化PWM波形 :通過(guò)優(yōu)化PWM波形的形狀和頻率,可以減小噪聲和振動(dòng)的產(chǎn)生。例如,采用正弦波PWM(SPWM)或空間矢量PWM(SVPWM)等技術(shù)可以產(chǎn)生更平滑的電壓波形。
- 電磁兼容性設(shè)計(jì) :在電機(jī)控制系統(tǒng)中加入適當(dāng)?shù)碾姶偶嫒菪栽O(shè)計(jì),如濾波電路、屏蔽措施等,可以有效降低電磁干擾。
- 高級(jí)控制算法 :采用先進(jìn)的控制算法(如模糊控制、神經(jīng)網(wǎng)絡(luò)控制等)來(lái)提高控制精度和響應(yīng)速度。這些算法能夠?qū)崟r(shí)調(diào)整PWM信號(hào)的參數(shù),以適應(yīng)電機(jī)在不同工況下的需求。
八、結(jié)論與展望
PWM技術(shù)在電機(jī)平滑啟動(dòng)和停止中發(fā)揮著重要作用,通過(guò)精確調(diào)節(jié)電機(jī)輸入電壓或電流的波形,實(shí)現(xiàn)了對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩等參數(shù)的精確控制。隨著電子技術(shù)的不斷發(fā)展和控制理論的不斷完善,PWM技術(shù)將在電機(jī)控制領(lǐng)域得到更廣泛的應(yīng)用和發(fā)展。未來(lái),隨著新型半導(dǎo)體器件、智能控制算法和物聯(lián)網(wǎng)技術(shù)的不斷涌現(xiàn),PWM技術(shù)將為實(shí)現(xiàn)更高效、更智能、更環(huán)保的電機(jī)控制系統(tǒng)提供更加有力的支持。
-
PWM
+關(guān)注
關(guān)注
116文章
5427瀏覽量
218447 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9263瀏覽量
148607 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
402瀏覽量
37533
發(fā)布評(píng)論請(qǐng)先 登錄
一文詳解電動(dòng)機(jī)的順序啟動(dòng)和逆序停止
直流電機(jī)的啟動(dòng)與停止程序,大家有什么思路嗎?
電機(jī)驅(qū)動(dòng)pwm停止后還有輸出
STM32控制步進(jìn)電機(jī)的怎么實(shí)現(xiàn)平滑調(diào)速?
防爆電機(jī)的啟動(dòng)方式有哪些
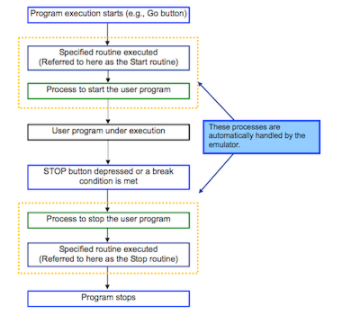
淺談E8a 仿真器的啟動(dòng)/停止功能
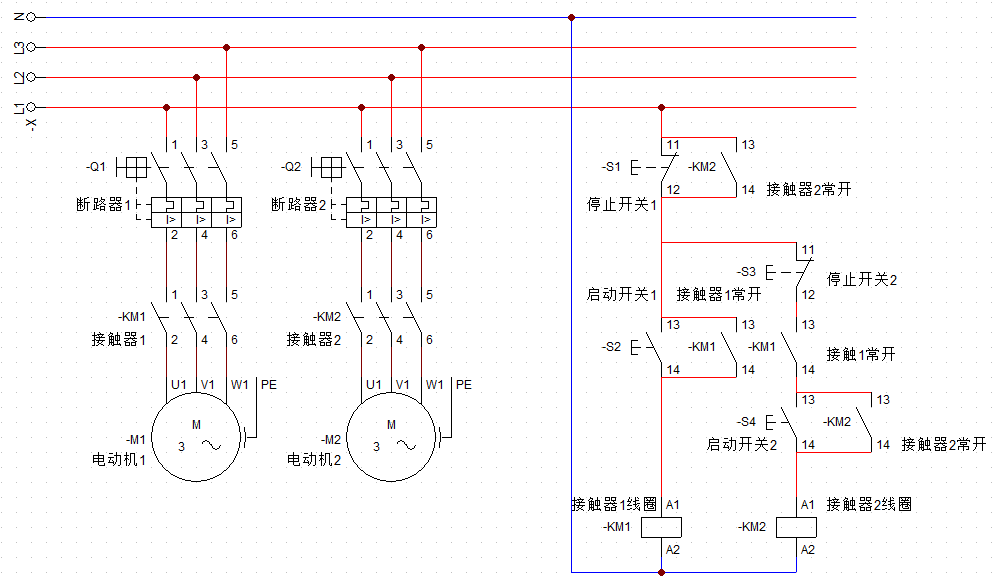
關(guān)于電機(jī)正反轉(zhuǎn)電路、電機(jī)順序啟動(dòng)、逆序停止的電路仿真圖分析
基于計(jì)數(shù)器按鈕控制的電機(jī)程序啟動(dòng)與停止





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論