 愛普生通過低噪音高級型號擴展了其1英寸平臺IMU產品線M-G370PDT
愛普生通過低噪音高級型號擴展了其1英寸平臺IMU產品線M-G370PDT
愛普生通過低噪音高級型號擴展了其1英寸平臺IMU產品線-M-G370PDT現已上市并批量生產,具有用戶可選擇的加速計輸出范圍和改進的陀螺儀輸出非線性-
精工愛普生公司(TSE:6724,“愛普生”)擴大了其慣性測量單元1(IMU)的陣容,配備了高性能的六自由度傳感器。新款M-G370PDT(以下簡稱“M-G370T”)是一款低噪音的高端車型,目前正在量產,并于2024年2月開始發貨。

愛普生的IMU于2011年首次推出,已被用于一系列客戶應用,從精準農業(GNSS2)、使用消費類工業組件的低地球軌道小型衛星3,到EO/IR相機萬向節4,再到天線平臺振動控制和穩定,因其出色的性能和質量而贏得了良好的聲譽。近年來,IMU的使用已擴展到航空測量和低地球軌道衛星視頻攝影等領域,對更精確的位置和姿態控制的需求日益增長。因此,對提供更高精度的IMU的需求正在上升,這在姿態控制中至關重要,尤其是噪聲性能。
M-G370T是一款一英寸型號,結合了M-G370PDS和M-G370PDG兩種當前型號的最佳功能,并提供低噪音和高精度測量。它具有與M-G370PDS(以下簡稱“M-G370S”)相同的0.03°/√h角度隨機游走5(輸出短期變化的重要IMU性能指標),并且具有高抗噪性,可以更準確地檢測設備和系統中發生的輕微姿態變化。此外,與M-G370PDG(以下簡稱“M-G370G”)一樣,新的IMU允許用戶選擇±8G或±16G的加速度計輸出范圍。它還在陀螺儀傳感器的滿量程上提供0.05%的非線性6。7這些功能使新的IMU能夠準確測量從慢到快的所有類型的運動。
通過擴大和增強其一英寸平臺產品陣容,愛普生為客戶提供了更多選擇,使他們能夠選擇功能和性能最適合其特定需求和應用的產品。
鑒于正在進行的社會和技術變革,愛普生認為,未來對精密傳感器的需求只會擴大。我們將繼續利用我們高效、緊湊和精確創新的理念,提供小型、輕便、低功耗的傳感系統,提供卓越的精度、高穩定性和低噪音,為客戶的產品和服務做出重大貢獻。
產品特點
一英寸平臺(24 x 24 x 10 mm3)
與M-G370S和M-G370G交叉兼容,大大降低了客戶開發成本和評估時間
角度隨機游走0.03°/√h
用戶可選擇的加速度計輸出范圍為±8G或±16G
陀螺儀傳感器的全量程非線性為0.05%
低電流消耗:16mA
產品應用
使用消費類工業部件、EO/IR相機萬向節、天線等對低地球軌道小型衛星進行穩定控制。
工業設備的振動、角度、軌跡測量等。
導航系統(GNSS、INS8、高精度定位器)等。
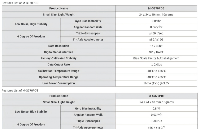
M-G370T和1英寸平臺產品通用技術條件
| Performance&Function/ProductName | New Product | Current Product | Current Product | |
| New premium low-noise model | Premium low-noise model | High-spec model | ||
| Product | M-G370T | M-G370S | M-G370G | |
| Output range | Gyroscopic sensor | ±200°/s | ±200°/s | ±450/s |
| Accelerometer | ±16G/±8 G | ±10G | ±16G/±8 G | |
| Accuracy & stability | Gyro bias instability? | 0.8/h | ||
| Angle random walk | 0.03 °Nh | 0.03 %Nh | 0.06 °Wh | |
| Gyro non-linearity | 0.05% of Full Scale | 0.05% of±130/s | 0.05% of Full Scale | |
| Initial bias | Gyroscopic sensor | ±360 °/h,σ(-40℃ to +85℃) | ||
| Accelerometer | +2 mG,o | |||
| Interfaces | SPI&UART | |||
| Output resolution | 32 bit | |||
| Maximum data output rate | 2,000 Hz | |||
| Operating temperature range | -40℃to+85℃ | |||
| Currentconsumption | 16 mA (3.3V) | |||
| Size | 24×24×10 mm3 | |||
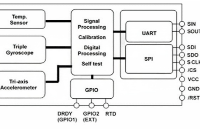
1慣性測量單元(IMU)
IMU是一種用于感測慣性運動的設備。它由三軸角速度傳感器和三軸加速度計組成。
2全球導航衛星系統(GNSS)
一種衛星系統,用于精確定位世界任何地方的地理位置
3本產品和其他愛普生IMU不符合太空使用標準。
4 EO/IR相機云臺
電光紅外攝像系統
5角隨機游走
斜率為-1/2的Allan方差部分稱為角度隨機游走。由于與白噪聲存在相關性,增加平均時間會使平均時間的-1/2處的值減小。
6非線性
陀螺儀傳感器或加速度計的輸出與輸入的近似直線的最大偏差。它通常表示為滿量程的百分比。
7陀螺儀傳感器(角速度傳感器)
測量單位時間內物體相對于參考軸的旋轉角度(角速度)
8英寸
慣性導航系統
9偏差不穩定性
Allan方差*中代表水平(零冪)特性的部分稱為偏置不穩定性。它與1/f噪聲相關,是傳感器電位的重要指標之一。
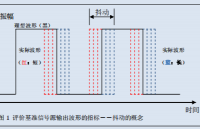
*艾倫方差
作為傳感器性能的指標,Allan方差表示靜態輸出的穩定性。橫軸表示數據的平均時間,縱軸表示平均值除以平均時間后的分布。
已知Allan方差中出現的特征的斜率為-1、-1/2、0、1/2和1次冪斜率,Allan方差與噪聲密度相關,噪聲密度是頻率。Allan方差是一個用時間表示的指標。
值越小,穩定性越高,性能越好。
-
陀螺儀
+關注
關注
44文章
833瀏覽量
99742 -
愛普生
+關注
關注
0文章
470瀏覽量
22604 -
IMU
+關注
關注
6文章
340瀏覽量
46531
發布評論請先 登錄
愛普生M-G370PDT和M-G370PDG穩定云臺的理想之選
愛普生M-G366PDG慣性測量單元IMU成為動中通天線系統的理想選擇

愛普生慣性測量單元M-G370PDF可廣泛用于各工業領域

EPSON慣性測量單元M-G370PDF用于管道機器人巡檢
愛普生M-G365PDC1/M-G365PDF1六軸陀螺儀

愛普生M-G370PDT0(X2G000221000200)慣性測量模塊
愛普生M-G330PDG0慣性測量模塊選型

愛普生防水防塵慣性測量模塊M-G552系列選型

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

EPSON新品IMU傳感器M-G570PR投產,功能更強大!

愛普生將大規模生產M-G570PR,這是一款采用多傳感器技術的高精度、低噪聲IMU

M-G370/M-G365可應用于AGV搬運機器人,AGV小車的慣性測量單元IMU

中國首條12英寸MEMS量產線今天投產!5年370億兩座晶圓廠12萬片每月!






 工商網監
工商網監
評論