") 從硬件和軟件兩方面談一談自動(dòng)駕駛汽車所涉及的技術(shù)
從硬件和軟件兩方面談一談自動(dòng)駕駛汽車所涉及的技術(shù)
自動(dòng)駕駛是一個(gè)龐大而且復(fù)雜的工程,涉及的技術(shù)很多。本文從硬件和軟件兩方面談一談自動(dòng)駕駛汽車所涉及的技術(shù)。
一、硬件
先看個(gè)圖,下圖基本包含了自動(dòng)駕駛研究所需要的各種硬件。
當(dāng)然,這么多傳感器并不一定會(huì)同時(shí)出現(xiàn)在一輛車上。某種傳感器存在與否,取決于這輛車需要完成什么樣的任務(wù)。如果只需要完成高速公路的自動(dòng)駕駛,類似Tesla 的 AutoPilot 功能,那根本不需要使用到激光傳感器;如果你需要完成城區(qū)路段的自動(dòng)駕駛,僅靠視覺是很困難的。
所以,自動(dòng)駕駛系統(tǒng)工程師要以任務(wù)為導(dǎo)向,進(jìn)行硬件的選擇和成本控制。
汽車
既然要做自動(dòng)駕駛,汽車當(dāng)然是必不可少的東西。從經(jīng)驗(yàn)來看,做開發(fā)時(shí),能不選純汽油車就別選。
一方面是整個(gè)自動(dòng)駕駛系統(tǒng)所消耗的電量巨大,混動(dòng)和純電動(dòng)在這方面具有明顯優(yōu)勢。另一方面是是發(fā)動(dòng)機(jī)的底層控制算法相比于電機(jī)復(fù)雜太多,與其花大量時(shí)間在標(biāo)定和調(diào)試底層上,不如直接選用電動(dòng)車研究更高層的算法。
在前期算法預(yù)研階段,推薦使用工控機(jī)(Industrial PC,IPC)作為最直接的控制器解決方案。因?yàn)楣た貦C(jī)相比于嵌入式設(shè)備更穩(wěn)定、可靠,社區(qū)支持及配套的軟件也更豐富。
當(dāng)算法研究得較為成熟時(shí),就可以將嵌入式系統(tǒng)作為控制器,比如Audi和TTTech共同研發(fā)的zFAS,目前已經(jīng)應(yīng)用在最新款A(yù)udi A8上量產(chǎn)車上了。
CAN卡
工控機(jī)與汽車底盤的交互必須通過專門的語言——CAN。從底盤獲取當(dāng)前車速及方向盤轉(zhuǎn)角等信息,需要解析底盤發(fā)到CAN總線上的數(shù)據(jù);工控機(jī)通過傳感器的信息計(jì)算得到方向盤轉(zhuǎn)角以及期望車速后,也要通過 CAN卡 將消息轉(zhuǎn)碼成底盤可以識別的信號,底盤進(jìn)而做出響應(yīng)。
CAN卡可以直接安裝在工控機(jī)中,然后通過外部接口與CAN總線相連。
全球定位系統(tǒng)(GPS)+慣性測量單元(IMU)
人類開車,從A點(diǎn)到B點(diǎn),需要知道A點(diǎn)到B點(diǎn)的地圖,以及自己當(dāng)前所處的位置,這樣才能知道行駛到下一個(gè)路口是右轉(zhuǎn)還是直行。
無人駕駛系統(tǒng)也一樣,依靠GPS+IMU就可以知道自己在哪(經(jīng)緯度),在朝哪個(gè)方向開(航向),當(dāng)然IMU還能提供諸如橫擺角速度、角加速度等更豐富的信息,這些信息有助于自動(dòng)駕駛汽車的定位和決策控制。
感知傳感器
相信大家對車載傳感器都耳熟能詳了。感知傳感器分為很多種,包括視覺傳感器、激光傳感器、雷達(dá)傳感器等。
視覺傳感器就是攝像頭,攝像頭分為單目視覺,雙目視覺。比較知名的視覺傳感器提供商有以色列的Mobileye,今年已被intel收購。
激光傳感器分為單線,多線一直到64線。每多一線,成本上漲1萬RMB,當(dāng)然相應(yīng)的檢測效果也更好。比較知名的激光傳感器提供商有美國的Velodyne和Quanergy,德國的Ibeo等。
雷達(dá)傳感器是車廠Tier1的強(qiáng)項(xiàng),因?yàn)槔走_(dá)傳感器已經(jīng)在汽車上得到了廣泛使用。知名的供應(yīng)商當(dāng)然是博世、德爾福、電裝等。
硬件部分總結(jié)
組裝一套可以完成某項(xiàng)功能的自動(dòng)駕駛系統(tǒng)需要非常豐富的經(jīng)驗(yàn),并且要對各傳感器的性能邊界及控制器計(jì)算能力了如指掌。優(yōu)秀的系統(tǒng)工程師能在滿足功能的要求下將成本控制在最低,使其量產(chǎn)、落地的可能性更大。
二、軟件
軟件包含四層:感知、融合、決策、控制。各個(gè)層級之間都需要編寫代碼,去實(shí)現(xiàn)信息的轉(zhuǎn)化。
采集
傳感器跟我們的PC或者嵌入式模塊通信時(shí),會(huì)有不同的傳輸方式。
比如我們采集來自攝像機(jī)的圖像信息,有的是通過千兆網(wǎng)卡實(shí)現(xiàn)的通信,也有的是直接通過視頻線進(jìn)行通信的。再比如某些毫米波雷達(dá)是通過CAN總線給下游發(fā)送信息的,因此我們必須編寫解析CAN信息的代碼。
不同的傳輸介質(zhì),需要使用不同的協(xié)議去解析這些信息,這就是所謂的“驅(qū)動(dòng)層”。通俗地講就是把傳感器采集到的信息全部拿到,并且編碼成團(tuán)隊(duì)可以使用的數(shù)據(jù)。
預(yù)處理
傳感器的信息拿到后會(huì)發(fā)現(xiàn)不是所有信息都是有用的。傳感器層將數(shù)據(jù)以一幀一幀、固定頻率發(fā)送給下游,但下游是無法拿每一幀的數(shù)據(jù)去進(jìn)行決策或者融合的。為什么?
因?yàn)閭鞲衅鞯臓顟B(tài)不是100%有效的,如果僅根據(jù)某一幀的信號去判定前方是否有障礙物(有可能是傳感器誤檢了),對下游決策來說是極不負(fù)責(zé)任的。因此上游需要對信息做預(yù)處理,以保證車輛前方的障礙物在時(shí)間維度上是一直存在的,而不是一閃而過。
這里就會(huì)使用到智能駕駛領(lǐng)域經(jīng)常使用到的一個(gè)算法——卡爾曼濾波。
坐標(biāo)轉(zhuǎn)換
坐標(biāo)轉(zhuǎn)換在智能駕駛領(lǐng)域十分重要。
傳感器是安裝在不同地方的,比如超聲波雷達(dá)是布置在車輛周圍的;當(dāng)車輛右方有一個(gè)障礙物,距離這個(gè)超聲波雷達(dá)有3米,那么我們就認(rèn)為這個(gè)障礙物距離車有3米嗎?
并不一定!因?yàn)闆Q策控制層做車輛運(yùn)動(dòng)規(guī)劃時(shí),是在車體坐標(biāo)系下做的(車體坐標(biāo)系一般以后軸中心為O點(diǎn)),所以最終所有傳感器的信息,都是需要轉(zhuǎn)移到自車坐標(biāo)系下的。
因此感知層拿到3m的障礙物位置信息后,必須將該障礙物的位置信息轉(zhuǎn)移到自車坐標(biāo)系下,才能供規(guī)劃決策使用。
同理,攝像機(jī)一般安裝在擋風(fēng)玻璃,中后視鏡處,拿到的數(shù)據(jù)也是基于攝像機(jī)坐標(biāo)系的,給下游的數(shù)據(jù),同樣需要轉(zhuǎn)換到自車坐標(biāo)系下。
什么是自車坐標(biāo)系?請拿出你的右手,以大拇指 → 食指 → 中指 的順序開始念 X、Y、Z。然后把手握成如下形狀:
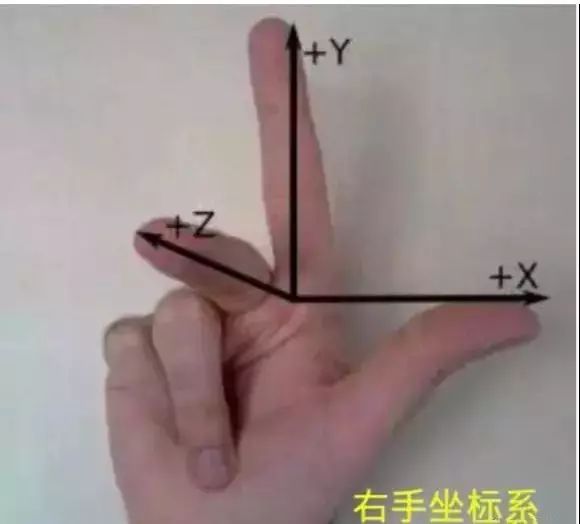
把三個(gè)軸的交點(diǎn)(食指根部)放在自車坐標(biāo)系后軸中心,Z軸指向車頂,X軸指向車輛前進(jìn)方向。
各個(gè)團(tuán)隊(duì)可能定義的坐標(biāo)系方向不一致,只要開發(fā)團(tuán)隊(duì)內(nèi)部統(tǒng)一即可。
信息融合
信息融合是指把相同屬性的信息進(jìn)行多合一操作。
比如攝像機(jī)檢測到了車輛正前方有一個(gè)障礙物,毫米波也檢測到車輛前方有一個(gè)障礙物,激光雷達(dá)也檢測到前方有一個(gè)障礙物,而實(shí)際上前方只有一個(gè)障礙物,所以我們要做的是把多傳感器下這輛車的信息進(jìn)行一次融合,以此告訴下游,前面有一輛車,而不是三輛車。
決策規(guī)劃
這一層次主要設(shè)計(jì)的是拿到融合數(shù)據(jù)后,如何正確做規(guī)劃。規(guī)劃包含縱向控制和橫向控制。縱向控制即速度控制,表現(xiàn)為 什么時(shí)候加速,什么時(shí)候制動(dòng)。橫向控制即行為控制,表現(xiàn)為 什么時(shí)候換道,什么時(shí)候超車等
軟件長什么樣子?
自動(dòng)駕駛系統(tǒng)中的部分軟件看起來和下面類似。

軟件的名字反映了該軟件的實(shí)際作用——
app_driver_camera 攝像機(jī)驅(qū)動(dòng)
app_driver_hdmap 高精度地圖驅(qū)動(dòng)
app_driver_ins 慣導(dǎo)驅(qū)動(dòng)
app_driver_lidar 激光傳感器驅(qū)動(dòng)
app_driver_mwr 毫米波傳感器驅(qū)動(dòng)
app_fusion_freespace 自由行駛區(qū)域融合
app_fusion_lane 車道線融合
app_fusion_obstacle 障礙物融合
app_planning&decision 規(guī)劃決策
然而實(shí)際上攻城獅們會(huì)編寫一些其他軟件用于自己的調(diào)試工作,比如記錄數(shù)據(jù)和回放數(shù)據(jù)的工具。

還有用于傳感器信息顯示的可視化程序,類似下圖的效果。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14240瀏覽量
169874
原文標(biāo)題:自動(dòng)駕駛汽車涉及了這些技術(shù)...
文章出處:【微信號:chuanglai_2015,微信公眾號:創(chuàng)來科技ADAS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
谷歌的自動(dòng)駕駛汽車是醬紫實(shí)現(xiàn)的嗎?
汽車自動(dòng)駕駛技術(shù)
自動(dòng)駕駛真的會(huì)來嗎?
自動(dòng)駕駛的到來
自動(dòng)駕駛汽車時(shí)代:天線測量與模擬比任何時(shí)候都來得關(guān)鍵
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車的處理能力怎么樣?
無人駕駛汽車的關(guān)鍵技術(shù)是什么?
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
詳細(xì)說明多項(xiàng)自動(dòng)駕駛底層軟件技術(shù)
基于自動(dòng)駕駛涉及的軟硬件的簡單介紹
從硬軟件兩方面談自動(dòng)駕駛這個(gè)龐大而且復(fù)雜的工程所涉及的技術(shù)
從AppleCar來談一談自動(dòng)駕駛的軟硬件要求
自動(dòng)駕駛系統(tǒng)涉及哪些技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論