 要掌握PID算法需要深刻理解反饋機構和執行機構以及了解自身特點
要掌握PID算法需要深刻理解反饋機構和執行機構以及了解自身特點
PID算法,不管是原理上,還是代碼上都比較簡單。主要運用在電機控制、開關電源、電源管理芯片等領域。
一般《自動控制原理》上給的是位置式算法,如下圖所示。
原因在于你對這個系統的反饋機構理解得不夠。
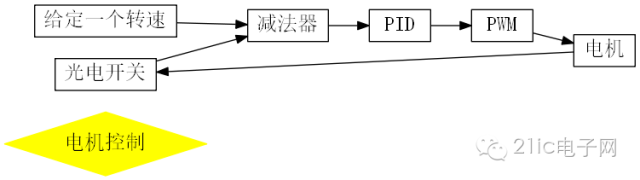
比如,716空心杯電機,設定在100轉/秒,但是你卻用了50M時鐘讓PID算法工作,假設PID是全并行的(數據吞吐量也達到50M)。
這時,不管你怎樣調參數,電機都不受控制,一下子很快,一下子很慢。靜下來想想,不難發現問題。
假設電機瞬時轉速是101轉/秒,光電開關大概每隔4.95毫秒才反饋一個速度量過來,在這期間是沒有反饋的。
設定的轉速是100轉/秒,用工作在50M全并行的增量式PID算法,在4.95毫秒內,不斷地累積1轉/秒的誤差,期間被PID算法作用了247.5次!
也就是說,因為PID的工作頻率太高,積累誤差的速率太快(從另一個角度來看就是反饋機構太慢),所以電機不受控制,這時,你把PID的工作頻率降下來,就會發現,電機漸漸地受控制了。
下面給一個在FPGA中使用PID算法做電機控制的完整框圖。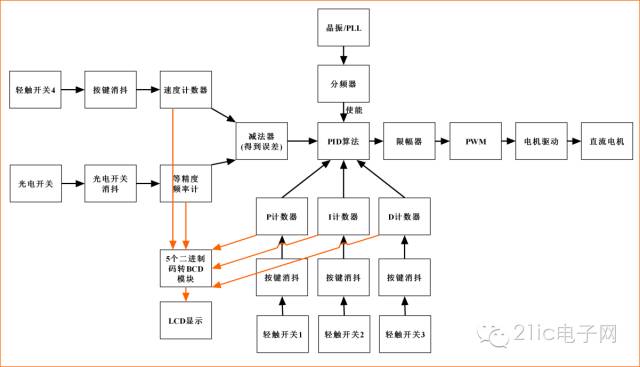
綜上所述,控制類算法,除了要關注算法本身的特點以外,還要深刻理解反饋機構和執行機構。
BTW,一般來說,電機控制用PI或者PD控制就可以了,如果用PID三個環節的話,一來參數不容易調節,二來容易自激,當然也不排除某些特殊場合需要用PID三個環節,甚至還會用到三環控制(速度環、相位環、電流環)。此外,除了PID以外,常用的控制類算法還有模糊控制、MPC(模型預測控制)算法。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PID
+關注
關注
37文章
1480瀏覽量
87516
原文標題:要掌握PID算法 要深刻理解反饋機構和執行機構
文章出處:【微信號:weixin21ic,微信公眾號:21ic電子網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
蓄電容執行機構的新突破
情況以及閥門的運轉狀況。 可在軟件上讀出的信息有: 運轉狀況:通電次數、停電切斷次數、信號切斷次數、電機運轉累計時間、電機運轉次數(1s以上及以下);環境參數有:執行機構內部最高
發表于 06-09 16:32
執行機構的新突破
溫度范圍內,60℃以上,-10℃以下);異常次數:超載錯誤、運轉超時間;以及用圖表形式顯示的執行機構內部溫度圖,電機電流圖,蓄電容電壓圖等等。 通過這些參數,用戶可以清晰的了解到執行機構
發表于 07-25 18:58
用直流電機控制執行機構,執行機構如果出現抖動,如何用程序判定?
用直流電機控制執行機構,執行機構如果出現抖動,如何用程序判定(判定方法)?機械原因的抖動和反饋信號原因產生的抖動!
發表于 02-23 09:11
消息隊列執行機構運動一直不停止
停止,停3s后繼續完成同樣的任務。我采用了任務1控制小車運動,用消息隊列給執行機構發送消息,但是執行機構運動一直不停止,小車停止后不再繼續運行。麻煩給一下解決思路或建議,謝謝。補充:停幾秒只是一個假設實際中不是那么精準,要完成動
發表于 04-14 04:35
電動執行機構傳遞函數的研究
介紹了一種獲得電動執行機構傳遞函數的新方法。該方法從分析電動執行機構的各個組成部分出發,最終推導出以供電電壓為輸入、反饋電壓為輸出的開環傳遞函數,并通過求解微
發表于 03-17 15:36
?16次下載
基于DSP的電動執行機構的設計與實現
智能電動執行機構的研究是工業控制領域的熱點問題之一。本文論述了一種基于DSP 的電動執行機構的研究工作。本電動執行機構采用三相混合式步進電動機為動力、以DSP 為控制
發表于 01-13 17:19
?18次下載
基于CAN總線的電動執行機構的設計
智能電動執行機構實現遠程監控是目前研究的熱點。本文介紹了基于CAN總線通訊的智能電動執行機構的設計思路及實現方法,具體介紹了電動執行機構的控制電路、驅動電路及CAN總線
發表于 02-21 14:18
?25次下載
基于DSP實現的SDZ智能電動執行機構
論述了SDZ智能電動執行機構的設計與開發。結合SDZ執行機構的功能特點,介紹了智能電動執行機構的基本功能。給出了系統的硬件結構以及程序的總體
發表于 03-02 13:52
?21次下載
執行機構和定位驅動器介紹
對于執行機構最廣泛的定義是:一種能提供直線或旋轉運動的驅動裝置,它利用某種驅動能源并在某種控制信號作用下工作。因為越來越多的工廠采用了自動化控制,人工操作被機械或自動化設備所替代,人們要求執行機構
發表于 10-24 16:39
?3次下載
基于微機技術和執行器技術為一體的電動執行機構的設計方案
提出一種新型電動執行機構的設計方案,詳細介紹了該執行機構各功能元件的選型與設計、閥位及速度控制原理以及各種關鍵問題的解決方法。該執行機構將閥門、伺服電機、控制器合為一體,采用8031單
發表于 01-05 09:06
?1883次閱讀





 工商網監
工商網監
評論