 淺談步進電機控制策略方式有哪些?
淺談步進電機控制策略方式有哪些?

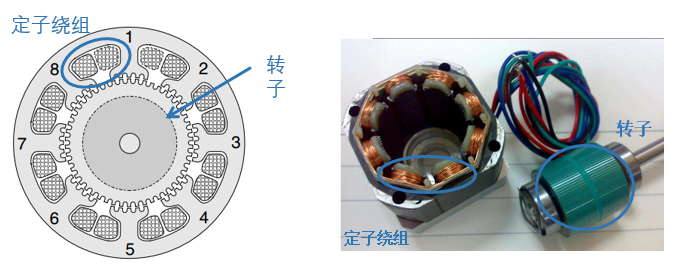
步進電機是一種將電脈沖信號轉換為角位移或線位移的電機,廣泛應用于各種自動化控制系統中。步進電機的控制策略是實現精確運動控制的關鍵,以下是一些常見的步進電機控制策略方式:
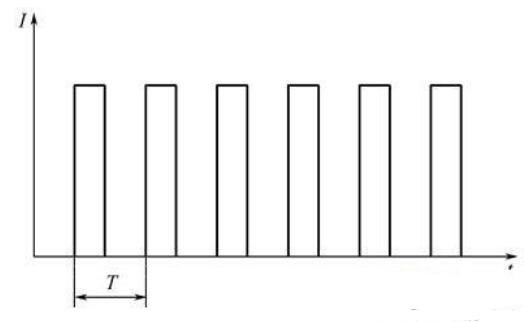
- 脈沖序列控制 :
- 全步控制 :每個脈沖使電機轉動一個步距角,適用于對精度要求不高的場合。
- 半步控制 :每個脈沖使電機轉動半個步距角,可以提高分辨率。
- 微步控制 :通過細分步距角,實現更精細的控制,通常需要微步驅動器。
- 方向控制 :
- 步進電機的轉動方向由輸入脈沖的順序決定,正序脈沖使電機正轉,反序脈沖使電機反轉。
- 加減速控制 :
- 恒速控制 :電機在整個運動過程中保持恒定速度。
- 變速控制 :通過改變脈沖頻率實現加速和減速,以適應不同的運動需求。
- 電流控制 :
- 恒流控制 :保持電機電流恒定,適用于負載變化不大的場合。
- 恒功率控制 :在不同速度下調整電流,以保持電機的輸出功率恒定。
- 位置控制 :
- 速度控制 :
- 通過測量電機的轉速并反饋調整,實現對速度的精確控制。
- 力矩控制 :
- 通過測量電機的力矩并反饋調整,實現對力矩的精確控制。
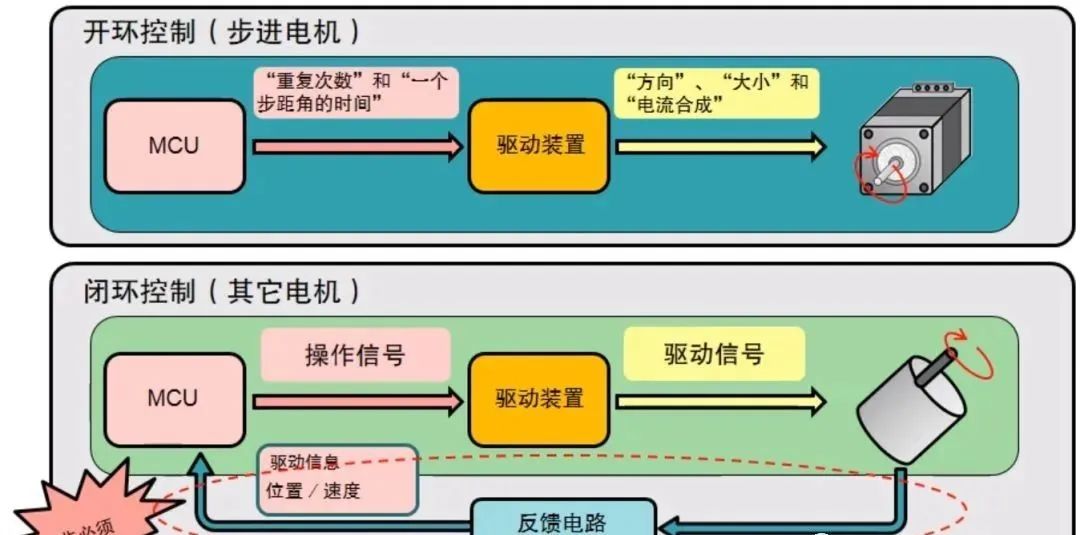
- 開環控制 :
- 不依賴于電機的實際運動狀態,只根據輸入信號控制電機。
- 閉環控制 :
- 利用傳感器反饋電機的實際運動狀態,通過控制算法調整輸入信號,實現精確控制。
- 混合控制 :
- 結合開環和閉環控制的優點,提高系統的穩定性和響應速度。
- 自適應控制 :
- 根據系統的動態特性和環境變化,自動調整控制參數。
- 模糊控制 :
- 利用模糊邏輯處理不確定性和非線性問題,適用于復雜系統的控制。
- 神經網絡控制 :
- 模仿人腦的神經網絡結構,通過學習實現對步進電機的控制。
- PID控制 :
- 比例-積分-微分控制,通過調整比例、積分、微分系數實現對電機的精確控制。
- 前饋控制 :
- 根據系統的輸入和輸出關系,預測未來的輸出并進行控制。
- 滑模控制 :
- 通過設計滑模面和控制律,使系統狀態在滑模面上滑動,達到控制目的。
- 魯棒控制 :
- 在面對系統參數變化和外部干擾時,保持系統的穩定性和性能。
- 預測控制 :
- 根據系統的動態模型,預測未來的行為并進行控制。
- 自學習控制 :
- 系統能夠根據歷史數據自動調整控制策略,以適應新的工作環境。
- 多電機協同控制 :
- 在多電機系統中,通過協調控制實現整體的運動控制。
步進電機的控制策略選擇取決于應用的具體需求,如精度、速度、力矩、成本和系統的復雜性。在設計控制系統時,需要綜合考慮這些因素,以實現最佳的控制效果。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電流
+關注
關注
40文章
7143瀏覽量
135295 -
驅動器
+關注
關注
54文章
8711瀏覽量
150287 -
步進電機
+關注
關注
152文章
3171瀏覽量
149951 -
自動化控制
+關注
關注
4文章
252瀏覽量
20932
發布評論請先 登錄
相關推薦
熱點推薦
雙極性步進電機的基本組件有哪些
在如今這個智能時代,步進電機因其特有的開環位置控制性能而被廣泛應用。各設備在步進電機轉動的過程中,對它輸出力矩的平滑性
步進電機控制方式
步進電機受電脈沖信號控制,電脈沖信號的產生、分配、放大全靠電子元器件的動作來實現。由于脈沖控制信號的驅動能力一般都很弱,因此必須有功率放大驅動電路。


步進電機如何自適應控制?步進電機如何細分驅動控制?
是一種智能控制方法,它可以根據系統參數的變化和外部干擾自動調整控制策略,以實現對系統的穩定和精確控制。在步進





 工商網監
工商網監
評論