") 無人機(jī)超聲波傳感器在無人機(jī)避障中的應(yīng)用
無人機(jī)超聲波傳感器在無人機(jī)避障中的應(yīng)用
近年來無人機(jī)市場飛速增長,消費(fèi)類無人機(jī)也越來越受歡迎,例如無人機(jī)多用于拍攝震撼的片段、運(yùn)送救援物資,其中多數(shù)無人機(jī)使用各種傳感技術(shù)實現(xiàn)自主導(dǎo)航、碰撞檢測。隨著無人機(jī)的功能不斷增加,GPS傳感器、紅外傳感器、氣壓傳感器、超聲波傳感器越來越多地被用到無人機(jī)上。而你又是否知道,眾多傳感器中超聲波傳感尤其有助于無人機(jī)著陸、懸停、地面跟蹤。
超聲波原理
超聲波可以穿過各種介質(zhì)(氣體、液體、固體)來檢測聲阻抗不匹配的物體。聲速是聲波在彈性介質(zhì)中傳播時每單位時間的距離。例如,在20°C (68°F)的干燥空氣中,聲速為343米每秒(1,125英尺每秒)。空氣中的超聲波衰減隨著頻率和濕度的增加而增加。因此,由于過度的路徑損耗/吸收,空氣耦合超聲波通常被限制在500kHz以下的頻率。
為什么要將超聲波感應(yīng)用于無人機(jī)著陸、懸停、地面跟蹤?
無人機(jī)降落輔助是無人機(jī)所具有的一項功能,可以檢測無人機(jī)底部與著陸區(qū)域的距離,判定著陸點是否安全,然后緩慢下降到著陸區(qū)域。盡管GPS監(jiān)測、氣壓傳感和其他傳感技術(shù)有助于著陸過程,但在這個過程中,超聲波傳感是無人機(jī)的主要和最準(zhǔn)確的判斷依據(jù)。大多數(shù)無人機(jī)中還有懸停和地面跟蹤模式,主要用于捕捉連續(xù)鏡頭和陸地導(dǎo)航,其中超聲波傳感器有助于將無人機(jī)保持在高于地面的恒定高度。
無人機(jī)地面跟蹤和著陸的共同要求是能夠可靠地檢測到距離地面5米高的距離。假設(shè)信號調(diào)節(jié)和處理正確,40-60kHz范圍內(nèi)的超聲波傳感器通常可以滿足這個范圍。
超聲波傳感可以檢測其他技術(shù)難以解決的的表面。例如,無人機(jī)經(jīng)常會遇到建筑物上的玻璃窗和其他玻璃表面。光傳感技術(shù)有時會穿過玻璃和其他透明材料,這對無人機(jī)懸停在玻璃建筑物上造成困難。超聲波則能夠可靠地反射出玻璃表面。
雖然眾多的傳感技術(shù)可以檢測物體的接近程度,但是超聲波傳感可在無人機(jī)著陸時的探測距離,然而無人機(jī)下降的時候必須考慮與地面的實時距離。每一克無人機(jī)的機(jī)身重量都能影響無人機(jī)能在空中的續(xù)航時間,Maxbotix設(shè)計的無人機(jī)超聲波傳感器 XL-MaxSonar-WR系列 - MB7052具有高性能、小體積、低成本、易于使用和輕量級的特點。我們推薦無人機(jī)超聲波傳感器重約5.8克。這款無人機(jī)超聲波傳感器在方案成本以及不同表面的可靠性方面良好運(yùn)行。
無人機(jī)應(yīng)用日趨廣泛避障技術(shù)實現(xiàn)有哪些方式?接著我們在了解一下傳感器在無人機(jī)避障中的應(yīng)用
避障技術(shù)作為增加無人機(jī)安全飛行的保障也隨著技術(shù)的發(fā)展日新月異。「避障功能」作為無人機(jī)在飛行過程中,通過其傳感器收集周邊環(huán)境的信息,測量距離從而做出相對應(yīng)的動作指令,從而達(dá)到「避障」的作用,帶來的最直接的好處就是,以往一些人為疏忽造成的撞擊,現(xiàn)在都能經(jīng)由避障功能去避免,既保障了無人機(jī)飛行安全的同時,也避免了對周圍人員財產(chǎn)的損害,讓飛無人機(jī)的門檻進(jìn)一步得到了降低。目前,無人機(jī)的避障技術(shù)中最為常見的是超聲波傳感器、紅外線傳感器、激光傳感器以及視覺傳感器。
超聲波避障:
超聲波其實就是聲波的一種,因為頻率高于20kHz,所以人耳聽不見,并且指向性更強(qiáng)。

超聲波測距的原理比紅外線更加簡單,因為聲波遇到障礙物會反射,而聲波的速度已知,所以只需要知道發(fā)射到接收的時間差,就能輕松計算出測量距離,再結(jié)合發(fā)射器和接收器的距離,就能算出障礙物的實際距離,如下圖所示。

超聲波測距相比紅外測距,價格更加便宜,相應(yīng)的感應(yīng)速度和精度也遜色一些。同樣,由于需要主動發(fā)射聲波,所以對于太遠(yuǎn)的障礙物,精度也會隨著聲波的衰減而降低,此外,對于海綿等吸收聲波的物體或者在大風(fēng)干擾的情況下,超聲波將無法工作。
HRLV - maxsonar- EZ0在HRLV - maxsonar- EZ傳感器線的任何單元中都有最寬最敏感的光束模式。這使得HRLV - maxsonar- EZ0在高靈敏度,寬波束,或人們檢測的地方是一個很好的選擇。
紅外線傳感器避障
無人機(jī)避障上的應(yīng)用,紅外線避障的常見實現(xiàn)方式就是「三角測量原理」。
紅外感應(yīng)器包含紅外發(fā)射器與CCD檢測器,紅外線發(fā)射器會發(fā)射紅外線,紅外線在物體上會發(fā)生反射,反射的光線被CCD檢測器接收之后,由于物體的距離D不同,反射角度也會不同,不同的反射角度會產(chǎn)生不同的偏移值L,知道了這些數(shù)據(jù)再經(jīng)過計算,就能得出物體的距離了。
激光傳感器
激光避障與紅外線類似,也是發(fā)射激光然后接收。不過激光傳感器的測量方式很多樣,有類似紅外的三角測量,也有類似于超聲波的時間差+速度。但是由于激光的波束極窄,可以同時使用多束激光組成陣列雷達(dá),近年來此技術(shù)逐漸成熟,多用于自動駕駛車輛上,但由于其體積龐大,價格昂貴,故不太適用于無人機(jī)。
視覺傳感器
視覺避障技術(shù),解決機(jī)器人如何“看”的問題視覺避障技術(shù),視覺識別系統(tǒng)通常來說可以包括一個或兩個攝像頭。單一的照片只具有二維信息,猶如2D電影,并無直接的空間感,只有靠我們自己依靠“物體遮擋、近大遠(yuǎn)小”等生活經(jīng)驗?zāi)X補(bǔ)。故單一的攝像頭獲取到的信息及其有限,并不能直接得到我們想要的效果當(dāng)然類比到機(jī)器視覺中,單個攝像頭的圖片信息無法獲取到場景中每個物體與鏡頭的距離關(guān)系,即缺少第三個維度。
-
無人機(jī)
+關(guān)注
關(guān)注
230文章
10663瀏覽量
185017 -
激光傳感器
+關(guān)注
關(guān)注
2文章
158瀏覽量
21726 -
超聲波傳感器
+關(guān)注
關(guān)注
18文章
601瀏覽量
36551
發(fā)布評論請先 登錄
肇觀電子兩款無人機(jī)視覺避障模組量產(chǎn)交付
無人機(jī)巡檢系統(tǒng)守護(hù)未來的空中衛(wèi)士
《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實戰(zhàn)》系列課程課件匯總
無人機(jī)傳感器線圈的設(shè)計與制造工藝詳解
科達(dá)嘉電感在無人機(jī)系統(tǒng)中的應(yīng)用
微秒級實時在無人機(jī)控制中的重要性
舵機(jī)在無人機(jī)中的作用
霍爾傳感器在無人機(jī)中的應(yīng)用

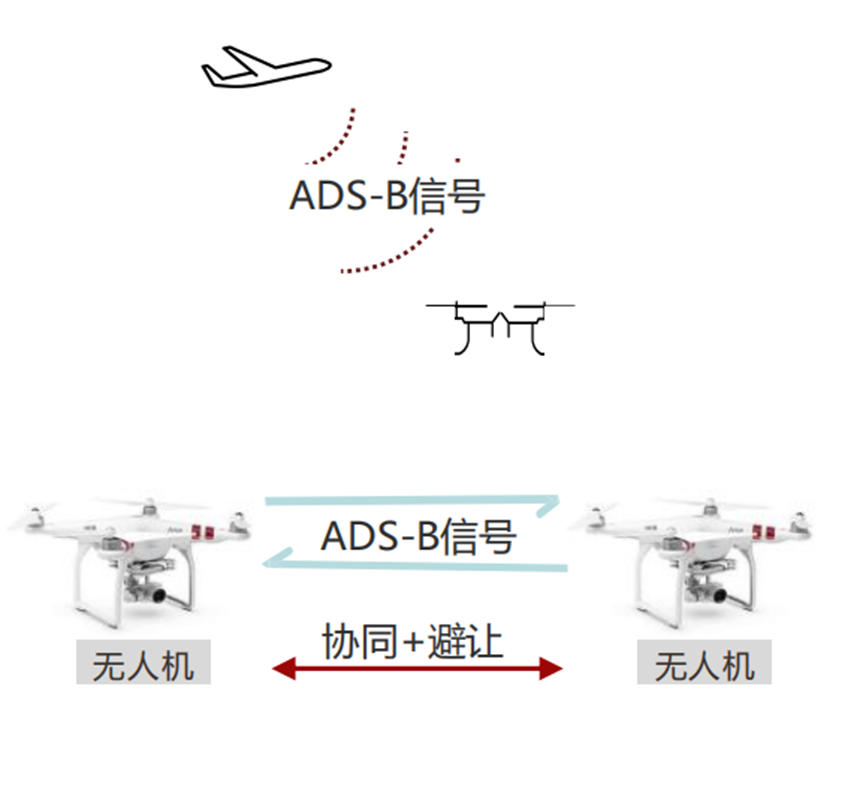
低空經(jīng)濟(jì)——無人機(jī)避撞技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論