") RT-Thread AIOS,讓小車(chē)更懂你!
RT-Thread AIOS,讓小車(chē)更懂你!
如何在嵌入式系統(tǒng)上玩轉(zhuǎn) AI,到底是獨(dú)立部署?云端部署?一直是一個(gè)爭(zhēng)議不斷地問(wèn)題。同時(shí),隨著人形機(jī)器人技術(shù)的快速發(fā)展,移動(dòng)設(shè)備對(duì)智能化的需求也變得尤為迫切。在這樣一個(gè)背景下,RT-Thread AI 團(tuán)隊(duì)經(jīng)歷對(duì)大量芯片廠商和下游應(yīng)用業(yè)務(wù)公司的咨詢(xún)和討論,認(rèn)為在可預(yù)見(jiàn)的未來(lái),AI 會(huì)產(chǎn)生一種端側(cè)和云端混合部署的形態(tài),即大規(guī)模、大參數(shù)模型運(yùn)行在云端,如大語(yǔ)言模型,而中小規(guī)模、中小參數(shù)模型則運(yùn)行在端側(cè),形成一種分布式 AI 部署的形態(tài)。本章將以智能小車(chē)的整個(gè)開(kāi)發(fā)過(guò)程為例,向大家全景展示如何通過(guò)這種分布式 AI 的部署方式,最終實(shí)現(xiàn)傳統(tǒng)小車(chē)的智能化過(guò)程。在這個(gè)過(guò)程中,我們將最大限度的保留原有小車(chē)硬件資源,而通過(guò) RT-Thread AIOS 架構(gòu),最終實(shí)現(xiàn)大模型和端側(cè)小模型協(xié)作,將傳統(tǒng)小車(chē)智能化。
2硬件與軟件架構(gòu)
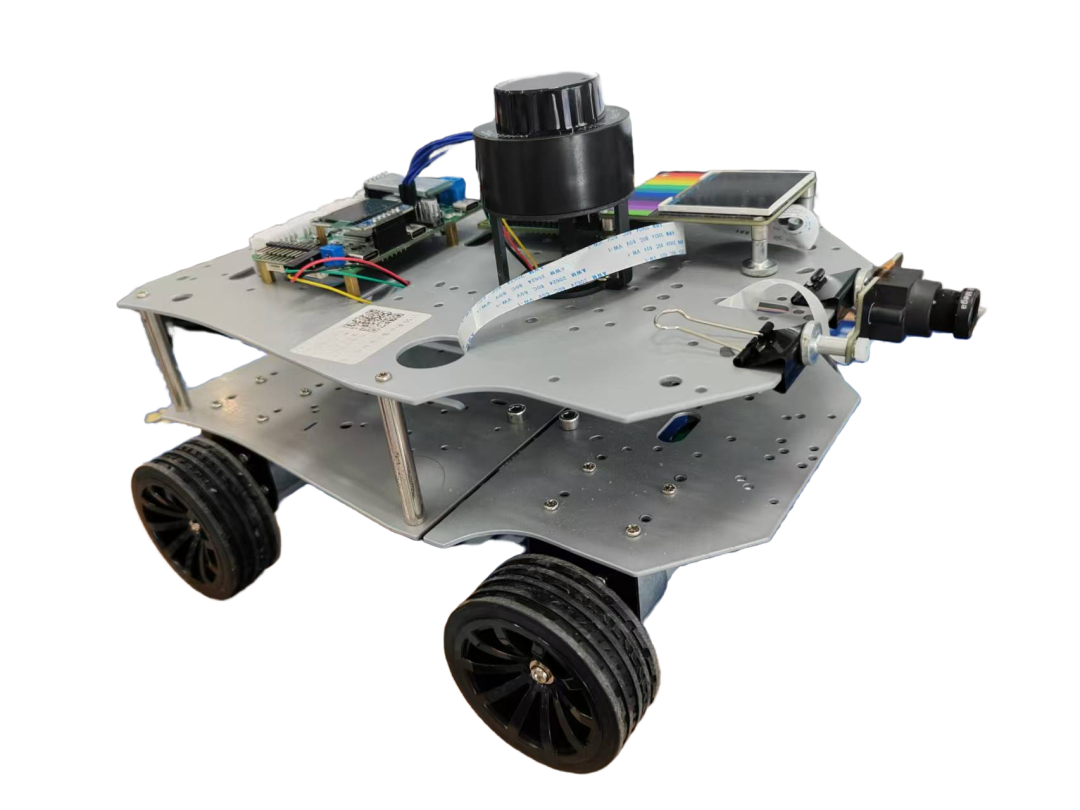
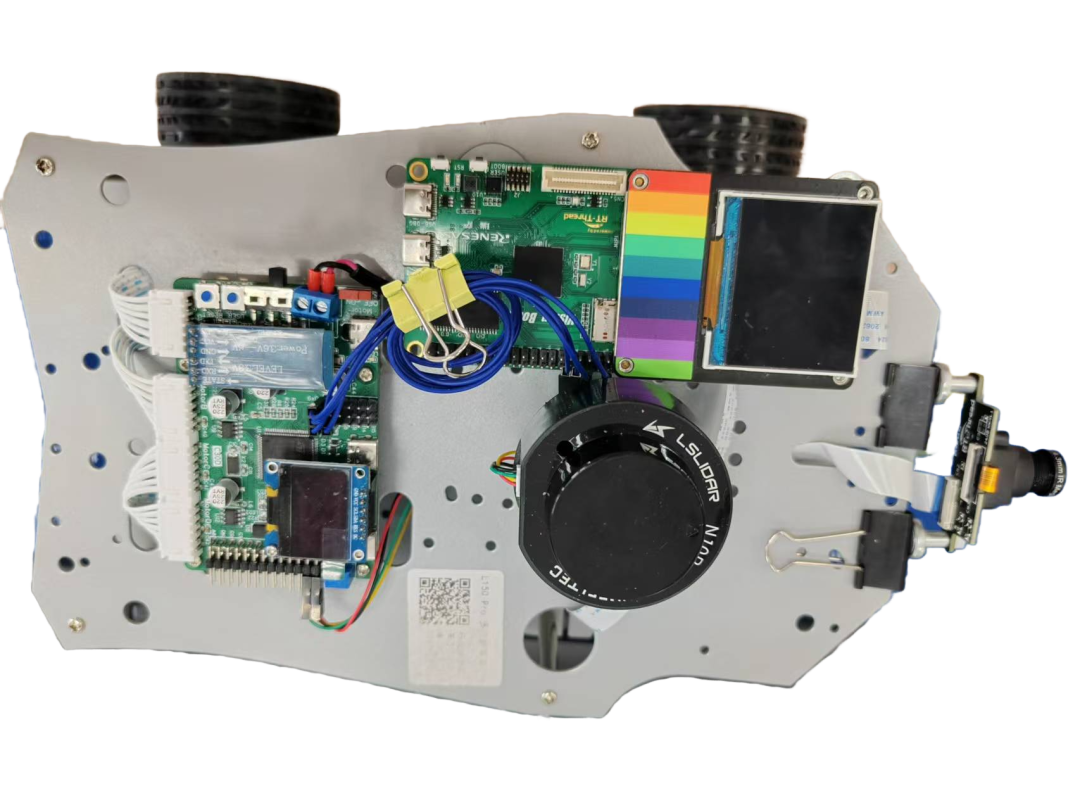
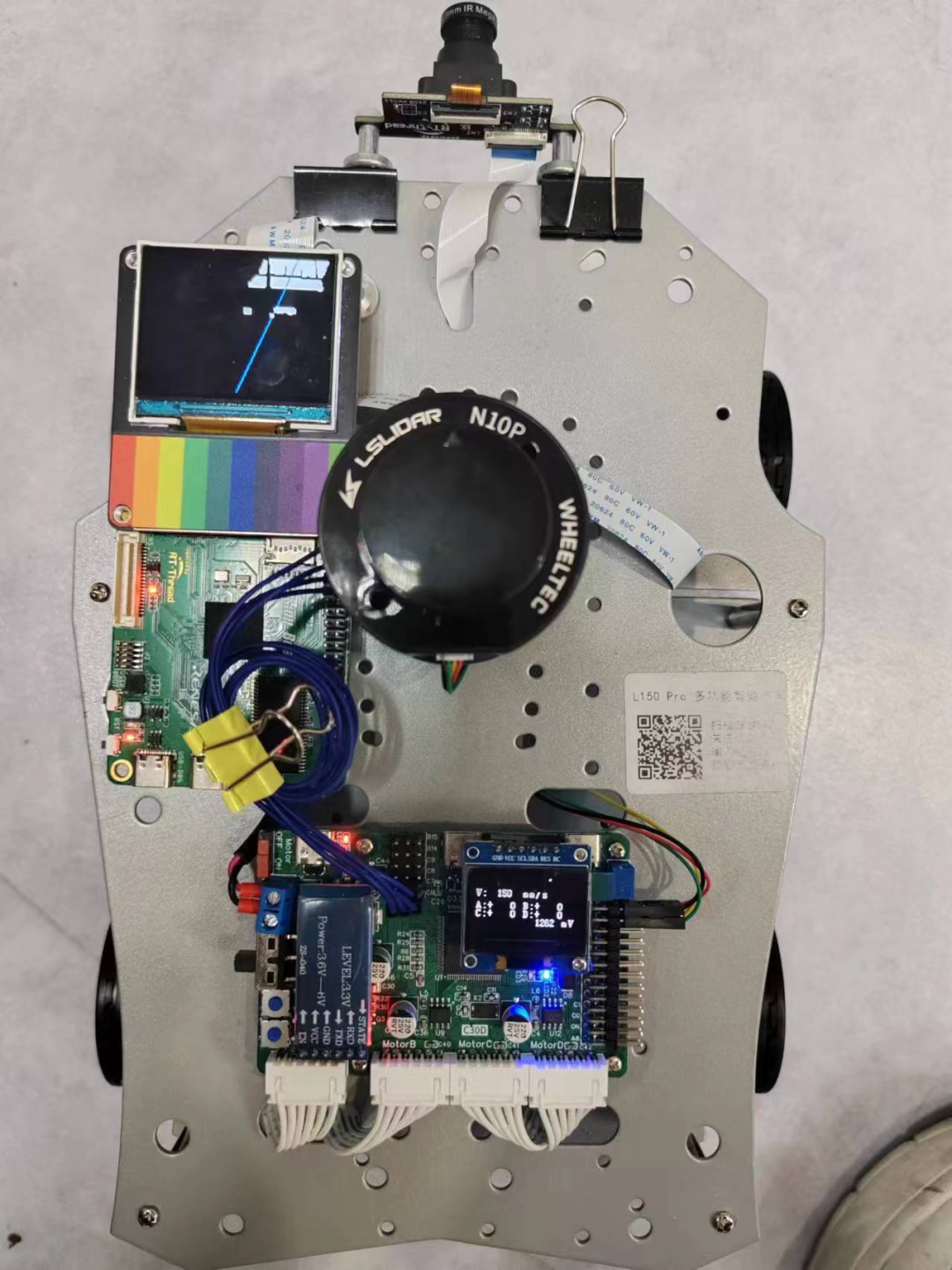
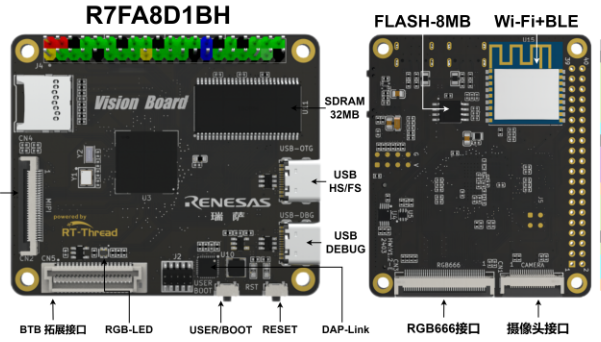
硬件上,智能小車(chē)的車(chē)控部分搭載了意法半導(dǎo)體最基礎(chǔ)的 STM32407VET 芯片,該模塊結(jié)合藍(lán)牙模塊、OLED 顯示屏、激光雷達(dá)等模塊,同時(shí)將 RT-Thread AIOS 框架集成在該芯片上,實(shí)現(xiàn)小車(chē)和云端大語(yǔ)言模型的交互。同時(shí),小車(chē)配備了 Vision-Board 開(kāi)發(fā)板,為智能小車(chē)構(gòu)建了一個(gè)高性能的機(jī)器視覺(jué)模塊。Vision-Board 開(kāi)發(fā)板搭載 Cortex-M85 架構(gòu)的 RA8D1 處理器,配備 LCD 顯示屏和攝像頭,能夠進(jìn)行實(shí)時(shí)圖像處理和顯示,通過(guò)串口和 STM32407VET 芯片進(jìn)行交互。軟件上,兩款芯片均使用了 RT-Thread 實(shí)時(shí)操作系統(tǒng)作為控制系統(tǒng),提供了一系列應(yīng)用組件和驅(qū)動(dòng)框架,如 TCP/IP 協(xié)議棧,虛擬文件系統(tǒng),POSIX 接口,圖形用戶(hù)界面,F(xiàn)reeModbus 主從協(xié)議棧,CAN 框架,動(dòng)態(tài)模塊等。通過(guò)對(duì)智能小車(chē)車(chē)控功能語(yǔ)義級(jí)別的學(xué)習(xí)和應(yīng)用,最終通過(guò)云端的大模型控制小車(chē)實(shí)現(xiàn)各種復(fù)雜功能。在大模型方面,智能小車(chē)采用基于開(kāi)源大模型 SenseVoiceSmall 和通義千問(wèn)大模型的微調(diào)模型進(jìn)行聯(lián)合處理。其中,SenseVoiceSmall 作為一個(gè)輕量化的語(yǔ)音識(shí)別模型,能夠高效地將語(yǔ)音實(shí)時(shí)轉(zhuǎn)化為文本。通義千問(wèn)則對(duì)文本內(nèi)容進(jìn)行智能解析和理解,最終轉(zhuǎn)換成小車(chē)可執(zhí)行的邏輯和指令。在端側(cè)的計(jì)算機(jī)視覺(jué)方面,為達(dá)到智能感知的效果,智能小車(chē)采用 openMV 進(jìn)行圖像處理,其搭載的處理器和攝像頭可以輕松勝任小車(chē)的諸多功能,通過(guò) openMV 實(shí)現(xiàn)了循跡、色塊追蹤、二維碼識(shí)別、人臉追蹤等功能,同時(shí)可以在 LCD 顯示器上迅速、直觀地看到 openmv 圖像處理的過(guò)程。
智能小車(chē)支持 C/Python 等多種編程語(yǔ)言,提供豐富的接口,方便開(kāi)發(fā)者靈活調(diào)用各類(lèi)功能模塊。
3
一些例子
語(yǔ)音控制基于 SenseVoiceSmall 和通義千問(wèn)實(shí)現(xiàn),深度融合了 AI 技術(shù),用戶(hù)通過(guò)語(yǔ)音指令對(duì)小車(chē)進(jìn)行控制,不僅可以在多種模式之間隨心切換,還能精準(zhǔn)控制小車(chē)的運(yùn)動(dòng)狀態(tài)。常用的模式包括循跡、色塊追蹤、二維碼識(shí)別、人臉追蹤、雷達(dá)避障、雷達(dá)跟隨以及雷達(dá)走直線等。
3.1
示例 1:智能小車(chē)底盤(pán)控制
通過(guò)語(yǔ)音識(shí)別切換到尋跡模式后,智能小車(chē)通過(guò)攝像頭實(shí)時(shí)采集圖像,智能分析路面狀況,精準(zhǔn)識(shí)別并追蹤指定路線。
3.2
示例 2:目標(biāo)追蹤
在色塊追蹤模式中,智能小車(chē)能夠識(shí)別特定顏色的物體,并自動(dòng)調(diào)整運(yùn)動(dòng)軌跡以追蹤目標(biāo)。小車(chē)還可以識(shí)別并獲得二維碼中的信息。
智能小車(chē)具備人臉識(shí)別功能,能夠人臉?shù)浫胂到y(tǒng)中。錄入后,小車(chē)便能自動(dòng)追蹤庫(kù)中包含的目標(biāo)人物,智能地跟隨其移動(dòng)。
以上功能充分展示了機(jī)器視覺(jué)在智能小車(chē)中的靈活應(yīng)用,通過(guò)與小車(chē)的互動(dòng),能夠深入理解圖像處理和物體識(shí)別等關(guān)鍵技術(shù)。
3.3
示例 3:激光雷達(dá)應(yīng)用
為了一步提升小車(chē)的智能化水平和環(huán)境感知能力,我們?cè)谛≤?chē)上加裝了激光雷達(dá),這使小車(chē)能夠?qū)崟r(shí)獲取距離信息,從而更有效地避開(kāi)障礙物,加裝激光雷達(dá)后,小車(chē)的整體性能得到了顯著提升。

例如,基于激光雷達(dá)的避障功能,即使小車(chē)在一個(gè)狹小的空間內(nèi),也可以行動(dòng)自如。
上文中我們提到了人臉追蹤功能,在激光雷達(dá)加持下,即使我們沒(méi)有錄入人臉也可以實(shí)現(xiàn)跟蹤,啟動(dòng)雷達(dá)跟蹤可以使小車(chē)跟蹤附近的一個(gè)物體并保持一定距離。
另外,雷達(dá)走直線模式通過(guò)對(duì)參照物體的識(shí)別來(lái)實(shí)現(xiàn)小車(chē)的直線運(yùn)動(dòng)。小車(chē)能夠以其左側(cè)的物體平面作為參照,保持穩(wěn)定的直線行駛。如果需要更換其他角度作為參照,只需對(duì)代碼進(jìn)行相應(yīng)修改或直接修改雷達(dá)角度即可。
3.4
總結(jié):
我們已經(jīng)展示的功能顯示了在 RT-Thread AIOS 框架上,可以通過(guò)語(yǔ)音交互對(duì)基于 RT-Thread OS 的設(shè)備進(jìn)行智能化,最終使得系統(tǒng)理解指令、執(zhí)行指令實(shí)現(xiàn)指令發(fā)出者的控制目標(biāo)。此外,用戶(hù)也可以自行增加定制的源語(yǔ)級(jí)控制函數(shù)到 AIOS 框架中,并通過(guò)云端大模型進(jìn)行理解和學(xué)習(xí),最終通過(guò)語(yǔ)音交互進(jìn)行控制,使得系統(tǒng)變得更加靈活、智能。
-
嵌入式
+關(guān)注
關(guān)注
5144文章
19575瀏覽量
315845 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1377瀏覽量
41619 -
AIOS
+關(guān)注
關(guān)注
0文章
5瀏覽量
2756
發(fā)布評(píng)論請(qǐng)先 登錄
2025 RT-Thread全球技術(shù)大會(huì)議程正式發(fā)布!

RT-Thread審核團(tuán)招募: 深度參與開(kāi)源RTOS社區(qū)治理與演進(jìn)
從“私人教練”到“技術(shù)保鏢”,RT-Thread生態(tài)圈讓你的產(chǎn)品所向披靡!
如何將RT-Thread移植到NXP MCUXPressoIDE上

從開(kāi)源中來(lái)到開(kāi)源中去-RT-Thread北京社區(qū)篇
【S32K146 RT-Thread】之 使用SFUD組件驅(qū)動(dòng)spi flash
RT-Thread上CAN實(shí)踐
開(kāi)源共生 商業(yè)共贏 | RT-Thread 2024開(kāi)發(fā)者大會(huì)報(bào)名啟動(dòng)!
課程上線 - RT-Thread應(yīng)用開(kāi)發(fā)實(shí)踐課程上線慕課平臺(tái)啦!
【成都】9月21日RT-Thread巡回線下培訓(xùn)-OpenMV機(jī)器視覺(jué)
【大連】9月7日RT-Thread巡回線下培訓(xùn)-OpenMV機(jī)器視覺(jué)
【QEMU系列】不用開(kāi)發(fā)板運(yùn)行RT-Thread指南-ARM架構(gòu)
2024 RT-Thread全球巡回 線下培訓(xùn)火熱來(lái)襲!
【好書(shū)推薦】RT-Thread設(shè)備驅(qū)動(dòng)開(kāi)發(fā)指南
RT-Thread 新里程碑達(dá)成——GitHub Star 破萬(wàn)!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論