 AGV激光導航定位技術與構建地圖
AGV激光導航定位技術與構建地圖
自動導引車(Automated Guided Vehicle,簡稱AGV)是現代制造企業物流系統中的重要設備,廣泛應用于物流倉儲、生產制造,是生產環節中柔性制造的重要體現。為系統柔性化、集成化、高效運行提供了重要保證。
激光導航AGV以激光雷達作為探測外部周圍環境的傳感器,從而進行導航定位。相比于其他導航方式,激光導航AGV具有較高的可靠性和柔性,廣泛應用于生產制造的各個領域。
AGV倉儲物流
SLAM(Simultaneous Localization And Mapping),即同時定位與地圖構建,SLAM技術對于機器人或其他智能體的行動和交互能力至為關鍵,因為它代表了這種能力的基礎:知道自己在哪里,知道周圍環境如何,進而知道下一步該如何自主行動。可以說凡是擁有一定行動能力的智能體都擁有某種形式的SLAM系統。
無論是物流倉儲的貨物分揀,還是生產制造的物料搬運,對于激光導航AGV而言,都需要在調試階段存儲完整的地圖信息,然后再投入運行,且運行階段可不對全局地圖進行修改或僅進行適當的修改。
獲取精確的地圖信息是十分重要的,直接影響到運行階段的定位導航精度。一方面可以通過多次靜態探測,將多幅局部地圖進行拼接,得到完整的地圖信息。另一方面,也可以通過同時定位與建圖(slam)得到完整地圖。
 AGV小車
AGV小車
激光SLAM脫胎于早期的基于測距的定位方法(如超聲和紅外單點測距)。激光雷達距離測量比較準確,誤差模型簡單,在強光直射以外的環境中運行穩定,反饋信息本身包含直接的幾何關系,使得機器人的路徑規劃和導航變得直觀。激光SLAM理論研究也相對成熟,落地產品更豐富。
通過激光雷達對場景的觀測,實時創建地圖并修正機器人位置,無需二維碼、色帶、磁條等人工布設標志物,真正實現對作業環境的零改造。另一方面,通過激光雷達對障礙物的實時檢測,有效規劃軌跡避開障礙物,提高人機混合場景的適用和安全性。
 AGV無人叉車
AGV無人叉車
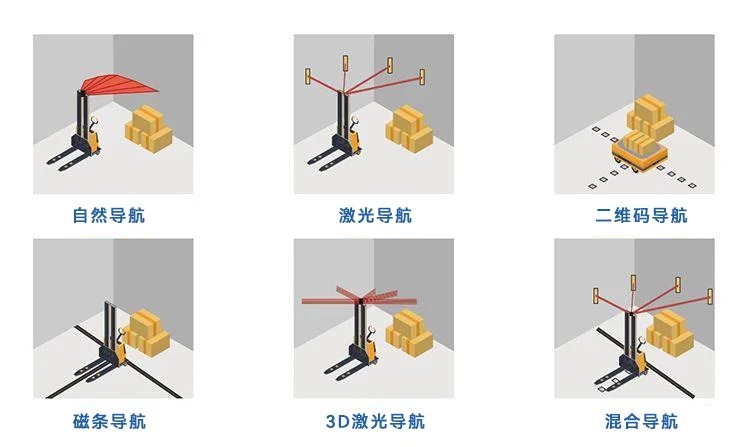
激光導航AGV具有較高的可靠性、精準性、靈活性,能夠適用于大部分的生產領域。基于反射標記物的激光導航方式,技術相對成熟。自然導航因其具有更好的靈活性,具有較大的發展潛力。基于上述兩種方式的復合式激光導航,同時兼顧可靠性與靈活性,具有極高的研究價值。
地圖構建是激光導航AGV十分重要的內容。激光導航結合AGV內部定位傳感器可以獲得更好的導航質量。在激光導航的基礎上,引入新的導航方式用以輔助,配合外部環境添加的額外特定輪廓,可以使定位精度和可靠性進一步提升。
審核編輯 黃宇
-
定位
+關注
關注
5文章
1411瀏覽量
35844 -
AGV
+關注
關注
27文章
1433瀏覽量
42042 -
激光導航
+關注
關注
0文章
48瀏覽量
5830
發布評論請先 登錄
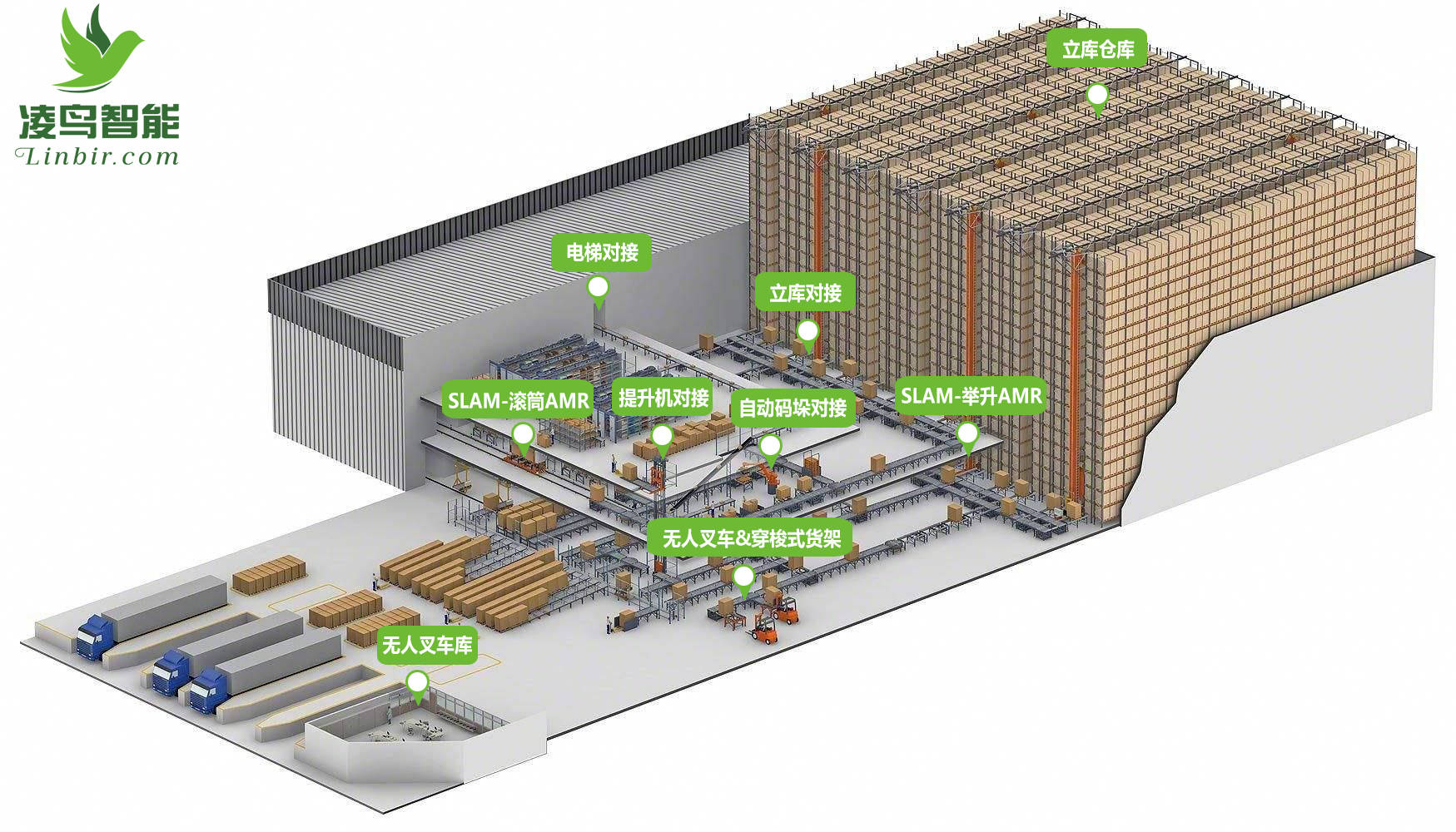
無人叉車AGV的智能物流樞紐邏輯:對接方式分類、技術原理及場景適配

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用

無軌激光AGV移動機器人如何構建地圖?

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?

揭秘室內動態地圖應用背后的技術原理與優勢

革新出行體驗:音頻定位導航系統引領智能導航新時代
室外牽引AGV:慣性測量+衛星定位+激光雷達,我全都要!

agv叉車怎么運行的?速度受哪些因素影響?有哪些不確定因素?






 工商網監
工商網監
評論