") GNSS仿真中的HiL延遲:挑戰(zhàn)、影響與解決方案深度剖析
GNSS仿真中的HiL延遲:挑戰(zhàn)、影響與解決方案深度剖析
作者介紹
一、GNSS仿真與Hil延遲
自動(dòng)駕駛技術(shù)的快速發(fā)展為現(xiàn)代交通系統(tǒng)帶來(lái)了巨大的變革,而全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)在其中扮演著關(guān)鍵的角色。GNSS不僅為自動(dòng)駕駛車輛提供準(zhǔn)確的定位信息,還為導(dǎo)航、速度計(jì)算和時(shí)間同步等關(guān)鍵功能提供支持。然而,在將自動(dòng)駕駛系統(tǒng)投入實(shí)際道路之前,進(jìn)行全面的仿真測(cè)試是至關(guān)重要的。
GNSS仿真測(cè)試在自動(dòng)駕駛技術(shù)開(kāi)發(fā)中占據(jù)著重要地位。通過(guò)模擬不同環(huán)境下的衛(wèi)星信號(hào),可以評(píng)估車輛在各種條件下的導(dǎo)航性能。這種測(cè)試有助于驗(yàn)證系統(tǒng)對(duì)定位誤差、信號(hào)遮擋和多路徑效應(yīng)的魯棒性,提高自動(dòng)駕駛系統(tǒng)在現(xiàn)實(shí)世界中的可靠性和安全性。
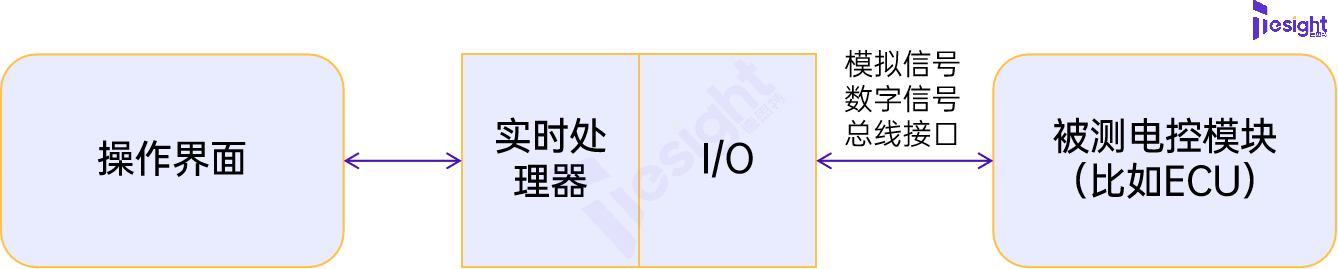
在仿真測(cè)試的多個(gè)層面中,硬件在環(huán)(Hardware-in-the-Loop,HiL)測(cè)試方法更是一項(xiàng)關(guān)鍵的技術(shù)。HiL測(cè)試通過(guò)在實(shí)際硬件系統(tǒng)(如傳感器、控制單元等)與仿真環(huán)境之間建立實(shí)時(shí)連接,實(shí)現(xiàn)了對(duì)整個(gè)自動(dòng)駕駛系統(tǒng)的高度真實(shí)性測(cè)試。這種方法不僅可以驗(yàn)證GNSS接收器的性能,還可以考察其與其他傳感器和控制單元的集成效果。
綜合而言,GNSS仿真測(cè)試及其在HiL測(cè)試中的應(yīng)用,為自動(dòng)駕駛技術(shù)的研發(fā)提供了強(qiáng)大的工具。通過(guò)這些測(cè)試方法,開(kāi)發(fā)人員能夠更全面、更深入地了解自動(dòng)駕駛系統(tǒng)在不同情境下的表現(xiàn),從而不斷優(yōu)化其性能,推動(dòng)智能交通的發(fā)展。
然而HiL的發(fā)展也帶來(lái)了挑戰(zhàn),在硬件在環(huán)(HiL)測(cè)試中,延遲問(wèn)題是一個(gè)至關(guān)重要的方面。延遲是指在信號(hào)從傳感器到控制單元再到執(zhí)行器的傳輸過(guò)程中所經(jīng)歷的時(shí)間延遲。在自動(dòng)駕駛系統(tǒng)中,尤其是涉及全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)的情境下,延遲問(wèn)題可能導(dǎo)致嚴(yán)重的性能影響,甚至危及系統(tǒng)的安全性。
二、HiL仿真中GNSS信號(hào)延遲的影響
首先,GNSS信號(hào)的延遲可能對(duì)車輛的實(shí)時(shí)定位產(chǎn)生顯著影響。如果系統(tǒng)無(wú)法及時(shí)處理來(lái)自衛(wèi)星的定位信息,車輛可能在導(dǎo)航中產(chǎn)生誤差,導(dǎo)致不準(zhǔn)確的位置和軌跡預(yù)測(cè)。這對(duì)于自動(dòng)駕駛車輛而言是不可接受的,因?yàn)樗鼈冃枰焖佟?zhǔn)確地做出決策以確保行駛安全。
其次,延遲問(wèn)題也可能影響到系統(tǒng)的實(shí)時(shí)響應(yīng)性。在自動(dòng)駕駛中,及時(shí)的傳感器信息和控制命令對(duì)于避免碰撞、調(diào)整車速等關(guān)鍵操作至關(guān)重要。如果存在較大的延遲,系統(tǒng)可能無(wú)法在緊急情況下迅速做出反應(yīng),增加了事故的風(fēng)險(xiǎn)。
解決HiL測(cè)試中的延遲問(wèn)題需要精心的設(shè)計(jì)和優(yōu)化。通過(guò)使用高性能的實(shí)時(shí)計(jì)算平臺(tái)、優(yōu)化傳感器和控制單元之間的通信協(xié)議,以及采用先進(jìn)的同步技術(shù),可以最小化信號(hào)傳輸?shù)难舆t。定期的延遲分析和調(diào)試也是確保系統(tǒng)性能的關(guān)鍵步驟,以便及時(shí)發(fā)現(xiàn)和解決潛在的延遲問(wèn)題。
三、HiL延遲是否會(huì)影響測(cè)試?
這取決于測(cè)試項(xiàng)目與內(nèi)容。大多數(shù)針對(duì)接收機(jī)/芯片的GNSS性能與指標(biāo)測(cè)試不需要實(shí)時(shí)遠(yuǎn)程運(yùn)動(dòng)。在使用預(yù)定義運(yùn)動(dòng)和軌跡就能足夠。這個(gè)時(shí)候,無(wú)論你的設(shè)備是否有延遲,延遲有多高,起始并不影響測(cè)試項(xiàng)目。
而如果,你需要進(jìn)行的是閉環(huán)測(cè)試,需要測(cè)試后端的反饋或人類控制,此時(shí)延遲就是特別需要控制的內(nèi)容,延遲越大,測(cè)試的不確定性就越大。隨著動(dòng)態(tài)性的增加,較高的延遲而插入到測(cè)試中的潛在錯(cuò)誤將會(huì)呈指數(shù)級(jí)增加。
四、HiL延遲分析
1.開(kāi)環(huán)HiL
開(kāi)環(huán)硬件在環(huán)(Open-Loop Hardware-in-the-Loop,開(kāi)環(huán)HiL)是一種在測(cè)試和驗(yàn)證系統(tǒng)時(shí)使用的HiL測(cè)試方法。在開(kāi)環(huán)HiL中,測(cè)試系統(tǒng)被置于仿真環(huán)境中,但與系統(tǒng)的實(shí)際控制器斷開(kāi),控制器的輸出信號(hào)由仿真環(huán)境生成,而不是來(lái)自實(shí)際系統(tǒng)。
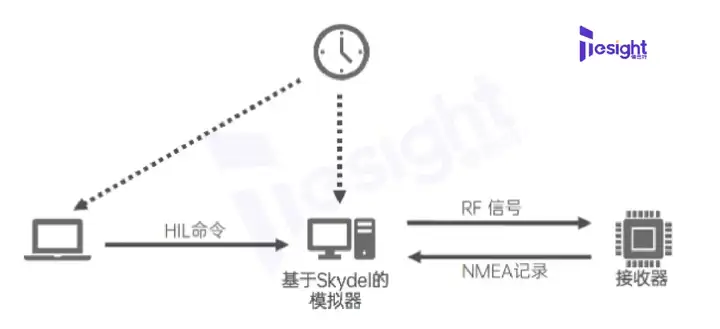
GNSS模擬器仿真內(nèi)容是根據(jù)前端的HiL文件或控制端生成的,但無(wú)需接受遠(yuǎn)端系統(tǒng)的實(shí)時(shí)反饋。這些反饋將在模擬迭代之前就已經(jīng)預(yù)定義,本質(zhì)上是數(shù)據(jù)進(jìn)行單項(xiàng)流動(dòng)。在這種情況下,系統(tǒng)進(jìn)行時(shí)間戳標(biāo)記與緩存即可實(shí)現(xiàn)零延遲。
以GNSS模擬器為例,其迭代率為1000Hz,即每秒產(chǎn)生1000次數(shù)據(jù),間隔為1ms。當(dāng)網(wǎng)絡(luò)與線路延遲為5ms時(shí),GNSS模擬器可以提前五秒接收數(shù)據(jù)并處理(相對(duì)于時(shí)間戳),即可完成零延遲輸出。

2.閉環(huán)仿真
閉環(huán)硬件在環(huán)(Closed-Loop Hardware-in-the-Loop,閉環(huán)HiL)是一種高級(jí)的HiL測(cè)試方法,其中系統(tǒng)的實(shí)際控制器與仿真環(huán)境相連,形成一個(gè)封閉的控制回路。在閉環(huán)HiL中,系統(tǒng)的輸出由實(shí)際控制器產(chǎn)生,并傳遞給仿真環(huán)境,仿真環(huán)境再模擬實(shí)際系統(tǒng)的響應(yīng),形成一個(gè)真實(shí)的控制環(huán)境。
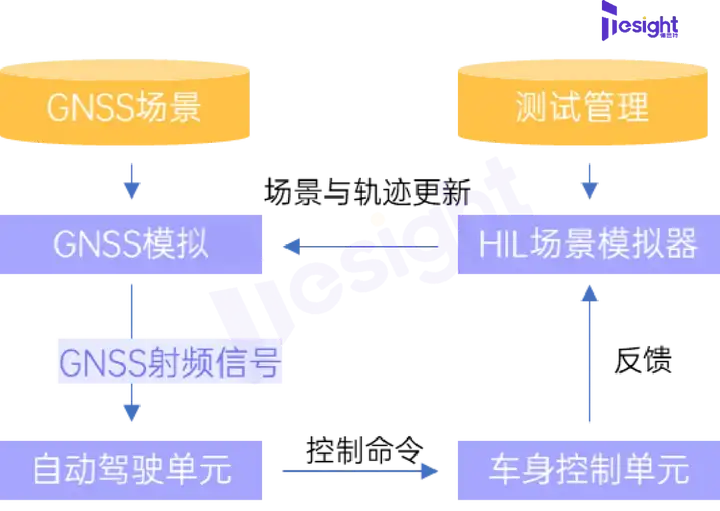
閉環(huán)測(cè)試一般需要考慮DUT的反饋信息,GNSS接收到的信息是根據(jù)反饋實(shí)時(shí)生成的未知信息,因此,閉環(huán)中就會(huì)存在延遲。
但對(duì)于閉環(huán)測(cè)試來(lái)講,過(guò)大的延遲將會(huì)導(dǎo)致結(jié)果失真。最典型的例子是飛行員/駕駛員參與的模擬測(cè)試。飛行員/駕駛員需要根據(jù)看到的畫面與車輛轉(zhuǎn)態(tài)(待測(cè)件)做出指令,比如轉(zhuǎn)向、剎車等。此時(shí)如果延遲過(guò)大將會(huì)影響后續(xù)的命令生成與信號(hào)產(chǎn)生,將會(huì)導(dǎo)致仿真失真與不連續(xù)。
 VOLVO DiL測(cè)試中的駕駛員艙室
VOLVO DiL測(cè)試中的駕駛員艙室
閉環(huán)HiL無(wú)法像開(kāi)環(huán)HiL一樣提前接收到數(shù)據(jù)做預(yù)測(cè),因此延遲是必然存在的,GNSS模擬器延遲產(chǎn)生主要由以下幾部分構(gòu)成:
● 從上游節(jié)點(diǎn)或設(shè)備發(fā)送最新消息的時(shí)間
● GNSS接收和處理消息的時(shí)間
● 在GNSS模擬器中生成、轉(zhuǎn)換的時(shí)間
● 射頻信號(hào)輸出所用的時(shí)間
我們對(duì)這個(gè)延遲時(shí)間做分析:
1)從上游節(jié)點(diǎn)或設(shè)備發(fā)送最新消息的時(shí)間
我們將其稱之為網(wǎng)絡(luò)延遲或傳輸延遲,是指上游節(jié)點(diǎn)生成消息到達(dá)GNSS模擬器的時(shí)間,這一延遲受網(wǎng)絡(luò)和傳輸環(huán)境影響,一般為1-2ms。
2)GNSS接收和處理消息的時(shí)間
我們將其稱之為采樣延遲,指GNSS收到消息到被系統(tǒng)捕獲所用的時(shí)間。這一時(shí)間取決于雙邊的采樣率,采樣率越高,每秒鐘回傳到系統(tǒng)的數(shù)據(jù)越密集。以GNSS模擬器為例,其迭代率為1000Hz,即間隔為1ms。
若上游節(jié)點(diǎn)迭代率也是1000Hz且時(shí)間完全同步,假設(shè)數(shù)據(jù)是在這一次傳輸后剛結(jié)束到來(lái)的,那么最差的情況則是其在下一次采樣被捕獲,用時(shí)<1ms。
若上游節(jié)點(diǎn)迭代率是100Hz且時(shí)間完全同步,那么數(shù)據(jù)需要10ms生成一組,假設(shè)數(shù)據(jù)是在這一次傳輸后剛結(jié)束到來(lái)的,那么最差的情況則是其在第十次采樣被捕獲,用時(shí)<10ms。
反之,若上游節(jié)點(diǎn)迭代率是1000Hz,而GNSS模擬器迭代率只有100Hz(市場(chǎng)上大多數(shù)情況如此),數(shù)據(jù)每1ms生成一組,假設(shè)數(shù)據(jù)是在這一次傳輸后剛結(jié)束到來(lái)的,那么最差的情況則是未來(lái)的十組數(shù)據(jù)均無(wú)法被GNSS模擬器捕獲到,第十一組數(shù)據(jù)才會(huì)被捕獲到,此時(shí)中間損失十組數(shù)據(jù),用時(shí)將大于9ms,小于10ms。
3)在GNSS模擬器中生成、轉(zhuǎn)換的時(shí)間
我們稱之為更新延遲,指GNSS捕獲到數(shù)據(jù)轉(zhuǎn)換為IQ數(shù)據(jù)的時(shí)間。這一事件取決于GNSS模擬器的算力與GPU性能。這一延遲會(huì)跟隨仿真過(guò)程有實(shí)時(shí)變化,一般很難準(zhǔn)確觀測(cè)。
4)射頻信號(hào)輸出所用的時(shí)間
我們稱之為輸出延遲或推流延遲,指IQ數(shù)據(jù)轉(zhuǎn)化為RF信號(hào)所用的時(shí)間,這一事件取決于GNSS模擬器的SDR性能。這一延遲會(huì)跟隨仿真過(guò)程有實(shí)時(shí)變化,一般很難準(zhǔn)確觀測(cè)。
五、HiL仿真與延遲觀測(cè)
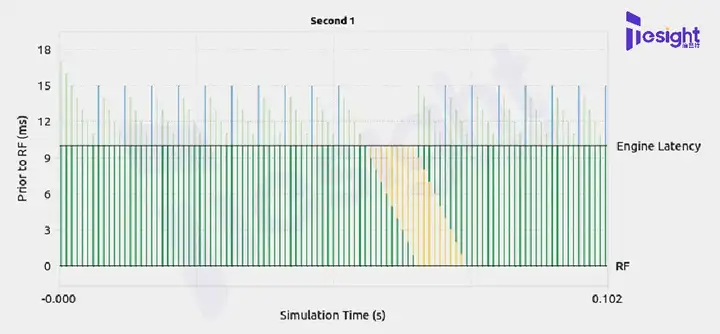
正如剛才所說(shuō),延遲是很難觀測(cè)的,為了盡可能解決這一問(wèn)題,GNSS模擬器依托軟件定義架構(gòu)提出了HiL可視化功能,實(shí)現(xiàn)了對(duì)HiL仿真過(guò)程中延遲與性能的可視化觀測(cè)。
性能界面可以觀測(cè)到詳細(xì)HiL延遲狀態(tài)。
HiL圖界面在觀測(cè)HiL實(shí)現(xiàn)過(guò)程中進(jìn)行旨在進(jìn)行精確的診斷,并使您確信解決方案正按您的預(yù)期運(yùn)行。
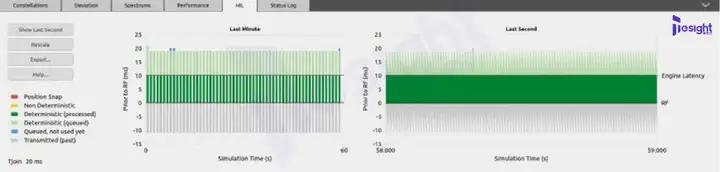
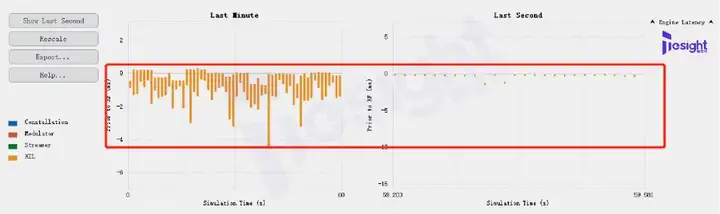
通過(guò)對(duì)HiL圖的直觀分析,可以觀察到不同狀態(tài)與信息:
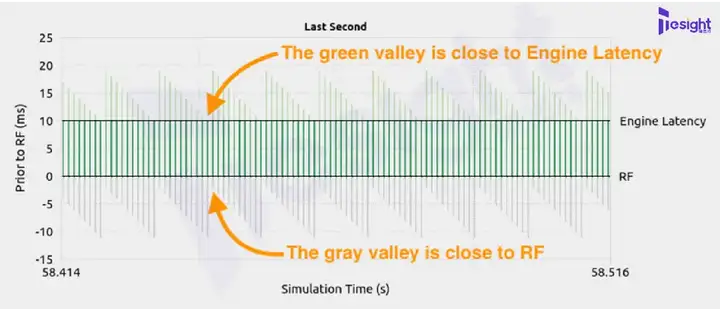
● 綠色谷底達(dá)到了引擎延遲并保持為綠色;沒(méi)有藍(lán)色、黃色或紅色。這意味著HiL軌跡樣本恰好按時(shí)接收,既不會(huì)太早也不會(huì)太晚。
● 灰色谷底靠近RF。這意味著Tjoin值和HiL軌跡采樣率匹配良好。
● 所有峰值和谷底非常相似。這意味著樣本按固定間隔接收,波動(dòng)很小。
在出現(xiàn)HiL波動(dòng)、滯后、丟失等情況時(shí)均有不同的顯示:
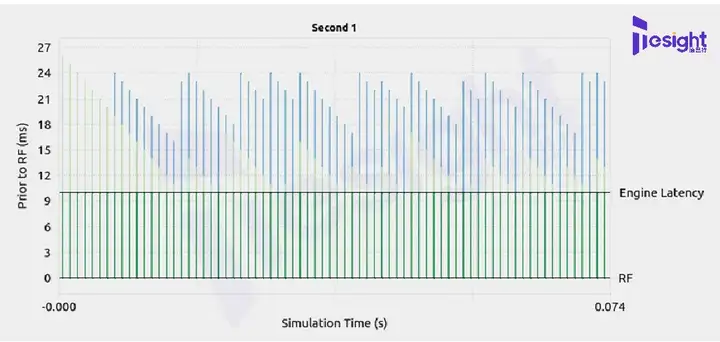
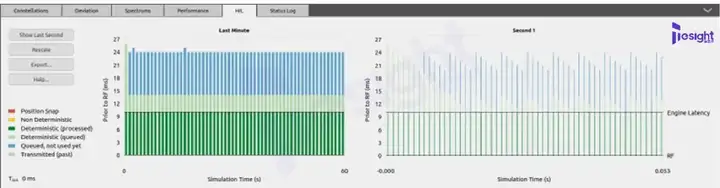 時(shí)間漂移
時(shí)間漂移
 抖動(dòng)
抖動(dòng)
 樣本丟失
樣本丟失
審核編輯 黃宇
-
仿真
+關(guān)注
關(guān)注
51文章
4249瀏覽量
135417 -
HIL
+關(guān)注
關(guān)注
2文章
65瀏覽量
17934 -
GNSS
+關(guān)注
關(guān)注
9文章
849瀏覽量
49117
發(fā)布評(píng)論請(qǐng)先 登錄
5月22日技術(shù)直播分享 | 智能底盤電控產(chǎn)品仿真測(cè)試解決方案

助力dSPACE實(shí)現(xiàn)基于GNSS的駕駛功能的HIL仿真 ,加速自動(dòng)駕駛測(cè)試革命!

電力電子半實(shí)物仿真(HIL)原理及應(yīng)用

車聯(lián)網(wǎng)HIL仿真測(cè)試解決方案

底盤電控系統(tǒng)HIL仿真測(cè)試解決方案

智能駕駛HIL仿真測(cè)試解決方案

汽車HiL測(cè)試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術(shù)
部署更快,自動(dòng)化程度高!TOSUN同星線控底盤解決方案

設(shè)計(jì)仿真 基于VTD的AR-HUD仿真測(cè)試解決方案

【干貨分享】硬件在環(huán)仿真(HiL)測(cè)試

Skydel基于NI USRP實(shí)現(xiàn)軟件定義GNSS信號(hào)仿真 #GNSS #GPS #NI #GNSS仿真
教學(xué)驗(yàn)證篇丨PPEC+HIL BUCK仿真驗(yàn)證

教學(xué)驗(yàn)證篇丨PPEC+HIL 單相逆變仿真驗(yàn)證

高速信號(hào)仿真中的FFE均衡技術(shù)
教學(xué)驗(yàn)證篇丨PPEC+HIL DAB仿真驗(yàn)證





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論