") 如何設(shè)定機(jī)器人語義地圖的細(xì)粒度級(jí)別
如何設(shè)定機(jī)器人語義地圖的細(xì)粒度級(jí)別

0. 這篇文章干了啥?
機(jī)器人學(xué)中的一個(gè)基本問題是創(chuàng)建機(jī)器人觀察到的場(chǎng)景的有用地圖表示,其中有用性由機(jī)器人利用地圖完成感興趣的任務(wù)的能力來衡量。最近的研究,包括構(gòu)建語義度量三維地圖,通過檢測(cè)對(duì)象和區(qū)域與封閉的語義標(biāo)簽集對(duì)應(yīng)的工作。然而,封閉集檢測(cè)在能夠表示的概念集方面存在固有的限制,并且不能很好地處理自然語言的內(nèi)在歧義性和可變性。為了克服這些限制,一組新的方法開始利用視覺語言基礎(chǔ)模型進(jìn)行開放集語義理解。這些方法使用一個(gè)無類別分割網(wǎng)絡(luò)(SegmentAnything或SAM)生成圖像的細(xì)粒度段,然后應(yīng)用一個(gè)基礎(chǔ)模型得到描述每個(gè)段的開放集語義的嵌入向量。然后通過將段關(guān)聯(lián)起來構(gòu)造對(duì)象,只要它們的嵌入向量在預(yù)定義的相似度閾值內(nèi)。然而,這些方法把調(diào)整適當(dāng)?shù)拈撝档睦щy任務(wù)留給了用戶,以控制從場(chǎng)景中提取的段的數(shù)量,以及用于決定是否必須將兩個(gè)段聚類在一起的閾值。更重要的是,這些方法沒有捕捉到地圖中語義概念的選擇不僅僅受語義相似性驅(qū)動(dòng),而且是內(nèi)在于任務(wù)的。例如,考慮一個(gè)被指派移動(dòng)鋼琴的機(jī)器人。機(jī)器人通過區(qū)分所有鍵和弦的位置幾乎不會(huì)增加價(jià)值,但可以通過將鋼琴視為一個(gè)大對(duì)象來完成任務(wù)。另一方面,被指派演奏鋼琴的機(jī)器人必須將鋼琴視為許多對(duì)象(即鍵)。被指派調(diào)音鋼琴的機(jī)器人必須將鋼琴視為更多的對(duì)象------考慮到弦、調(diào)音銷等。同樣,像一堆衣服應(yīng)該表示為一個(gè)單獨(dú)的堆還是單獨(dú)的衣服,或者一片森林應(yīng)該表示為一個(gè)單獨(dú)的地貌區(qū)域還是樹枝、葉子、樹干等,直到我們明確了表示必須支持的任務(wù),這些問題仍然沒有得到解決。人類不僅在決定要表示哪些對(duì)象以及如何表示時(shí)考慮任務(wù)(有意識(shí)或無意識(shí)),而且還能相應(yīng)地忽略與任務(wù)無關(guān)的場(chǎng)景部分。
下面一起來閱讀一下這項(xiàng)工作~
1. 論文信息
標(biāo)題:Clio: Real-time Task-Driven Open-Set 3D Scene Graphs
作者:Dominic Maggio, Yun Chang, Nathan Hughes, Matthew Trang, Dan Griffith, Carlyn Dougherty, Eric Cristofalo, Lukas Schmid, Luca Carlone
機(jī)構(gòu):MIT
原文鏈接:https://arxiv.org/abs/2404.13696
代碼鏈接:https://github.com/MIT-SPARK/Clio
2. 摘要
現(xiàn)代無關(guān)類別圖像分割工具(例如SegmentAnything)和開放集語義理解(例如CLIP)為機(jī)器人感知和地圖繪制提供了前所未有的機(jī)會(huì)。雖然傳統(tǒng)的封閉集度量語義地圖僅限于幾十個(gè)或幾百個(gè)語義類別,但現(xiàn)在我們可以建立包含大量對(duì)象和無數(shù)語義變體的地圖。這給我們留下了一個(gè)基本問題:機(jī)器人必須在其地圖表示中包含什么樣的對(duì)象(更一般地說,包含什么樣的語義概念)才是正確的粒度?雖然相關(guān)工作通過調(diào)整對(duì)象檢測(cè)的閾值來隱式選擇粒度級(jí)別,但我們認(rèn)為這樣的選擇本質(zhì)上取決于任務(wù)。本文的第一個(gè)貢獻(xiàn)是提出了一個(gè)任務(wù)驅(qū)動(dòng)的3D場(chǎng)景理解問題,其中機(jī)器人被給定了一系列用自然語言描述的任務(wù),必須選擇足以完成任務(wù)的粒度和對(duì)象子集以及場(chǎng)景結(jié)構(gòu)并將其保留在其地圖中。我們表明,可以使用信息瓶頸(IB)這一已建立的信息論框架來自然地構(gòu)建這個(gè)問題。第二個(gè)貢獻(xiàn)是一種基于聚合式信息瓶頸方法的任務(wù)驅(qū)動(dòng)的3D場(chǎng)景理解算法,能夠?qū)h(huán)境中的3D基元聚類成與任務(wù)相關(guān)的對(duì)象和區(qū)域,并逐步執(zhí)行。第三個(gè)貢獻(xiàn)是將我們的任務(wù)驅(qū)動(dòng)聚類算法集成到一個(gè)名為Clio的實(shí)時(shí)流水線中,該流水線僅使用板載計(jì)算,隨著機(jī)器人探索環(huán)境,在線構(gòu)建環(huán)境的分層3D場(chǎng)景圖。我們的最終貢獻(xiàn)是進(jìn)行了大量實(shí)驗(yàn),表明Clio不僅可以實(shí)時(shí)構(gòu)建緊湊的開放集3D場(chǎng)景圖,而且通過將地圖限制在相關(guān)的語義概念上,還提高了任務(wù)執(zhí)行的準(zhǔn)確性。
3. 效果展示
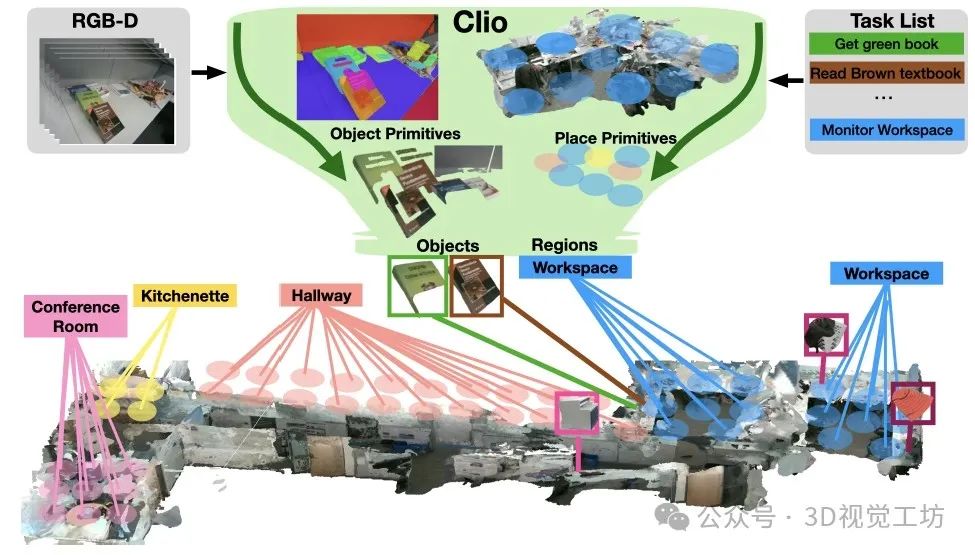
我們提出了Clio,一種新穎的方法,用于在嵌入的開放集語義的情況下實(shí)時(shí)構(gòu)建任務(wù)驅(qū)動(dòng)的3D場(chǎng)景圖。我們從經(jīng)典的信息瓶頸原理汲取靈感,根據(jù)一組自然語言任務(wù)------例如"閱讀棕色教科書"------形成與任務(wù)相關(guān)的對(duì)象基元的聚類,并通過將場(chǎng)景聚類為與任務(wù)相關(guān)的語義區(qū)域,如"小廚房"或"工作區(qū)"來進(jìn)行聚類。
Clio使用Spot攜帶的筆記本電腦實(shí)時(shí)生成3D場(chǎng)景圖。我們展示了Spot能夠使用Clio的任務(wù)驅(qū)動(dòng)3D場(chǎng)景圖執(zhí)行用自然語言表達(dá)的抓取命令。

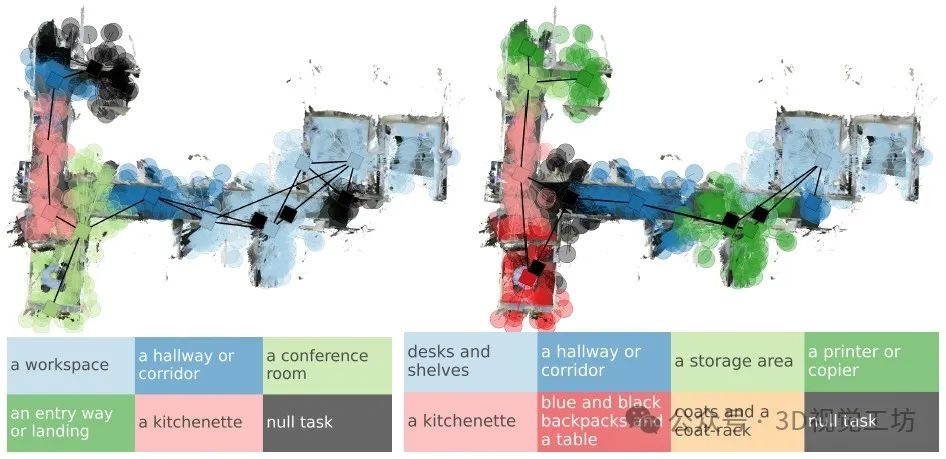
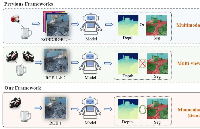
對(duì)地點(diǎn)聚類的定性示例。第一張圖顯示了通過類似房間類別標(biāo)簽的任務(wù)提示進(jìn)行聚類而產(chǎn)生的區(qū)域。第二張圖顯示了通過任務(wù)提示進(jìn)行聚類而產(chǎn)生的區(qū)域,這些任務(wù)提示是潛在房間和物體的混合。
4. 主要貢獻(xiàn)
我們的第一個(gè)貢獻(xiàn)是闡述任務(wù)驅(qū)動(dòng)的三維場(chǎng)景理解問題,其中機(jī)器人被給定一組在自然語言中指定的任務(wù),并且需要構(gòu)建一個(gè)足以完成給定任務(wù)的最小地圖表示。更具體地說,我們假設(shè)機(jī)器人能夠感知環(huán)境中的任務(wù)無關(guān)基元,以一組三維對(duì)象段和三維無障礙區(qū)域的形式,并且必須將它們聚類成一個(gè)僅包含相關(guān)對(duì)象和區(qū)域(例如,房間)的任務(wù)相關(guān)壓縮表示。這個(gè)問題可以自然地使用經(jīng)典的信息瓶頸(IB)理論進(jìn)行公式化,該理論還提供了用于任務(wù)驅(qū)動(dòng)聚類的算法方法。
我們的第二個(gè)貢獻(xiàn)是將來自任務(wù)驅(qū)動(dòng)三維場(chǎng)景理解問題的凝聚IB算法應(yīng)用到問題中。具體而言,我們展示了如何使用CLIP嵌入獲取算法中所需的概率密度,并且表明由此產(chǎn)生的算法可以隨著機(jī)器人探索環(huán)境而逐步執(zhí)行,其計(jì)算復(fù)雜度不隨環(huán)境大小增加。
我們的第三個(gè)貢獻(xiàn)是將提出的任務(wù)驅(qū)動(dòng)聚類算法納入一個(gè)實(shí)時(shí)系統(tǒng)中,稱為Clio。Clio在操作開始時(shí)接收一組在自然語言中指定的任務(wù)列表:例如,這些可以是機(jī)器人在其生命周期內(nèi)或當(dāng)前部署期間被設(shè)想執(zhí)行的任務(wù)。然后,隨著機(jī)器人的操作,Clio實(shí)時(shí)創(chuàng)建一個(gè)層次地圖,即環(huán)境的三維場(chǎng)景圖,其中表示僅保留相關(guān)對(duì)象和區(qū)域的任務(wù)。與當(dāng)前用于開放集三維場(chǎng)景圖構(gòu)建的方法相反,這些方法僅限于離線操作,當(dāng)查詢大型視覺語言模型(VLMs)和大型語言模型(LLMs)時(shí),并且Clio在實(shí)時(shí)和板載上運(yùn)行,僅依賴于輕量級(jí)基礎(chǔ)模型,例如CLIP。我們?cè)赗eplica數(shù)據(jù)集和四個(gè)真實(shí)環(huán)境中演示了Clio------一個(gè)公寓,一個(gè)辦公室,一個(gè)隔間和一個(gè)大型建筑場(chǎng)景。我們還展示了在一臺(tái)波士頓動(dòng)力Spot四足機(jī)器人上使用Clio進(jìn)行實(shí)時(shí)板載地圖制作。Clio不僅允許實(shí)時(shí)開放集三維場(chǎng)景圖構(gòu)建,而且通過限制地圖僅包含相關(guān)對(duì)象和區(qū)域來提高任務(wù)執(zhí)行的準(zhǔn)確性。我們?cè)趆ttps://github.com/MIT-SPARK/Clio上開源了Clio,并附帶了我們的自定義數(shù)據(jù)集。
5. 基本原理是啥?
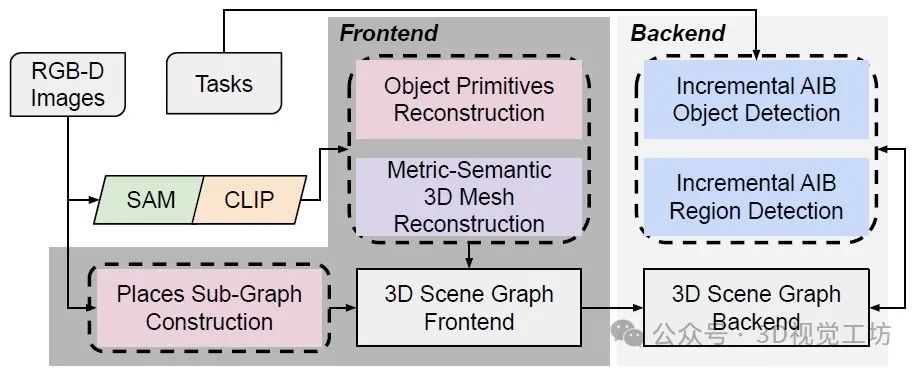
Clio的前端接收RGB-D傳感器數(shù)據(jù),并構(gòu)建物體基元的圖形,地點(diǎn)圖形以及背景的度量-語義3D網(wǎng)格。Clio的后端執(zhí)行增量聚合IB以根據(jù)用戶指定的任務(wù)列表對(duì)對(duì)象和區(qū)域進(jìn)行聚類。
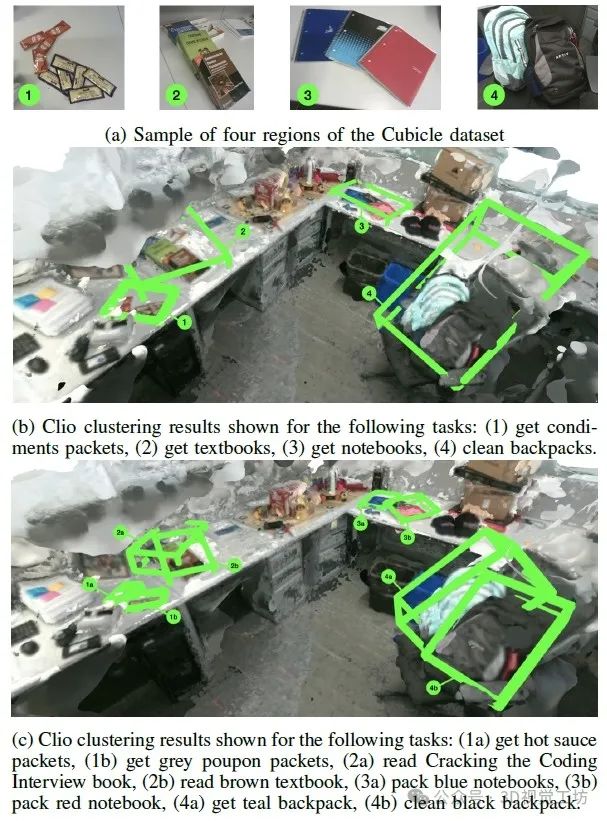
Cubicle數(shù)據(jù)集中需要任務(wù)提供對(duì)象定義糾正的部分示例。圖中展示了兩組任務(wù)的Clio聚類結(jié)果,分別列在(b)和(c)下;在聚類期間,任務(wù)列表中包含了14個(gè)額外的相同任務(wù),但為了清晰起見未顯示出來。
6. 實(shí)驗(yàn)結(jié)果
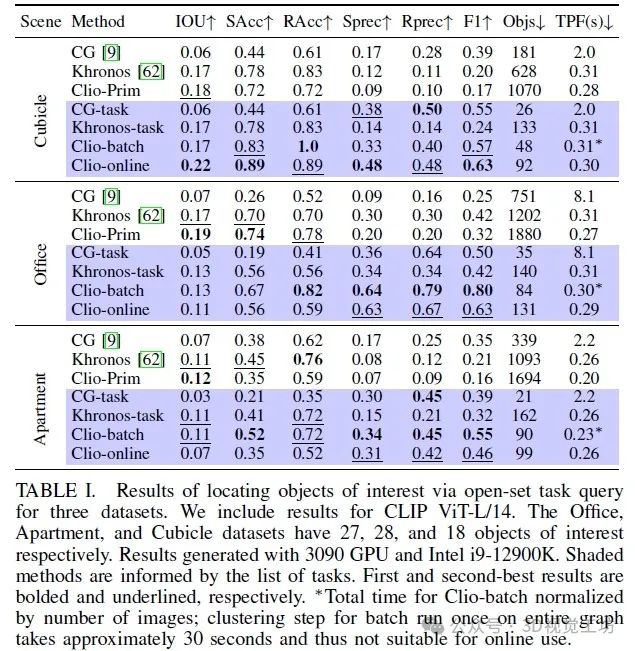
首先,我們觀察到任務(wù)驅(qū)動(dòng)的方法(表I中藍(lán)色填充的行)通常會(huì)在保留較少對(duì)象的同時(shí)獲得更好的性能指標(biāo)("Objs"列);這驗(yàn)證了我們的論斷,即度量-語義映射需要以任務(wù)為驅(qū)動(dòng)。具體來說,在某些情況下,與不考慮任務(wù)的基線相比,Clio 保留的對(duì)象數(shù)量要少一個(gè)數(shù)量級(jí)(與沒有信息瓶頸任務(wù)驅(qū)動(dòng)聚類的 Clio-Prim 中的對(duì)象數(shù)量相比)。其次,我們觀察到 Clio 在各個(gè)數(shù)據(jù)集上的表現(xiàn)大多優(yōu)于基線,在除了 Office 數(shù)據(jù)集的 IOU 和 SAcc 指標(biāo)之外的所有情況下,Clio-batch 和 Clio-online 排名都位居前兩位。Office 數(shù)據(jù)集中的許多對(duì)象(例如訂書機(jī)、自行車頭盔)通常被檢測(cè)為孤立的基元,因此我們看到任務(wù)的知識(shí)對(duì)這個(gè)數(shù)據(jù)集的影響較小,但仍然能夠改善所有其他指標(biāo)的性能。第三,我們觀察到 Clio 能夠在幾分之一秒內(nèi)運(yùn)行,比 ConceptGraphs 快約 6 倍;Khronos 和 Clio-Prim 也是實(shí)時(shí)運(yùn)行的,但在其他指標(biāo)方面性能不佳。最后,Clio-batch 和 Clio-online 在大多數(shù)情況下表現(xiàn)相似。它們性能上的差異是因?yàn)?Clio-online 是實(shí)時(shí)執(zhí)行的,可能根據(jù)需要丟棄幀以跟上相機(jī)圖像流。這種差異有時(shí)有助于性能指標(biāo),有時(shí)則會(huì)妨礙性能指標(biāo)的提升。
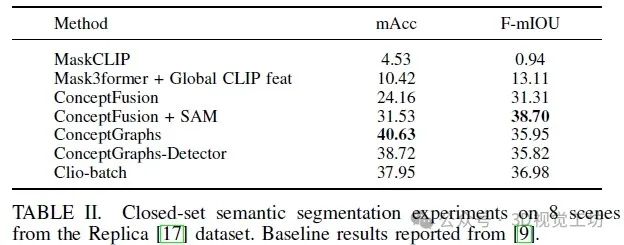
雖然 Clio 是為開放集檢測(cè)而設(shè)計(jì)的,但我們使用的評(píng)估方法在閉集 Replica 數(shù)據(jù)集上展示了我們的任務(wù)感知映射公式不會(huì)降低閉集映射任務(wù)的性能。在這里,我們的任務(wù)列表是每個(gè) Replica 場(chǎng)景中存在的對(duì)象標(biāo)簽集,其中每個(gè)標(biāo)簽都被更改為"{類別}的圖像"。對(duì)于 Clio,在創(chuàng)建場(chǎng)景圖后,我們將每個(gè)檢測(cè)到的對(duì)象分配給與其余對(duì)象具有最高余弦相似度的標(biāo)簽。為了提高 CLIP 在 Replica 數(shù)據(jù)集的低紋理區(qū)域的可靠性,我們通過將稠密 CLIP 特征合并到 Clio 中,包含了全局上下文的 CLIP 向量。我們報(bào)告準(zhǔn)確率作為類平均召回(mAcc)和頻率加權(quán)的平均交并比(f-mIOU)。表II 顯示,Clio 達(dá)到了與領(lǐng)先的零樣本方法相當(dāng)?shù)男阅埽砻魑覀兊娜蝿?wù)感知聚類不會(huì)降低閉集任務(wù)的性能。
由于手動(dòng)標(biāo)記語義 3D 區(qū)域是一個(gè)高度主觀的任務(wù),我們通過一個(gè)代理閉集任務(wù)評(píng)估了 Clio 區(qū)域的性能,其中 Clio 獲得了場(chǎng)景的可能房間標(biāo)簽集作為任務(wù)。我們?cè)谌齻€(gè)數(shù)據(jù)集中標(biāo)記了房間:Office、Apartment 和 Building。我們不分析 Cubicle 或 Replica 數(shù)據(jù)集,因?yàn)樗鼈冎话瑔蝹€(gè)房間。我們將 α 設(shè)為 0,以禁用對(duì)空任務(wù)的分配,因?yàn)槊總€(gè)地點(diǎn)都與至少一個(gè)房間標(biāo)簽相關(guān)聯(lián),并且我們?cè)谒袌?chǎng)景中保持所有參數(shù)不變。
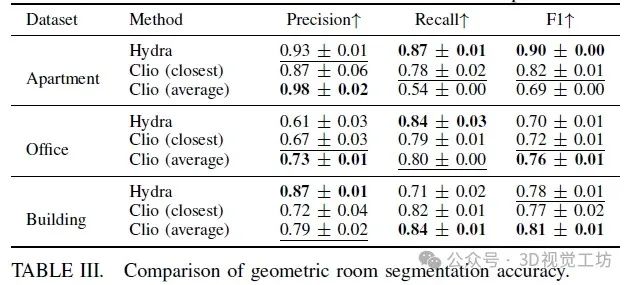
我們使用精度和召回率指標(biāo)來比較我們提出的 CLIP 嵌入向量關(guān)聯(lián)策略,Clio(平均),以及另一種更為樸素的策略,Clio(最近),后者使用從仍然可以從其中看到地點(diǎn)節(jié)點(diǎn)的最近圖像中獲取的嵌入向量。此外,我們使用 Hydra的純幾何房間分割方法作為閉集性能的比較點(diǎn)。這次比較的結(jié)果顯示在表III 中,該表還包括 F1 分?jǐn)?shù)作為摘要統(tǒng)計(jì)量。表III 中的結(jié)果是在 5 次試驗(yàn)中平均的,并報(bào)告了所有指標(biāo)的標(biāo)準(zhǔn)偏差。我們注意到,我們選擇的關(guān)聯(lián)策略在 Office 和 Building 場(chǎng)景中優(yōu)于 Hydra的純幾何方法和更為樸素的 Clio(最近),但在 Apartment 方面的 F1 分?jǐn)?shù)方面表現(xiàn)相對(duì)較差。這是由于場(chǎng)景的性質(zhì);Office 和 Building 場(chǎng)景包含帶標(biāo)簽的開放平面房間,需要語義知識(shí)來檢測(cè)(例如 Office 場(chǎng)景中的小廚房或 Building 場(chǎng)景中的樓梯間)。Apartment 主要包含幾何上不同的房間,這些房間可以用[7]中的幾何方法進(jìn)行直接分割,而 Clio 則會(huì)過度分割,這可以從我們的方法的高精度但低召回中看出。另一方面,與 Office 中存在的連接的語義相似區(qū)域相比,導(dǎo)致了欠分割和較低的召回率。
7. 限制性
盡管實(shí)驗(yàn)結(jié)果令人鼓舞,但我們的方法存在多個(gè)限制。首先,盡管我們的方法是zero-shot,并且不受任何特定基礎(chǔ)模型的限制,但在實(shí)施過程中確實(shí)繼承了一些基礎(chǔ)模型的限制,比如對(duì)提示調(diào)整的強(qiáng)烈敏感。例如,我們討論了不同CLIP模型對(duì)性能的影響。其次,我們目前在合并兩個(gè)基元時(shí)平均了CLIP向量,但考慮更具體的方法來結(jié)合它們的語義描述可能會(huì)更有趣。第三,如果兩個(gè)基元分別對(duì)同一任務(wù)具有相似的余弦相似度,但任務(wù)某種方式上需要將它們區(qū)分為單獨(dú)的對(duì)象時(shí),Clio可能會(huì)過度聚類(例如,我們可能希望在擺放餐具時(shí)將叉子與刀子區(qū)分開來,盡管它們可能對(duì)任務(wù)有相似的相關(guān)性)。最后,我們目前考慮的是相對(duì)簡(jiǎn)單的單步任務(wù)。然而,將所提出的框架擴(kuò)展到與一組高級(jí)復(fù)雜任務(wù)一起工作將是可取的。
8. 總結(jié)
我們提出了一種面向任務(wù)的三維度量語義映射的形式化方法,其中機(jī)器人被提供了一系列自然語言任務(wù),并且必須創(chuàng)建一個(gè)足以支持這些任務(wù)的地圖,其粒度和結(jié)構(gòu)是足夠的。我們已經(jīng)表明,這個(gè)問題可以用經(jīng)典的信息瓶頸來表達(dá),并且已經(jīng)開發(fā)了聚合信息瓶頸算法的增量版本作為解決策略。我們已將所得算法集成到實(shí)時(shí)系統(tǒng)Clio中,該系統(tǒng)在機(jī)器人探索環(huán)境時(shí)構(gòu)建一個(gè)三維場(chǎng)景圖,包括任務(wù)相關(guān)的對(duì)象和區(qū)域。我們還通過展示它可以在Spot機(jī)器人上實(shí)時(shí)執(zhí)行并支持拾取和放置移動(dòng)操作任務(wù),證明了Clio對(duì)機(jī)器人學(xué)的相關(guān)性。
-
傳感器
+關(guān)注
關(guān)注
2567文章
53143瀏覽量
768842 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29829瀏覽量
213519
原文標(biāo)題:MIT最新開源!Clio:如何確定機(jī)器人語義地圖的細(xì)粒度?
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智能制造工業(yè)機(jī)器人技術(shù)發(fā)展趨勢(shì)
Commvault Cloud平臺(tái)如何應(yīng)對(duì)勒索軟件攻擊
工業(yè)機(jī)器人的特點(diǎn)
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
破解透明物體抓取難題,地瓜機(jī)器人 CASIA 推出幾何和語義融合的單目抓取方案|ICRA 2025
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
《具身智能機(jī)器人系統(tǒng)》第10-13章閱讀心得之具身智能機(jī)器人計(jì)算挑戰(zhàn)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
《人形機(jī)器人產(chǎn)業(yè)地圖(2024)》重磅發(fā)布!

Perforce Helix Core通過ISO 26262認(rèn)證!為汽車軟件開發(fā)團(tuán)隊(duì)提供無限可擴(kuò)展性、細(xì)粒度安全性、文件快速訪問等






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論