 驅動鈦絲(SMA)的可靠性設計(9) 鈦絲的驅動電路控制(下)
驅動鈦絲(SMA)的可靠性設計(9) 鈦絲的驅動電路控制(下)
【前言】
形狀記憶合金(Shape memory alloy, SMA),也叫形態記憶合金、鈦鎳記憶合金,它是由Ti(鈦)-Ni(鎳)材料組成,經過多道工序制成的絲,我們簡稱鈦絲,可以通過電路驅動鈦絲發生運動。相比于傳統的電機、電磁鐵動力,鈦絲是一種新型的動力元件。鈦絲驅動技術目前已經在航空航天、洲際導彈、無人機、手機、汽車、機器人等科技領域投入使用。
本文通過分享、普及鈦絲驅動技術的可靠性設計,方便大家在機械電子工業設計等領域快速有效的轉化為科技成果。
第9節【鈦絲的驅動電路控制(下)】
本節要說的是驅動鈦絲電路控制的【驅動保持控制】、【環境溫度的補償設計】、【溫度閉環控制設計】、【任意定位驅動控制】、【矩陣式驅動控制】。
在講解前,我們需要引入軟件設計控制中的一個常見的設計應用:PWM驅動,電子工程師和軟件工程師都非常熟悉這個驅動模式。
本文中提及的電流參數,均表示PWM驅動時的電流平均值或有效值。
6.【驅動保持控制】
有些產品的功能要求我們的驅動機構在驅動后,還要保持驅動后的狀態,此時,需要在我們在上一節提到的恒功驅動電路方案的基礎上,進一步做軟件設計。
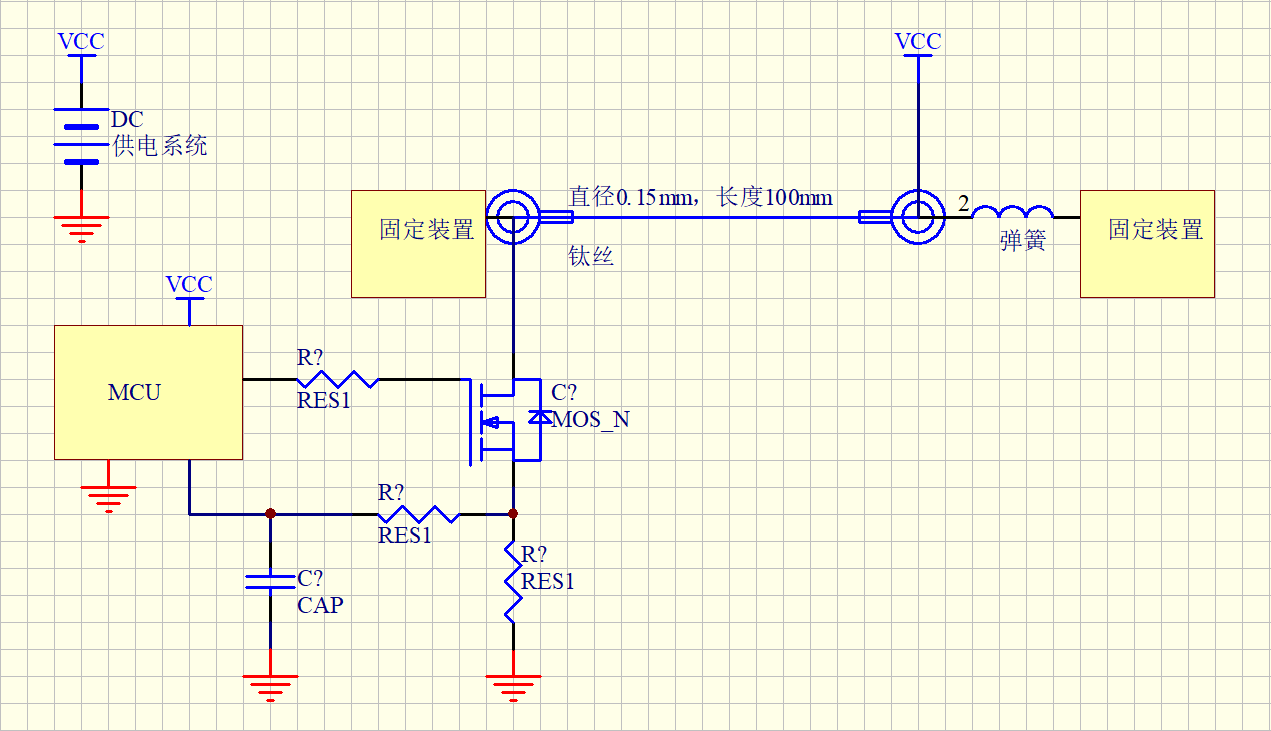
工作原理:
驅動保持控制的兩個步驟:
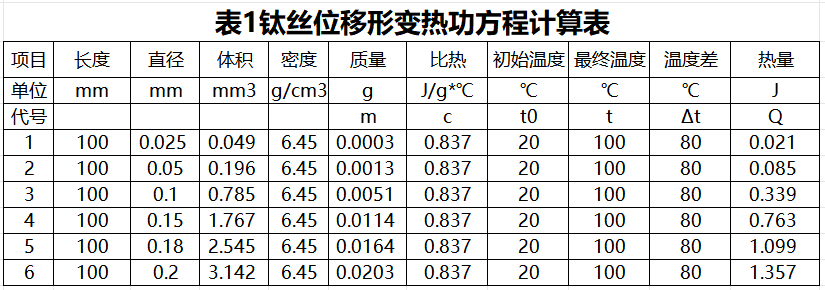
1)恒功驅動,參考《表1鈦絲位移形變熱功方程模擬計算表》對鈦絲通電驅動,讓執行機構完成執行動作。
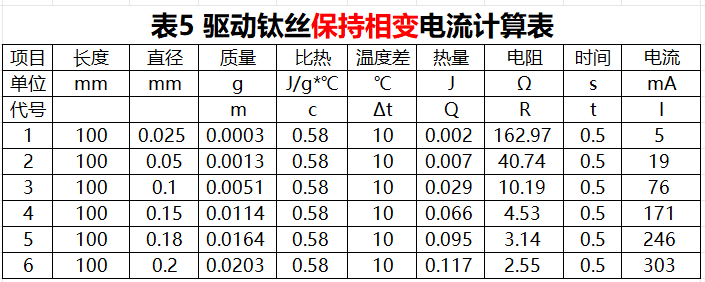
2)驅動保持,根據產品實際的結構空間情況,計算或測量溫度的損失,做溫度補償電流控制,使其驅動機構內的鈦絲的溫度始終維持在100°,波動區間在10°的范圍。
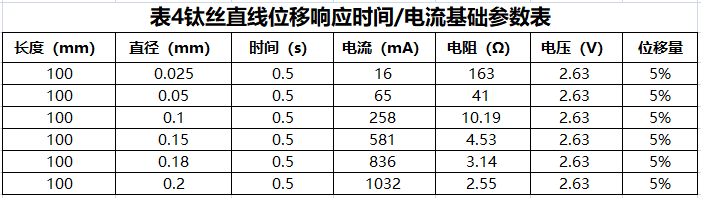
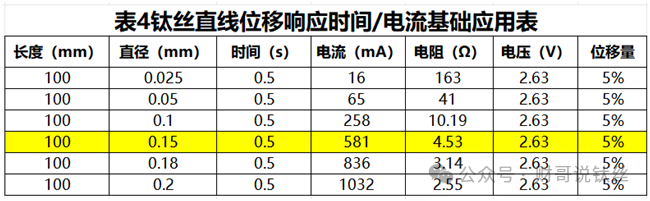
例如規格:?0.15mm,長度100mm的鈦絲,從環境溫度20°,通過0.5S的響應時間,達到驅動溫度100°,帶入Q=cm(t?t0)。我們得到需要的驅動電流是 581mA,這個時候我們的驅動機構完成了第一步的驅動執行動作。
接著,我們假定鈦絲處于理想的懸空情況下的空氣當中,100°空氣的比熱容值是0.242 Kcal/Kg℃,根據換算單位1 Kcal/Kg℃ = 2.389 J/g*℃,?我們得到100°空氣的比熱容值是0.58 J/g*℃
?
帶入《驅動鈦絲(SMA)計算模型》表5得到規格?0.15mm,長度100mm的鈦絲所需保持電流約171mA。
這個時候,我們通過改變PWM的占空比,即可得到我們所需的電流值,達到驅動保持的目的。
注意事項:不同的產品實際的結構空間的密閉性或空間大小不一樣,空氣的比熱容值會有所偏差,我們需要結合產品本身的實際情況來調整這個值。
應用案例:手機鏡頭防抖、云臺防抖、機器人、無人機拓展功能、汽車風路控制、汽車流體控制。
7.【環境溫度的補償設計】
我們在第6節7點中提到鈦絲驅動需要考慮環境溫度補償設計,可以通過電路設計和軟件控制來消除環境溫度對鈦絲的驅動帶來的影響。
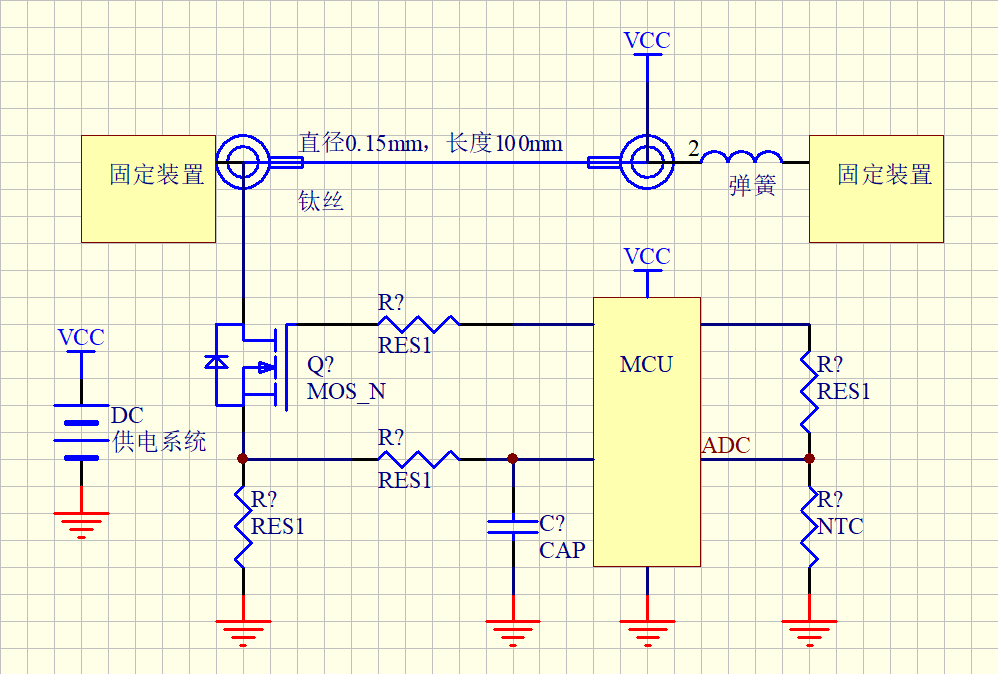
工作原理:
我們在恒功驅動的基礎上,增加一個普通的電阻和NTC熱敏電阻,這樣就可以做到簡單有效的環境溫度的補償設計。
考慮到節能的問題,我們需要MCU提供一個端口,提供高電平作為環境溫度檢測的供電系統,當NTC熱敏電阻伴隨環境溫度變化而發生變化時,MCU還需提供一個ADC腳來采集NTC變化的電壓。我們再通過軟件的計算補償,實時的調整PWM的輸出占空比,消除環境溫度的偏差,達到對鈦絲穩定驅動的閉環效果。
例如規格:?0.15mm,長度100mm的鈦絲,從環境溫度20°,通過0.5S的響應時間,達到驅動溫度100°,帶入Q=cm(t?t0),我們得到需要的驅動電流是 581mA。
當環境溫度降低10°,我們就給Q=cm(t?t0+10°),我們得到需要的驅動電流是 616mA。
當環境溫度提升10°,我們就給Q=cm(t?t0-10°),我們得到需要的驅動電流是 543mA。
通過環境溫度補償設計,就可以消除環境溫度的差異對驅動機構帶來的影響,進一步提升了鈦絲驅動的可靠性和穩定性。
注意事項:軟件工程師一般情況下,會考慮經濟問題,充分利用MCU的端口,如需做環境溫度的補償設計,需要預留2個端口,一個ADC,一個任意可以提供高電平的端口。
應用案例:手機鏡頭防抖、云臺防抖、機器人、無人機拓展功能、汽車風路控制、汽車流體控制。
8.【溫度閉環控制設計】
在一些可靠性要求較高的產品應用當中,需要對鈦絲驅機構實現溫度監測反饋和閉環控制。驅動鈦絲極小的線徑導致了一般的溫度檢測傳感器難以準確測量鈦絲的實際溫度,我們可以結合鈦絲的物理特性,通過測量鈦絲的電壓和電阻,同樣可以達到閉環監測目的。
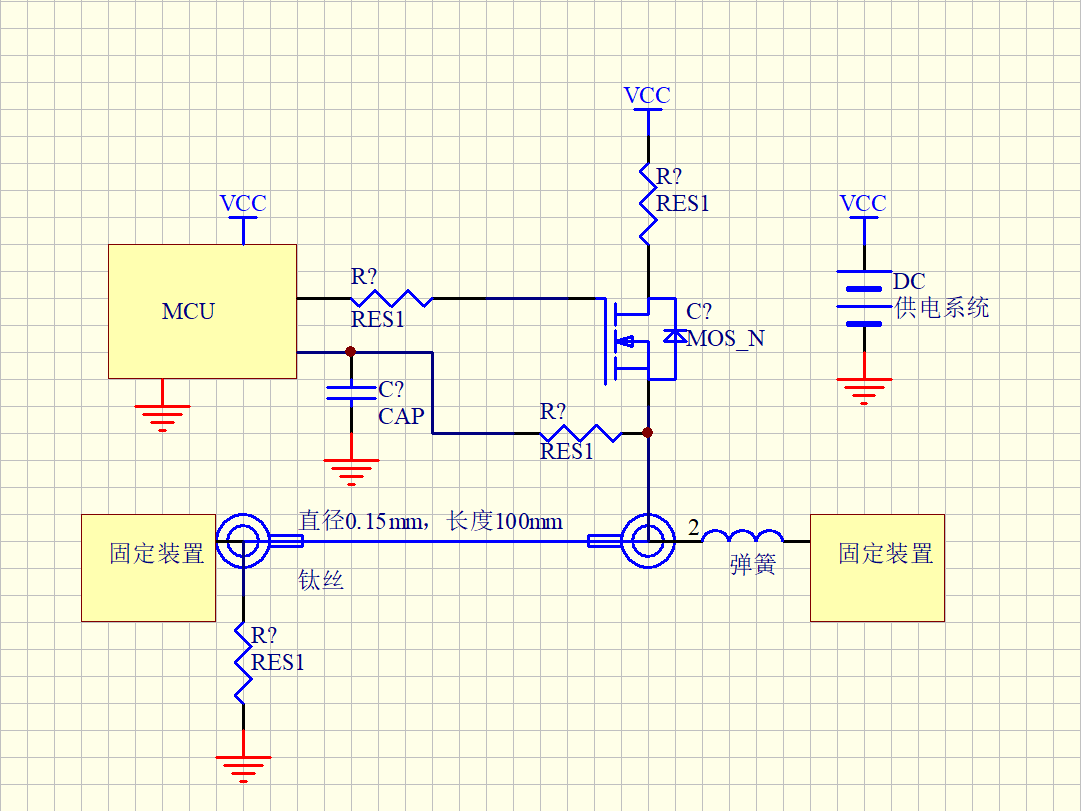
工作原理:
我們在恒功驅動的基礎上,將鈦絲置于MOS對地的位置,通過鈦絲靠近MOS的一端采集電壓數據給到MCU的ADC,由于鈦絲本身的電阻是隨溫度的變化而變化,這樣就可以實時監控鈦絲的驅動過程中的對應溫度變化情況。
例如規格:?0.15mm,長度100mm的鈦絲,我們根據《表2鈦絲電阻計算表》R=ρL/S,通過帶入電阻率計算得:
奧氏體狀態下的電阻值是5.66Ω
馬氏體狀態下的電阻值是4.53Ω
我們在第6節中提到,鈦絲的相變溫度是個范圍值,且存在逆向滯后的現象,且有大約20°的溫度區間。我們需要理解:
從95°上升到115°完成完整的位移驅動(大約20°的溫度區間)
5.66Ω—>4.53Ω
從105°下降到85°以后,開始位移恢復(大約20°的溫度區間)
4.53Ω—>5.66Ω
通過實時監測驅動鈦絲的電阻值,就可以間接反饋驅動機構的溫度和位移是否達標,再結合軟件算法,實時動態修正和調整驅動機構的電流和溫度,同時實現驅動機構的交互式反饋,確保鈦絲驅動穩定工作。
注意事項:無
應用案例:手機鏡頭防抖、云臺防抖、機器人、無人機拓展功能、汽車風路控制、汽車流體控制。
9.【任意定位驅動控制】
工作原理:
任意定位驅動控制是在溫度閉環控制設計的基礎上,做更加精細的軟件控制思路實現位移或定位的精準控制。
注意事項:
我們做任意位置驅動或任意位移點的精準控制,就需要精確知道:
奧氏體—>馬氏體(95°—>115°)5.66Ω—>4.53Ω
馬氏體—>奧氏體(105°—>85°)4.53Ω—>5.66Ω
采用任意定位驅動控制電路和配套軟件算法,通過監測電阻,實時調節電流和溫度,就可以實現驅動鈦絲位移或定位的精準、實時動態控制狀態。
應用案例:手機鏡頭防抖、云臺防抖、機器人、無人機拓展功能、汽車風路控制、汽車流體控制。
10.【矩陣式驅動控制】
矩陣式驅動一般應用于數量較多或大規模的鈦絲驅動機構的情況下。
矩陣式驅動有很多種類,電子工程師一般都可以根據自己的實際情況靈活調整,本案例給出其中一種表現形式,供大家參考。
矩陣式驅動的重點是結合MCU本身的資源能力,給出最有效的矩陣設計思路,軟件工程師通過矩陣的數量設定合適的周期和對應的占空比。
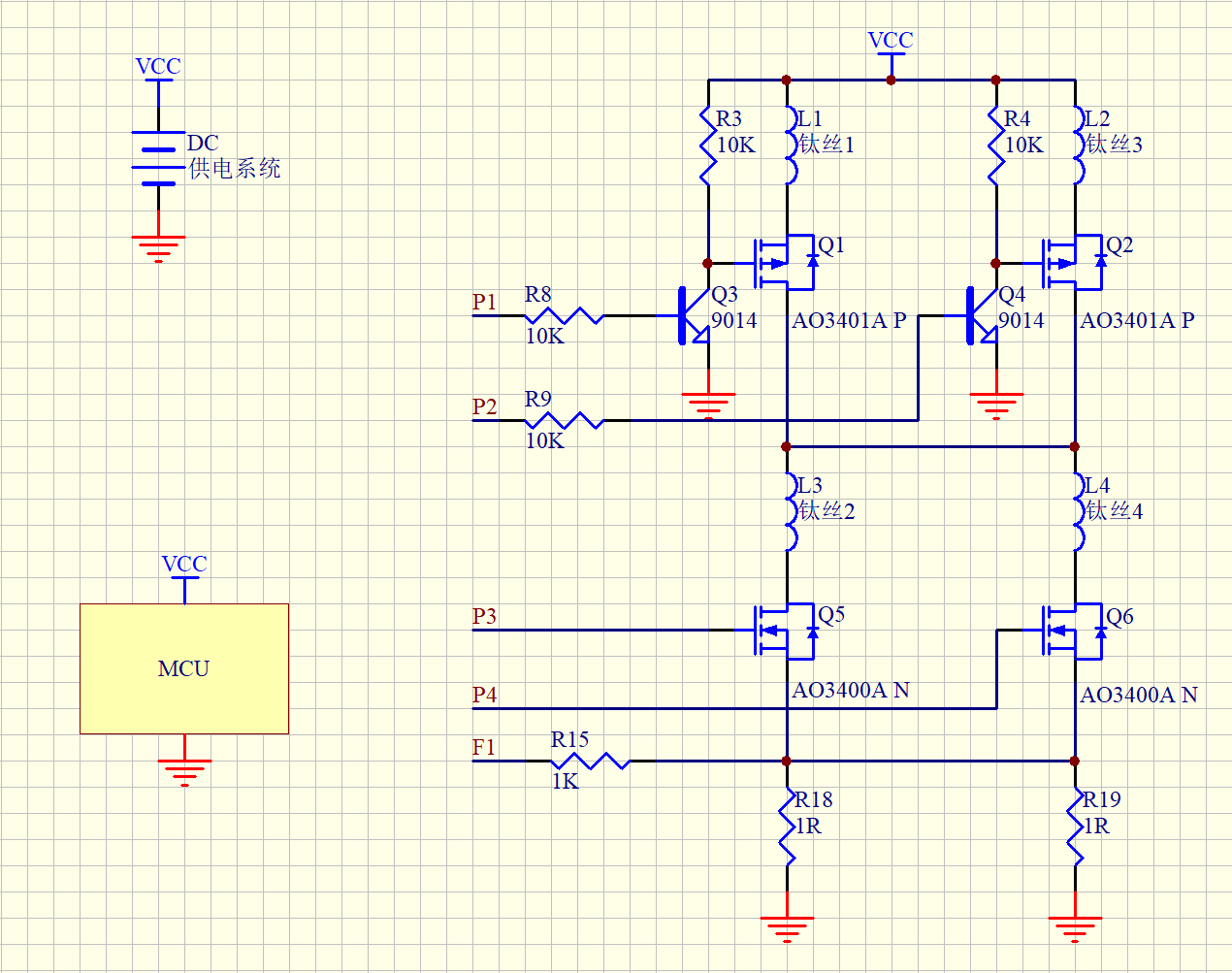
工作原理:
本例依然采用PWM恒功驅動的設計方案,驅動4組鈦絲驅動機構。
通過軟件控制:
P1、P2、P3、P4實現:
驅動鈦絲的L1、L2或L3、L4或L1、L4或 L2、L3的4種驅動狀態,達到矩陣控制和交叉矩陣控制的目的。
本例中的軟件控制可以采用4組PWM,也可以采用2組PWM,我們的軟件工程師需要結合MCU的資源去靈活調整。
注意事項:
矩陣式驅動方案需要足夠的供電系統的支持,我們需要考慮同時驅動多少數量的鈦絲。單片機的頻率是否滿足掃描周期的占空比控制。
應用案例:手機鏡頭防抖、云臺防抖、機器人、無人機拓展功能、汽車風路控制、汽車流體控制。
為了讓驅動鈦絲在工業應用中切實落地,財哥制作整理了包括《財哥說鈦絲視頻》、《SMA常見電路控制方案》、《驅動鈦絲(SMA)計算模型》、《驅動鈦絲(SMA)常見結構模型》等系列資源供大家參考,歡迎大家的關注和交流,請點贊收藏轉發!
鈦絲科技 出品
作者財哥說鈦絲
審核編輯 黃宇
-
SMA
+關注
關注
4文章
236瀏覽量
25582 -
驅動電路
+關注
關注
155文章
1566瀏覽量
109412 -
電路控制
+關注
關注
1文章
42瀏覽量
10492
發布評論請先 登錄
相關推薦
非晶硅反熔絲FPGA提升系統可靠性
驅動鈦絲(SMA)的可靠性設計(2) 不同廠家生產的鈦絲有什么區別
驅動鈦絲(SMA)的可靠性設計(1) 鈦絲的選型和適配
驅動鈦絲(SMA)的可靠性設計(2) 不同廠家生產的鈦絲有什么區別

電子驅動鈦絲(SMA)的可靠性設計(補1) 補充說明鈦絲的作用和控制

驅動鈦絲(SMA)的可靠性設計(8) 鈦絲的驅動電路控制(上)
驅動鈦絲(SMA)的可靠性設計(5)位移設計
驅動鈦絲(SMA)的可靠性設計(3)響應時間的設計
驅動鈦絲(SMA)的可靠性設計(6) 溫度控制
驅動鈦絲(SMA)的可靠性設計(7) 接觸面設計
驅動鈦絲(SMA)的可靠性設計(10) 供電線路材料的影響和選擇
驅動鈦絲(SMA)的可靠性設計(11) 加工生產的影響
驅動鈦絲(SMA)的應用(1)汽車腰托支撐按摩氣閥模塊





 工商網監
工商網監
評論