") MPS磁性位置傳感器MA600在機(jī)器人中的應(yīng)用
MPS磁性位置傳感器MA600在機(jī)器人中的應(yīng)用

“實(shí)名羨慕!為什么你家的機(jī)器人精準(zhǔn)到能!繡!花!”
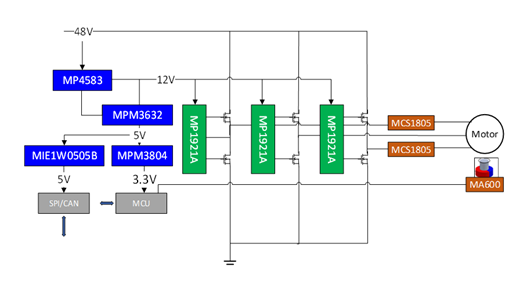
機(jī)器人的執(zhí)行單元需要精確的位置定位來(lái)實(shí)現(xiàn)靈敏的機(jī)械控制。MA600 采用 TMR 技術(shù)檢測(cè)磁場(chǎng),是一款專用于運(yùn)動(dòng)控制的高靈敏度、高帶寬、高分辨率的磁性位置傳感器。
1.MA600 的關(guān)鍵規(guī)格
高精度:典型 0.2° INL,系統(tǒng)內(nèi)校準(zhǔn)后:小于 0.1° INL,包含片上查找表;
高帶寬高分辨率,最高 14.5 位(±3σ);
無(wú)內(nèi)部滯后,無(wú)延遲,減少速度帶來(lái)的誤差 ;
應(yīng)用靈活,適配多種應(yīng)用場(chǎng)景,支持最低磁場(chǎng)強(qiáng)度:20mT,支持軸裝和側(cè)裝。
2. 誤差的定義
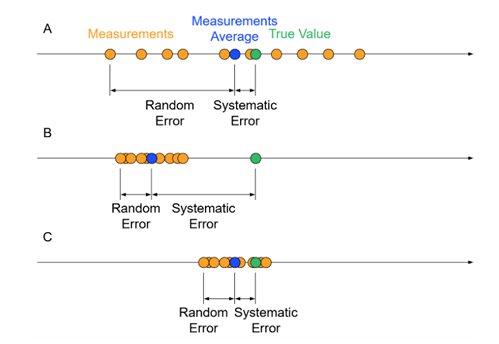
為了實(shí)現(xiàn)精準(zhǔn)的位置定位,工程師在選型時(shí),最關(guān)注的就是位置測(cè)量精度。檢測(cè)誤差被定義為一個(gè)參數(shù)的測(cè)量值與其真實(shí)值之間的差異,由兩個(gè)部分構(gòu)成:系統(tǒng)誤差和隨機(jī)誤差。磁性編碼器的系統(tǒng)誤差由 INL,磁誤差,延時(shí)三部分組成。隨機(jī)誤差由分辨率表示。
從下圖可以看到誤差組成對(duì)最終結(jié)果的影響,綠色圓形為真實(shí)值,藍(lán)色為系統(tǒng)誤差,黃色是隨機(jī)誤差。如果要達(dá)到比較好的精度,必須同時(shí)保證系統(tǒng)誤差和隨機(jī)誤差。
2.1 分辨率
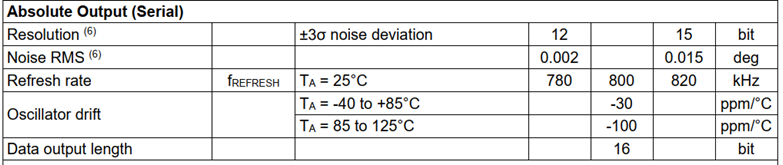
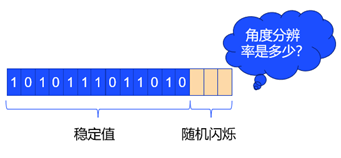
從規(guī)格可以看到,MA600 數(shù)據(jù)輸出位數(shù)是 16 位,角度分辨率是 12 位到 15 位。實(shí)際角度分辨率到底應(yīng)該以哪個(gè)數(shù)值為準(zhǔn)?
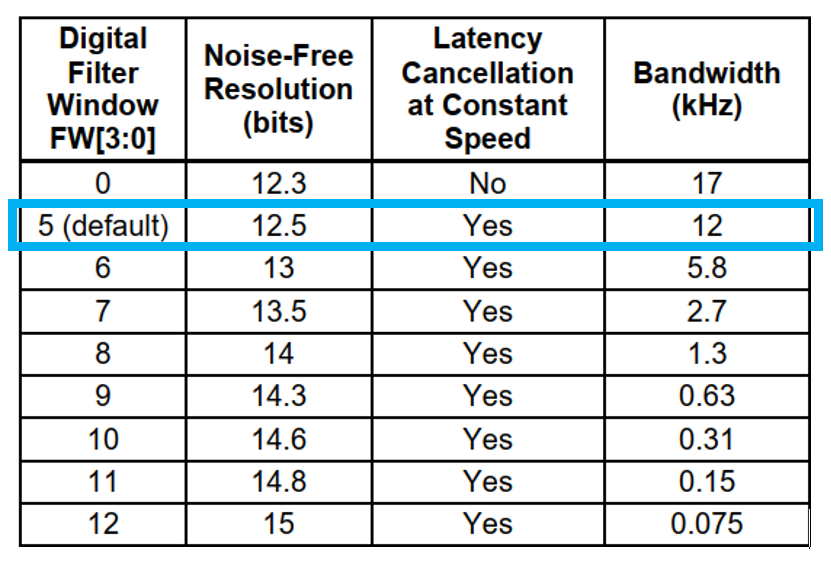
如果按照分辨率 16 位計(jì)算,角度精度是 0.0055 度,只有當(dāng)實(shí)際噪聲峰峰值小于 0.0055 度時(shí),才能用數(shù)字輸出位數(shù)表示角度分辨率,在大多數(shù)情況下噪聲峰峰值通常超過(guò) AD 步長(zhǎng)。所以實(shí)際分辨率應(yīng)該通過(guò)噪聲峰峰值計(jì)算,即以 12 位到 15 位為準(zhǔn),具體可以通過(guò)寄存器設(shè)置,MA600 默認(rèn) 12.5 位。
如果角度分辨率是 13 位,數(shù)據(jù)輸出長(zhǎng)度是 16 位,那么在讀取角度寄存器的會(huì)看到輸出端的最后三位數(shù)據(jù)隨機(jī)閃爍,這是由噪聲導(dǎo)致的:
2.2 INL (積分非線性)
積分非線性是衡量位置傳感器在整個(gè)測(cè)量范圍內(nèi)輸出誤差的一個(gè)重要指標(biāo)。它描述了傳感器輸出與理想擬合直線之間的最大偏差。一個(gè)低 INL 值意味著傳感器的輸出更加接近理想直線,從而提供更準(zhǔn)確的測(cè)量結(jié)果。

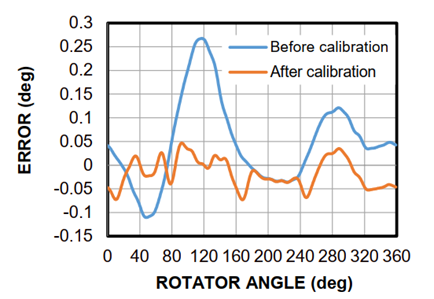
MA600 的 INL 在環(huán)境溫度 25℃,磁場(chǎng)強(qiáng)度為 45mT 的條件下,未經(jīng)過(guò)用戶校準(zhǔn)的 INL 典型值為 0.2 度,最大不超過(guò) 0.6 度。
并且MA600 具有用戶校準(zhǔn)功能,可以校準(zhǔn)因?yàn)榇盆F配置不當(dāng)引起的誤差,包括磁鐵的不對(duì)齊和磁鐵本身的缺陷等。通過(guò)用戶校準(zhǔn),MA600 的 INL 可以被減小到 0.1° 以內(nèi)。
2.3 延時(shí) Latency
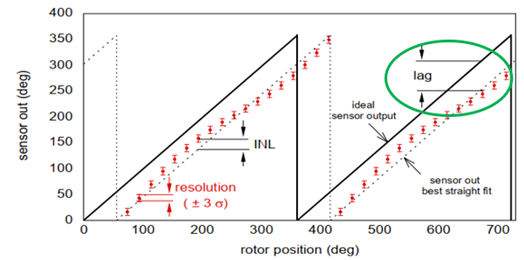
延時(shí)是指數(shù)據(jù)準(zhǔn)備好被讀取的瞬間與軸通過(guò)該位置的瞬間之間的時(shí)間差。這個(gè)時(shí)間差會(huì)導(dǎo)致角度上的滯后,進(jìn)而造成角度誤差。下圖展示了傳感器輸出與理想直線擬合之間的偏差,延時(shí)造成的角度誤差即圖中的 lag,計(jì)算公式為:
lag = latency × v
MA600 內(nèi)部做了延時(shí)補(bǔ)償,理論上不存在轉(zhuǎn)速造成的誤差。對(duì)比不同產(chǎn)品在 30krpm 下,由延時(shí)造成的角度誤差。
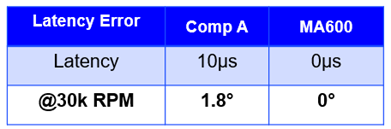
當(dāng)延時(shí)為 10us 時(shí),Comp A 的角度誤差為 1.8 度,而 MA600 的誤差為 0 度。這表明在高速旋轉(zhuǎn)的場(chǎng)景,MA600 能夠提供非常精確的角度測(cè)量。
2.4 溫漂
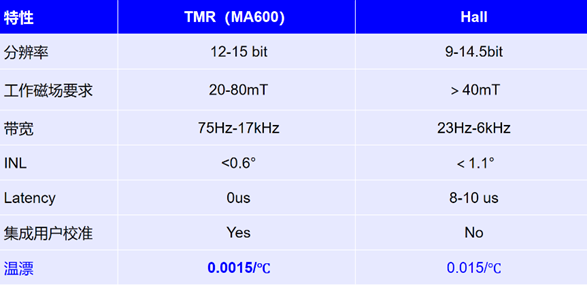
傳感器對(duì)溫度變化的敏感性也會(huì)引起輸出信號(hào)的非線性變化或偏移。TMR 相比 Hall 有更強(qiáng)的溫度穩(wěn)定性,可以通過(guò)對(duì)比 Hall 傳感器和 TMR 傳感器 (MA600)看出,Hall 的典型溫漂是 0.015deg/℃,MA600 是 0.0015deg/℃。在電機(jī)關(guān)節(jié)里面,工作溫度達(dá)到 60 度,80 度都是有可能的。TMR 能保證溫度變化下的角度穩(wěn)定性。
3. 實(shí)際應(yīng)用
3.1 磁鐵選型
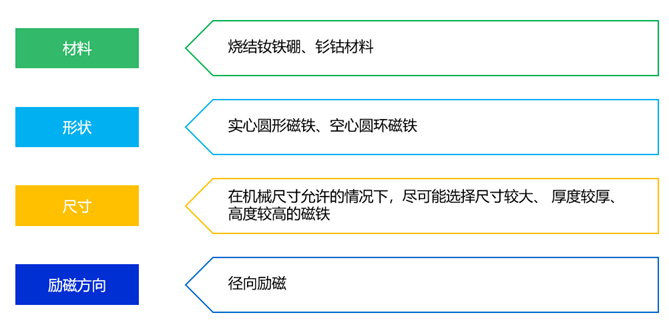
3.2 MA600 安裝位置仿真磁鐵材料和形狀確定之后,可以通過(guò) MPS 的線上仿真軟件進(jìn)行磁場(chǎng)仿真,確定MA600 的安裝位置。入口在 MPS 官網(wǎng)-設(shè)計(jì)-位置傳感器設(shè)計(jì)支持-在線磁計(jì)算工具。
仿真根據(jù)實(shí)際裝配位置選擇軸裝和側(cè)裝,MA600 允許的工作磁場(chǎng)強(qiáng)度是 20-200mT,為得到良好的初始線性度,推薦MA600 的磁場(chǎng)范圍是 20-80mT。
具體操作步驟參考 MPS 中文論壇的帖子:MA600 磁鐵如何選型。3.3 INL 校準(zhǔn):上位機(jī)一鍵校準(zhǔn)

MA600 在應(yīng)用時(shí),可以通過(guò)用戶校準(zhǔn)功能將 INL 校準(zhǔn)到 0.1 度以內(nèi),實(shí)現(xiàn)更高的精度。我們提供了測(cè)試板,通訊工具和上位機(jī)軟件,可實(shí)現(xiàn)一鍵校準(zhǔn)。
該校準(zhǔn)方式為電機(jī)轉(zhuǎn)動(dòng)校準(zhǔn),使用光編作為參考信號(hào),光編的 ABZ 連接到測(cè)試板上,測(cè)試板連接到上位機(jī),將待測(cè)電機(jī)、光編、驅(qū)動(dòng)電
機(jī)同軸安裝, 驅(qū)動(dòng)電機(jī)帶動(dòng)待測(cè)電機(jī)旋轉(zhuǎn),再通過(guò)上位機(jī)軟件實(shí)現(xiàn)自動(dòng)校準(zhǔn)。
3.4 INL 校準(zhǔn):電機(jī)勻速轉(zhuǎn)動(dòng)校準(zhǔn)
用戶校準(zhǔn)也可以在沒(méi)有參考編碼器的情況下進(jìn)行,以速度 × 時(shí)間作為參考,計(jì)算芯片待校準(zhǔn)角度處的校準(zhǔn)值。
步驟如下:
1) 讓電機(jī)以恒定速度旋轉(zhuǎn),推薦最大轉(zhuǎn)速為 5krpm。
2) 校準(zhǔn)流程如下:
為了準(zhǔn)確擬合誤差曲線,計(jì)算誤差曲線的一次,二次,四次和八次諧波,作為MA600 輸出的函數(shù)。
每 11.25°,使用擬合曲線計(jì)算校準(zhǔn)值(度),并將得到的 32 個(gè)值從度轉(zhuǎn)換為十進(jìn)制。
將 32 個(gè)校準(zhǔn)值存儲(chǔ)到 NVM 中。
4. MA600 技術(shù)支持
MA600 相關(guān)的應(yīng)用資料和例程可以通過(guò)添加工程師微信獲取!
* 申請(qǐng)備注:公司/學(xué)校+應(yīng)用
MA600 應(yīng)用手冊(cè)
磁鐵選型指南
MA600 例程
MA600 上位機(jī)軟件及應(yīng)用手冊(cè)
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29829瀏覽量
213485 -
定位
+關(guān)注
關(guān)注
5文章
1456瀏覽量
36032 -
位置傳感器
+關(guān)注
關(guān)注
3文章
282瀏覽量
28180
原文標(biāo)題:好準(zhǔn)!機(jī)器人精確定位的秘密——位置傳感器 MA600
文章出處:【微信號(hào):MPS芯源系統(tǒng),微信公眾號(hào):MPS芯源系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論