") 先楫半導(dǎo)體hpm_apps v1.7.0上線
先楫半導(dǎo)體hpm_apps v1.7.0上線

新增
1
HPM 雙網(wǎng)口環(huán)網(wǎng)通信方案
HPM6700/6400系列微控制器支持雙以太網(wǎng)控制器,能夠?qū)崿F(xiàn)最高千兆的通信速率。在本方案中,主機使用雙網(wǎng)口的 PC 電腦,從機為 HPM6750EVK2。所有設(shè)備通過雙網(wǎng)口串聯(lián),最終環(huán)回至主機,形成環(huán)網(wǎng)結(jié)構(gòu)。主機與從機之間的通信基于以太網(wǎng) TCP/IP 協(xié)議。
本方案的優(yōu)缺點
優(yōu)點:
環(huán)網(wǎng)結(jié)構(gòu)提供通信鏈路冗余,確保當一端斷開時,另一端仍可正常通信。
無需使用交換機,減少了設(shè)備成本。
布線簡單、耗材少,僅需串聯(lián)所有設(shè)備。
缺點:
由于使用非硬件交換機芯片,數(shù)據(jù)交換依賴底層軟交換,導(dǎo)致通信速率和實時性受到限制。
注意事項:
在環(huán)網(wǎng)結(jié)構(gòu)中,主機發(fā)出的廣播或組播幀在接收后不可再次轉(zhuǎn)發(fā),否則可能導(dǎo)致死循環(huán),進而引發(fā)網(wǎng)絡(luò)風(fēng)暴。
環(huán)網(wǎng)組網(wǎng)拓撲結(jié)構(gòu)如下:
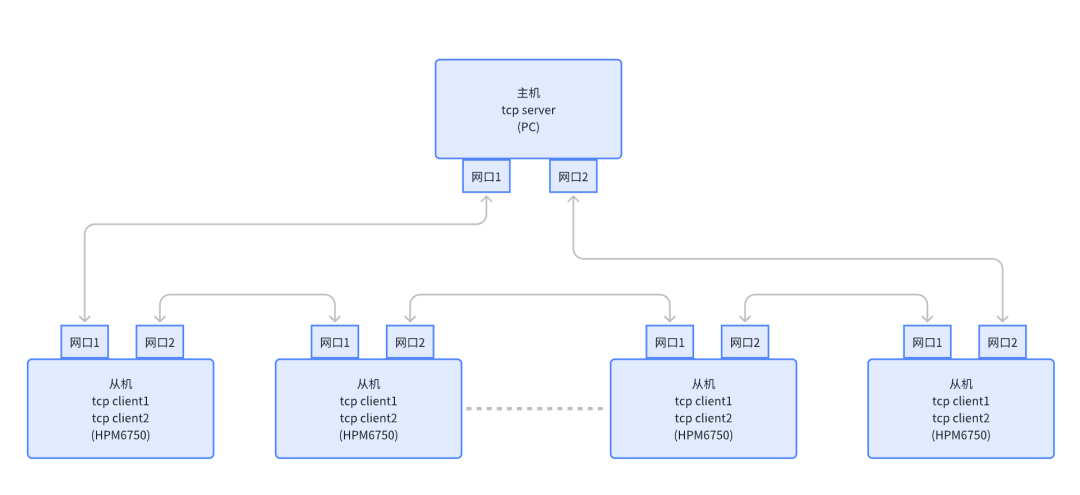
說明:
整個系統(tǒng)中只有一個主機,其余設(shè)備均為從機。
主機與所有從機如上圖所示串聯(lián),最終環(huán)回至主機。
主機和所有從機均為雙網(wǎng)口設(shè)備,因此每個設(shè)備擁有兩個 MAC 地址和兩個獨立的 IP 地址,且 MAC 和 IP 是綁定對應(yīng)的。
主機和從機必須位于同一網(wǎng)段下,且每個端口的 IP 地址不可重復(fù)。
主機建立一個 TCP 服務(wù)器,綁定到 IP_ADDR_ANY 及任意地址。這意味著雖然只建立了一個 TCP 服務(wù)器,但來自兩個網(wǎng)口的有效 TCP 客戶端數(shù)據(jù)都會被該服務(wù)器接收。
從機在底層邏輯中判斷以太網(wǎng)數(shù)據(jù)包的 MAC 地址及類型。若數(shù)據(jù)包為自身數(shù)據(jù)、廣播包或組播包,則遞交給上層協(xié)議棧處理;其余數(shù)據(jù)包則透傳到另一個網(wǎng)口發(fā)送。同時,廣播包和組播包在遞交上層協(xié)議棧處理時,也需透傳到另一個網(wǎng)口發(fā)送。
每個從機建立兩個 TCP 客戶端,并各自綁定到自身的 IP 地址。從機需知曉服務(wù)器連接的兩個 IP 地址,兩個 TCP 客戶端分別嘗試連接這兩個服務(wù)器 IP,連接成功后即可確定當前 TCP 客戶端對應(yīng)的網(wǎng)口環(huán)回連接的是主機的哪個網(wǎng)口。
當從機的物理連接斷開(如網(wǎng)線斷開,PHY 斷連)時,將立即檢測到斷連并報錯。如圖所示,從機1的網(wǎng)口2和從機2的網(wǎng)口1會立即檢測到斷連并報錯。
若從機的物理連接未斷開,但環(huán)路中存在斷連,則需通過 TCP 嗅探來確認斷連。如圖所示,從機3的網(wǎng)口1和從機4的網(wǎng)口1不會立即檢測到斷連,需要通過 TCP 嗅探確認。具體的 TCP 嗅探間隔和時長可由軟件設(shè)置。
從機支持斷連后自動重連功能。
2
HPM MCU做Ethercat主站應(yīng)用方案
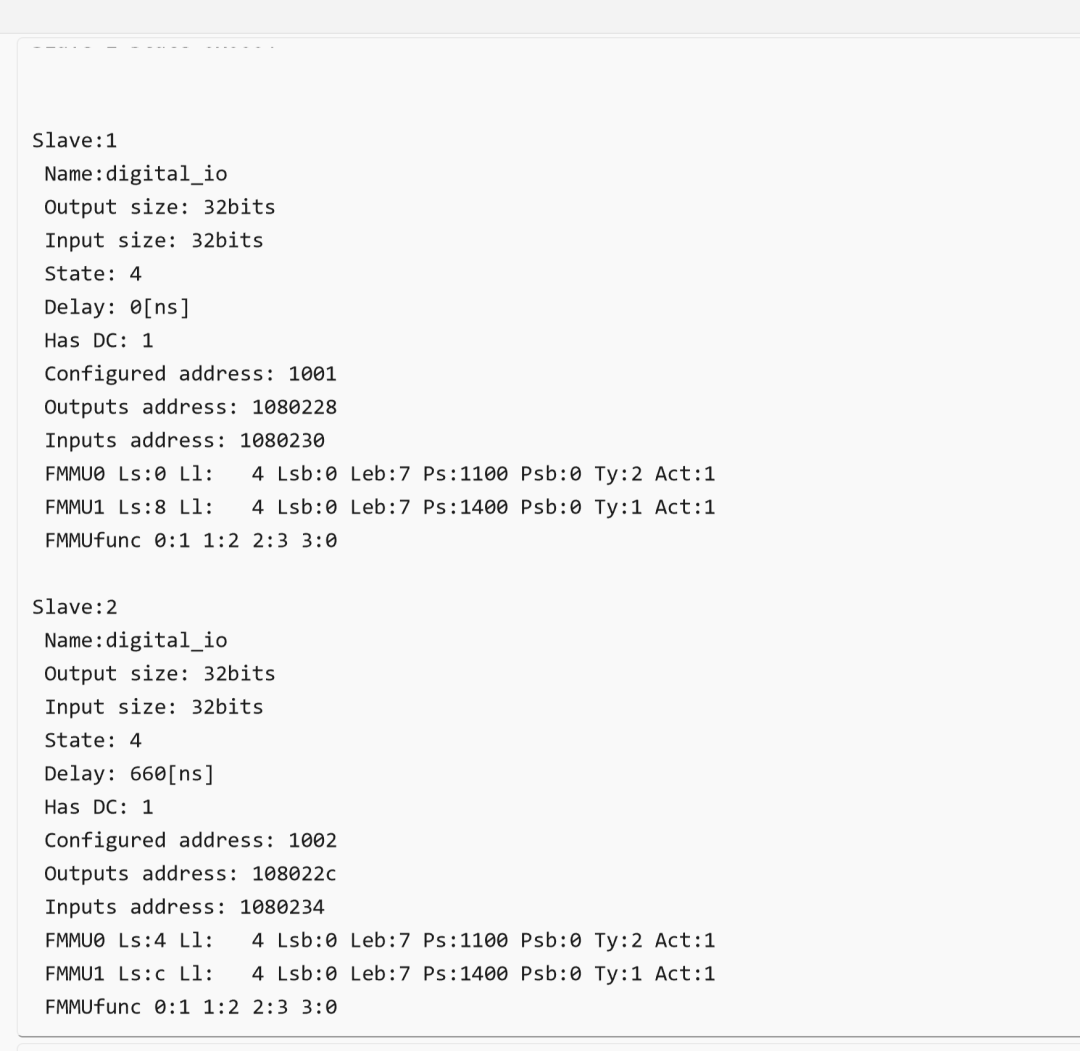
本方案基于支持以太網(wǎng)控制器的 HPM 67/64/63/68/6E 系列 MCU,提供了作為 EtherCAT 主站的通信解決方案。該方案利用開源的 EtherCAT 主站 SOEM 協(xié)議棧,確保高效的通信性能。
HPM 6E00 系列 MCU 支持 ESC 控制器,因此本方案選擇 HPM6E00EVK 作為從站設(shè)備。通過與 HPM6750EVK/HPM6300EVK 等主站設(shè)備的協(xié)作,本方案成功實現(xiàn)了驅(qū)動 IO 點燈的功能。
注意:我們已成功移植并適配開源的 SOEM 協(xié)議棧。由于 SOEM 開源協(xié)議的限制,源代碼將不包含在 SDK 中。請您自行下載源代碼并安裝到指定目錄。
3
I2S DMA CHAIN應(yīng)用方案
HPM6700/6400系列微控制器具備音頻功能,支持四路I2S接口、一路DAO播音功能,以及一路PDM數(shù)字麥克風(fēng)和VAD功能。I2S接口支持時分復(fù)用,最多可實現(xiàn)TDM16。I2S模塊支持四種工作模式:飛利浦標準、MSB對齊模式、LSB對齊模式和DSP模式。
本方案以HPM6750EVK2開發(fā)板為例,介紹I2S的DMA鏈式數(shù)據(jù)收發(fā)功能。接收到的數(shù)據(jù)為麥克風(fēng)采集的信號,經(jīng)過CODEC傳輸至MCU;I2S發(fā)送的數(shù)據(jù)則通過DAO播放,外接揚聲器即可輸出聲音。
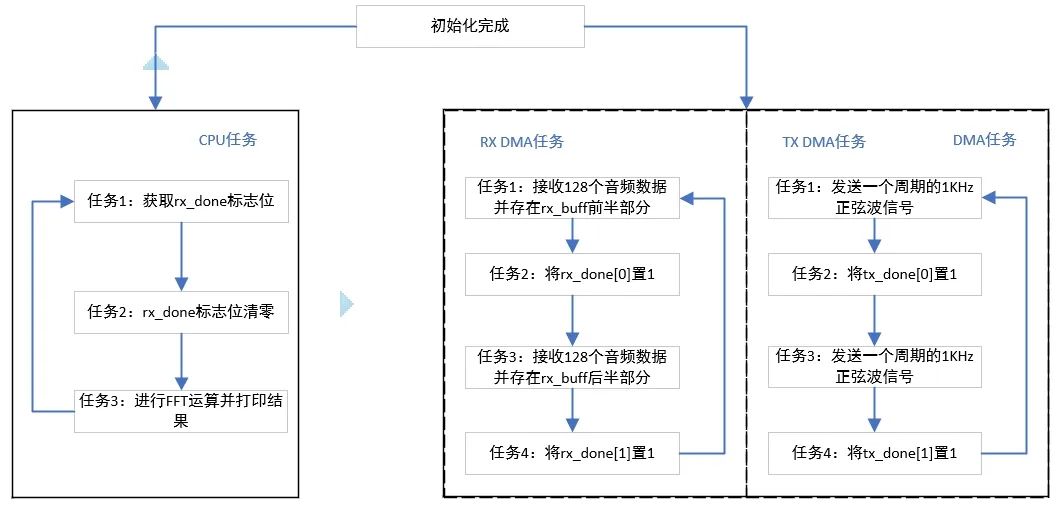
該方案通過使用DMA鏈式傳輸,自動完成I2S接收數(shù)據(jù)到 rx_buff 以及將正弦波信號發(fā)送到DAO,而無需CPU參與。CPU僅負責(zé)處理數(shù)據(jù)。
方案框圖及調(diào)用流程如下:
4
hpm_monitor服務(wù)
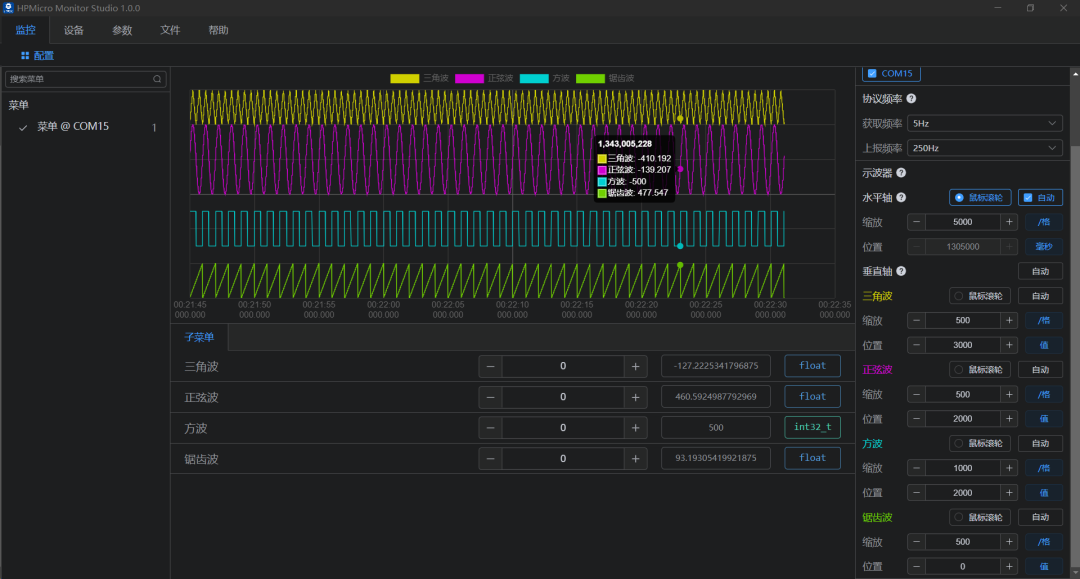
hpm_monitor 是一個高效、易用且具高度可移植性的服務(wù),旨在實時查看和設(shè)置當前設(shè)備中的全局變量,或以高速(1 kHz 至 1 ms)上報全局變量。它常被用作監(jiān)控數(shù)據(jù)示波器,特別適用于電機和電源的調(diào)試。
特點:
高度可移植:只需適配相關(guān)通信端口即可使用。
簡單調(diào)用:僅需調(diào)用兩個接口(init 和 handle 輪詢),對原始工程邏輯無任何修改。
輕量級通信協(xié)議:協(xié)議設(shè)計簡潔,易于擴展。
支持主動獲取和設(shè)置:可以主動獲取(GET)和設(shè)置(SET)全局變量。
高速上報能力:支持快速上報(Notify)全局變量。
注: hpm_monitor服務(wù)需搭配PC上位機HPMicroMonitorStudio工具使用。
運行效果:
5
HPM SPI控制器操作Nor flash應(yīng)用案例
HPM MCU 支持串行外設(shè)總線(SPI)控制器,具備主機模式和從機模式。在主機模式下,可以控制多種外設(shè);在從機模式下,可以接收主機的請求以完成數(shù)據(jù)交換。該控制器支持可配置的時鐘頻率,支持 DMA 數(shù)據(jù)傳輸,并可運行于單線、雙線和四線模式。
應(yīng)用案例包含以下內(nèi)容:
實例展示了如何通過 SPI 接口讀寫 NOR Flash 存儲器,涵蓋單線、雙線和四線模式。
使用的 NOR Flash 存儲器為 W25Q64JVSSIQ。
組件 serial_nor 支持遵循 SFDP 標準的 NOR Flash 存儲器,不限于 W25Q64JVSSIQ。
默認 SPI SCLK 頻率為 50 MHz。
默認 SPI 的 IO 模式為雙線 SPI。
6
HPM子板系列
HPM 系列 MCU 是來自上海先楫半導(dǎo)體科技有限公司的高性能實時 RISC-V 微控制器,為工業(yè)自動化和邊緣計算應(yīng)用提供了強大的算力和高效的控制能力。上海先楫半導(dǎo)體目前已發(fā)布多個系列的高性能微控制器產(chǎn)品,包括 HPM5300、HPM6700/6400、HPM6300、HPM6200 和 HPM6E00 等。
為了幫助用戶更全面地開發(fā)先楫 MCU 的性能,先楫半導(dǎo)體推出了與 HPMEVK 開發(fā)板配套的子板系列。其中部分子板不進行銷售,僅提供硬件設(shè)計資料,包括硬件設(shè)計圖紙、用戶指南以及軟件測試例程。
當前提供的子板包括:HPM6E00EVKSRAMSDRAM 子板。
更新
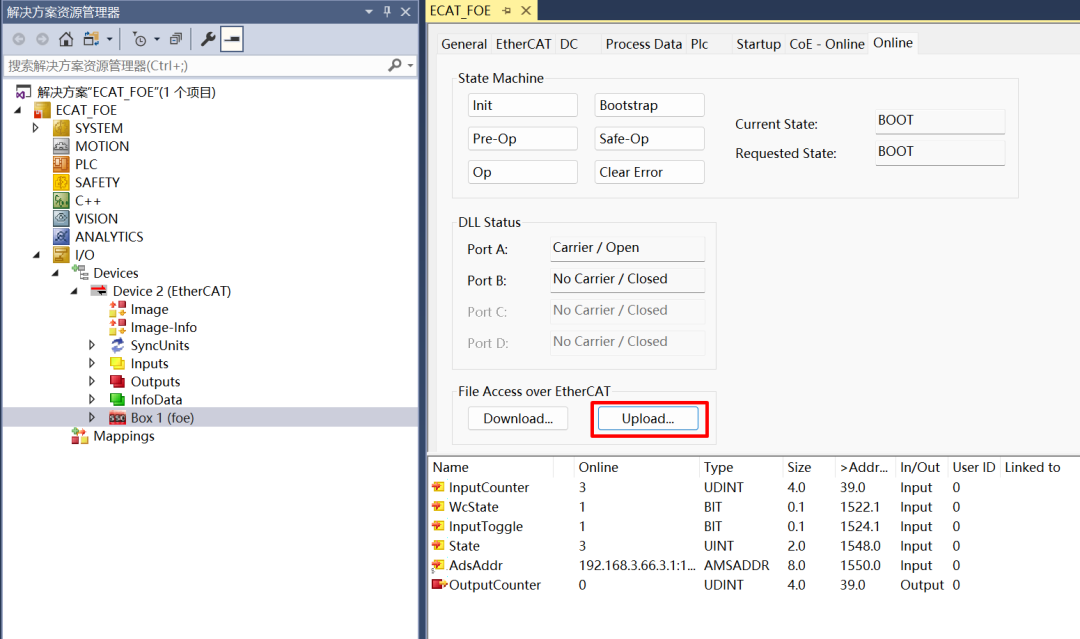
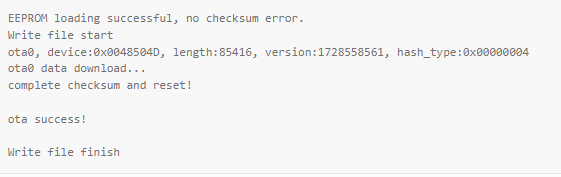
1. HPM二級Boot固件升級方案新增ECAT通道FOE
HPM 二級 Boot 固件升級方案 新增了基于 FOE 協(xié)議的 ECAT 通道升級功能。
2. hpm_motor庫2.0新增慣量辨識算法
hpm_motor是一個專為電機控制核心算法設(shè)計的庫文件,旨在通過持續(xù)更新和模塊化管理具體功能算法,簡化用戶的開發(fā)過程。用戶無需關(guān)注底層實現(xiàn),從而加速程序開發(fā)。
在 hpm_motor Lib 2.0 中,新增了慣量辨識算法。為了實現(xiàn)伺服控制系統(tǒng)的優(yōu)良動靜態(tài)特性,必須識別轉(zhuǎn)動慣量并相應(yīng)調(diào)整系統(tǒng)控制參數(shù)。
完 結(jié)
在使用過程中有任何疑問或者建議,歡迎在github對應(yīng)項目中提交。
問題提交
hpm_apps Issues:
https://github.com/hpmicro/hpm_apps/issues
https://gitee.com/hpmicro/hpm_apps/issues
-
主機
+關(guān)注
關(guān)注
0文章
1038瀏覽量
35998 -
HPM
+關(guān)注
關(guān)注
1文章
43瀏覽量
8015 -
先楫半導(dǎo)體
+關(guān)注
關(guān)注
11文章
250瀏覽量
2684
發(fā)布評論請先 登錄
先楫半導(dǎo)體HPM6E8Y:先楫實時控制芯片驅(qū)動的機器人關(guān)節(jié)“芯”時代

重磅更新 | 先楫半導(dǎo)體HPM_APPS v1.9.0發(fā)布

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖
600MHz RISC-V 雙核加持!先楫HPM6P00重新定義國產(chǎn)高性能混合信號MCU
先楫半導(dǎo)體HPM6E8Y榮獲芯片創(chuàng)新獎,彰顯卓越產(chǎn)品力!
hpm_apps v1.8.0上線:HPM6200四軸伺服驅(qū)控方案重磅發(fā)布!
先楫半導(dǎo)體HPM_SDK v1.7.0發(fā)布!這些更新你值得關(guān)注!
先楫半導(dǎo)體發(fā)布高性能HPM6E8Y系列MCU
先楫半導(dǎo)體HPM OBOX 離線燒錄器正式發(fā)布
CES 2025:先楫半導(dǎo)體發(fā)布高性能機器人MCU
先楫HPM6E00技術(shù)日 | 百人研討共話工業(yè)應(yīng)用創(chuàng)新及發(fā)展趨勢
戰(zhàn)略合作丨華秋商城攜手先楫半導(dǎo)體,共創(chuàng)新篇






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論