") 人形機(jī)器人技術(shù)突破與先楫半導(dǎo)體HPM6E00系列高性能MCU芯片的適配性
人形機(jī)器人技術(shù)突破與先楫半導(dǎo)體HPM6E00系列高性能MCU芯片的適配性

1
前言
人形機(jī)器人,作為人工智能和自動(dòng)化領(lǐng)域的尖端技術(shù),承載著許多復(fù)雜的工程挑戰(zhàn)。要實(shí)現(xiàn)其自主移動(dòng)、動(dòng)態(tài)平衡、智能感知等功能,需要融合高級(jí)控制算法、傳感器集成、實(shí)時(shí)反饋與調(diào)整以及人工智能等技術(shù)。而作為實(shí)現(xiàn)這些目標(biāo)的關(guān)鍵,主控芯片的選擇起著至關(guān)重要的作用。本文我們將探討人形機(jī)器人面臨的技術(shù)難點(diǎn),以及為什么先楫半導(dǎo)體 HPM6E00系列芯片因其體積小、性能強(qiáng)大、豐富的外設(shè)功能而成為該領(lǐng)域的理想選擇。
2
人形機(jī)器人核心技術(shù)難點(diǎn)
1. 動(dòng)態(tài)平衡與高級(jí)控制算法
人形機(jī)器人的動(dòng)態(tài)平衡是其能否實(shí)現(xiàn)穩(wěn)定行走、站立、甚至跑步和跳躍的核心技術(shù)。為了保持平衡,機(jī)器人必須實(shí)時(shí)采集自身和環(huán)境的各種數(shù)據(jù),并通過(guò)動(dòng)態(tài)平衡算法(如逆運(yùn)動(dòng)學(xué)、狀態(tài)反饋控制等)調(diào)整各關(guān)節(jié)的動(dòng)作。機(jī)器人在不同環(huán)境中行走時(shí),其重心會(huì)隨時(shí)變化,如何讓機(jī)器人在不倒下的同時(shí)完成復(fù)雜動(dòng)作是一個(gè)極為困難的任務(wù)。這涉及到多軸運(yùn)動(dòng)控制以及復(fù)雜的力學(xué)計(jì)算,通常需要使用模糊控制、PID控制等方法進(jìn)行動(dòng)態(tài)實(shí)時(shí)調(diào)整。控制系統(tǒng)的實(shí)時(shí)性要求極高,每毫秒內(nèi)都需要快速處理數(shù)據(jù)并做出調(diào)整。
2. 傳感器集成與實(shí)時(shí)反饋
為了實(shí)現(xiàn)精準(zhǔn)控制,人形機(jī)器人需要集成大量的傳感器,包括慣性測(cè)量單元(IMU)、力傳感器、位置傳感器、加速度計(jì)和陀螺儀等。這些傳感器的數(shù)據(jù)需要快速傳輸?shù)街骺匦酒⒂尚酒ㄟ^(guò)高級(jí)算法進(jìn)行計(jì)算和處理。
實(shí)時(shí)反饋和調(diào)整是人形機(jī)器人精確動(dòng)作控制的關(guān)鍵。傳感器采集的數(shù)據(jù)需以毫秒級(jí)的速度傳輸至主控芯片,隨后主控芯片對(duì)各個(gè)關(guān)節(jié)電機(jī)發(fā)出調(diào)整指令,確保機(jī)器人的動(dòng)作與外部環(huán)境變化保持同步。
3. 人工智能與機(jī)器學(xué)習(xí)
為了讓機(jī)器人在復(fù)雜環(huán)境中具備自主學(xué)習(xí)能力,人工智能(AI)和機(jī)器學(xué)習(xí)(ML)算法被廣泛應(yīng)用。通過(guò)深度學(xué)習(xí)和強(qiáng)化學(xué)習(xí),機(jī)器人可以根據(jù)環(huán)境變化自我調(diào)整并優(yōu)化行為。這些算法需要芯片具備強(qiáng)大的計(jì)算能力,以在極短時(shí)間內(nèi)處理大量數(shù)據(jù)并做出智能決策。例如,通過(guò)視覺(jué)識(shí)別和行為預(yù)測(cè),機(jī)器人可以避開(kāi)障礙物或與人類進(jìn)行交互,提升其在復(fù)雜場(chǎng)景中的適應(yīng)性和穩(wěn)定性。
3
先楫半導(dǎo)體 HPM6E00 系列芯片的應(yīng)用優(yōu)勢(shì)
面對(duì)人形機(jī)器人技術(shù)中的諸多挑戰(zhàn),選擇一款高性能且功能齊全的主控芯片尤為重要。上海先楫半導(dǎo)體的 HPM6E00 系列芯片憑借其小巧的體積、強(qiáng)大的計(jì)算能力和豐富的外設(shè)支持,為解決這些難點(diǎn)提供了卓越的解決方案。
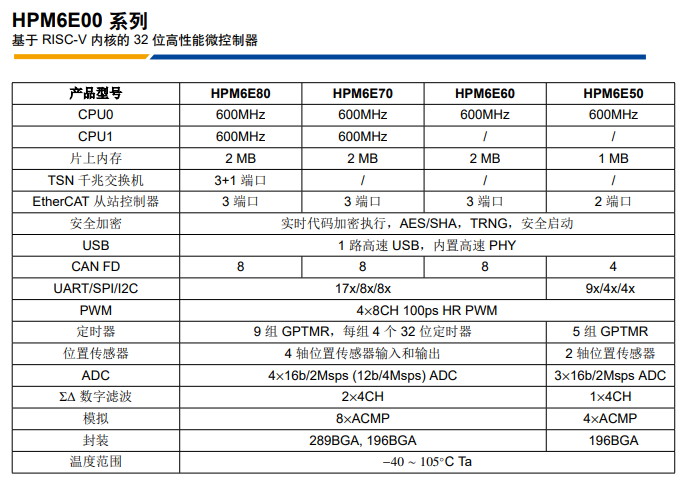
1. 體積小,BGA封裝
HPM6E00 系列芯片采用BGA封裝,使其體積小巧、便于集成。人形機(jī)器人對(duì)硬件體積有嚴(yán)格要求,尤其是為了保持平衡和移動(dòng)靈活性,系統(tǒng)需要在有限的空間內(nèi)搭載盡可能多的傳感器和功能模塊。BGA封裝不僅節(jié)省了空間,還具有良好的散熱性能,有助于確保芯片在高強(qiáng)度運(yùn)算中保持穩(wěn)定。

2. 豐富的性能支持高級(jí)控制算法
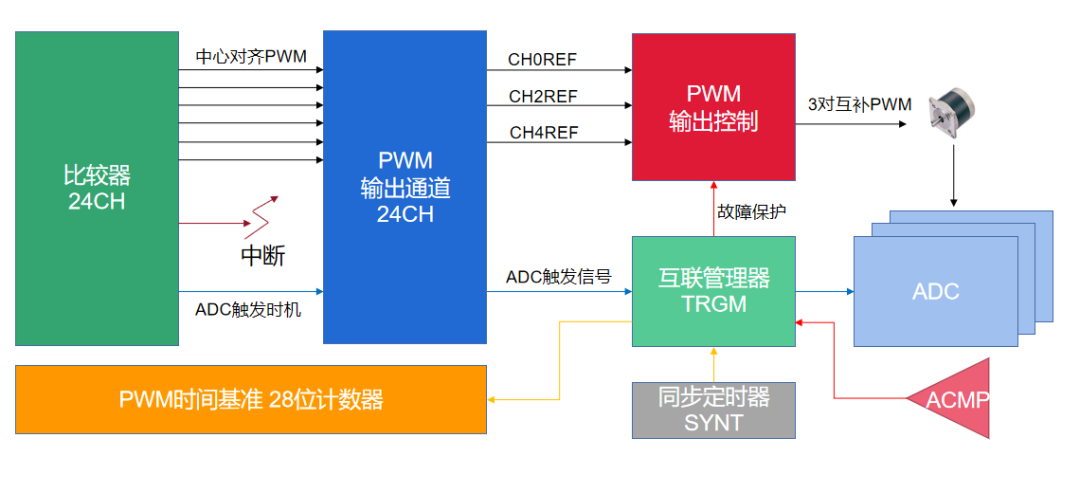
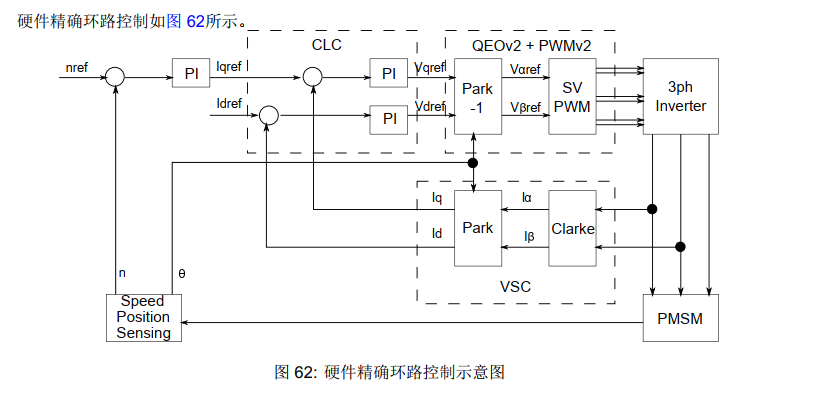
HPM6E00 系列芯片內(nèi)置高性能多核處理器,支持實(shí)時(shí)處理復(fù)雜的運(yùn)動(dòng)控制算法。芯片內(nèi)的PWM(脈寬調(diào)制)與硬件電流環(huán)控制功能,尤其適用于電機(jī)驅(qū)動(dòng)與控制,可以實(shí)現(xiàn)機(jī)器人關(guān)節(jié)電機(jī)的精確調(diào)節(jié)。結(jié)合ADC(模數(shù)轉(zhuǎn)換器),HPM6E00 能夠高效采集電機(jī)和傳感器的反饋數(shù)據(jù),并通過(guò)硬件電流環(huán)實(shí)現(xiàn)快速閉環(huán)控制。這種高效的實(shí)時(shí)控制系統(tǒng)能夠迅速響應(yīng)機(jī)器人每個(gè)關(guān)節(jié)的狀態(tài)變化,確保其在行走、站立、轉(zhuǎn)彎等過(guò)程中保持穩(wěn)定。
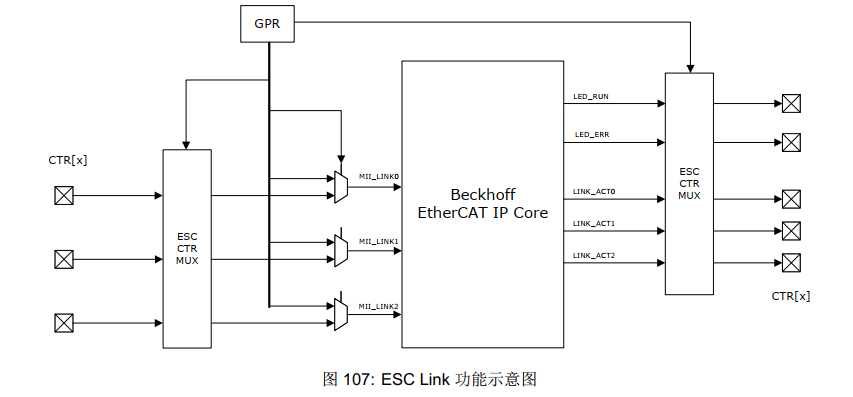
3. EtherCAT 接口與 TSN(時(shí)間敏感網(wǎng)絡(luò))支持
HPM6E00 系列集成了EtherCAT接口,它是一種工業(yè)級(jí)實(shí)時(shí)通信協(xié)議,廣泛應(yīng)用于機(jī)器人和自動(dòng)化控制中。EtherCAT 提供極低的延遲和高帶寬,使機(jī)器人能夠在毫秒級(jí)傳輸傳感器數(shù)據(jù)和控制指令,確保動(dòng)作控制的準(zhǔn)確性和同步性。同時(shí),HPM6E00 支持TSN(時(shí)間敏感網(wǎng)絡(luò)),可以為機(jī)器人內(nèi)的多種傳感器提供精確的時(shí)間同步。在動(dòng)態(tài)平衡控制中,各傳感器的數(shù)據(jù)需要實(shí)時(shí)同步處理,TSN 能夠保證多傳感器數(shù)據(jù)的無(wú)縫融合,避免因數(shù)據(jù)不同步而導(dǎo)致的控制誤差。
4. 多路 CANFD 接口
為了滿足機(jī)器人復(fù)雜模塊之間的通信需求,HPM6E00 系列提供了多路 CANFD 接口,這是一種高速、抗干擾能力強(qiáng)的通信協(xié)議。CANFD 支持更高的帶寬和數(shù)據(jù)幀,可以快速、穩(wěn)定地傳輸關(guān)節(jié)控制器、傳感器和執(zhí)行器之間的數(shù)據(jù)。在人形機(jī)器人中,關(guān)節(jié)電機(jī)、傳感器和主控單元之間的數(shù)據(jù)交換至關(guān)重要,CANFD 接口能夠確保這些模塊間的通信可靠性和實(shí)時(shí)性。
5. 硬件電流環(huán)與編碼器數(shù)據(jù)處理
HPM6E00 系列芯片包含:4 個(gè) 8 通道增強(qiáng)型 PWM 控制器,PWM 調(diào)制精度高達(dá)100ps;多種運(yùn)動(dòng)傳感器接口,包括增量式和絕對(duì)值位置傳感器接口,旋轉(zhuǎn)變壓器解碼接口和磁編碼器接口;脈沖式位置輸出接口和絕對(duì)值位置輸出接口;包括運(yùn)動(dòng)控制單元,空間矢量變換和閉環(huán)控制器在內(nèi)的硬件運(yùn)動(dòng)控制環(huán)路。內(nèi)置的硬件電流環(huán)功能,可以極大提高電機(jī)控制的精度和響應(yīng)速度。在人形機(jī)器人中,精確控制電機(jī)是確保關(guān)節(jié)靈活性和動(dòng)作準(zhǔn)確性的基礎(chǔ)。通過(guò)與編碼器的集成,HPM6E00 可以實(shí)現(xiàn)對(duì)關(guān)節(jié)位置、速度的高精度監(jiān)測(cè)。
4
總結(jié)
人形機(jī)器人技術(shù)的不斷發(fā)展依賴于先進(jìn)的控制算法、傳感器集成、動(dòng)態(tài)平衡與實(shí)時(shí)反饋等技術(shù)的突破。而上海先楫半導(dǎo)體 HPM6E00 系列芯片憑借其小巧的設(shè)計(jì)、豐富的外設(shè)功能、高性能處理能力和強(qiáng)大的實(shí)時(shí)通信能力,為人形機(jī)器人行業(yè)提供了理想的技術(shù)支持。通過(guò)集成 PWM 控制、硬件電流環(huán)、EtherCAT、TSN 和多路 CANFD 接口,HPM6E00 系列芯片不僅滿足了機(jī)器人對(duì)精確控制和快速響應(yīng)的需求,還在復(fù)雜的實(shí)時(shí)反饋系統(tǒng)中展現(xiàn)出卓越的穩(wěn)定性和性能優(yōu)勢(shì)。它無(wú)疑將為未來(lái)人形機(jī)器人技術(shù)的發(fā)展注入強(qiáng)大動(dòng)力。
-
人形機(jī)器人
+關(guān)注
關(guān)注
7文章
712瀏覽量
17557 -
MCU芯片
+關(guān)注
關(guān)注
3文章
256瀏覽量
12042 -
先楫半導(dǎo)體
+關(guān)注
關(guān)注
10文章
250瀏覽量
2633
發(fā)布評(píng)論請(qǐng)先 登錄
【強(qiáng)勢(shì)上新】HPM5E00:EtherCAT運(yùn)動(dòng)控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖

有獎(jiǎng)提問(wèn)!先楫半導(dǎo)體HPM6E00系列新品發(fā)布會(huì)!!
先楫HPM6E00技術(shù)日 | 百人研討共話工業(yè)應(yīng)用創(chuàng)新及發(fā)展趨勢(shì)
先楫半導(dǎo)體HPM6700系列正式合入OpenHarmony社區(qū)主干
高朋滿座,聚勢(shì)工業(yè)以太網(wǎng)——EtherCAT技術(shù)應(yīng)用峰會(huì)暨先楫半導(dǎo)體HPM6E00新品預(yù)覽

先楫半導(dǎo)體HPM6E00芯片成功點(diǎn)亮并順利完成第一階段驗(yàn)證
工業(yè)芯標(biāo)桿,邀您來(lái)圍觀——先楫HPM6E00新品上市在即
先楫HPM6E00新品上市在即
國(guó)內(nèi)首款內(nèi)嵌ESC的高性能微控制器,先楫半導(dǎo)體HPM6E00全面上市
先楫半導(dǎo)體高性能微控制器HPM6E00系列全面上市
支持HPM6E00!HPMicro Pintool Web v0.3.1正式上線!

CES 2025:先楫半導(dǎo)體發(fā)布高性能機(jī)器人MCU
先楫半導(dǎo)體發(fā)布高性能HPM6E8Y系列MCU
【強(qiáng)勢(shì)上新】HPM5E00:EtherCAT運(yùn)動(dòng)控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖
先楫半導(dǎo)體HPM6E8Y:先楫實(shí)時(shí)控制芯片驅(qū)動(dòng)的機(jī)器人關(guān)節(jié)“芯”時(shí)代






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論