") 磁致伸縮位移傳感器在機(jī)械臂與機(jī)器人中應(yīng)用
磁致伸縮位移傳感器在機(jī)械臂與機(jī)器人中應(yīng)用
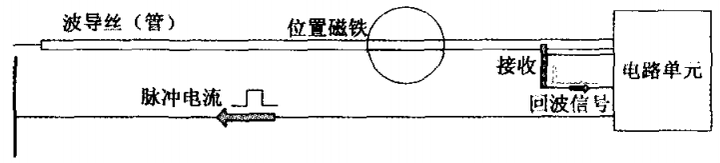
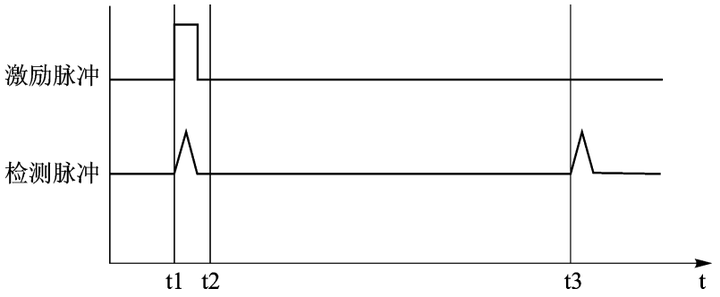
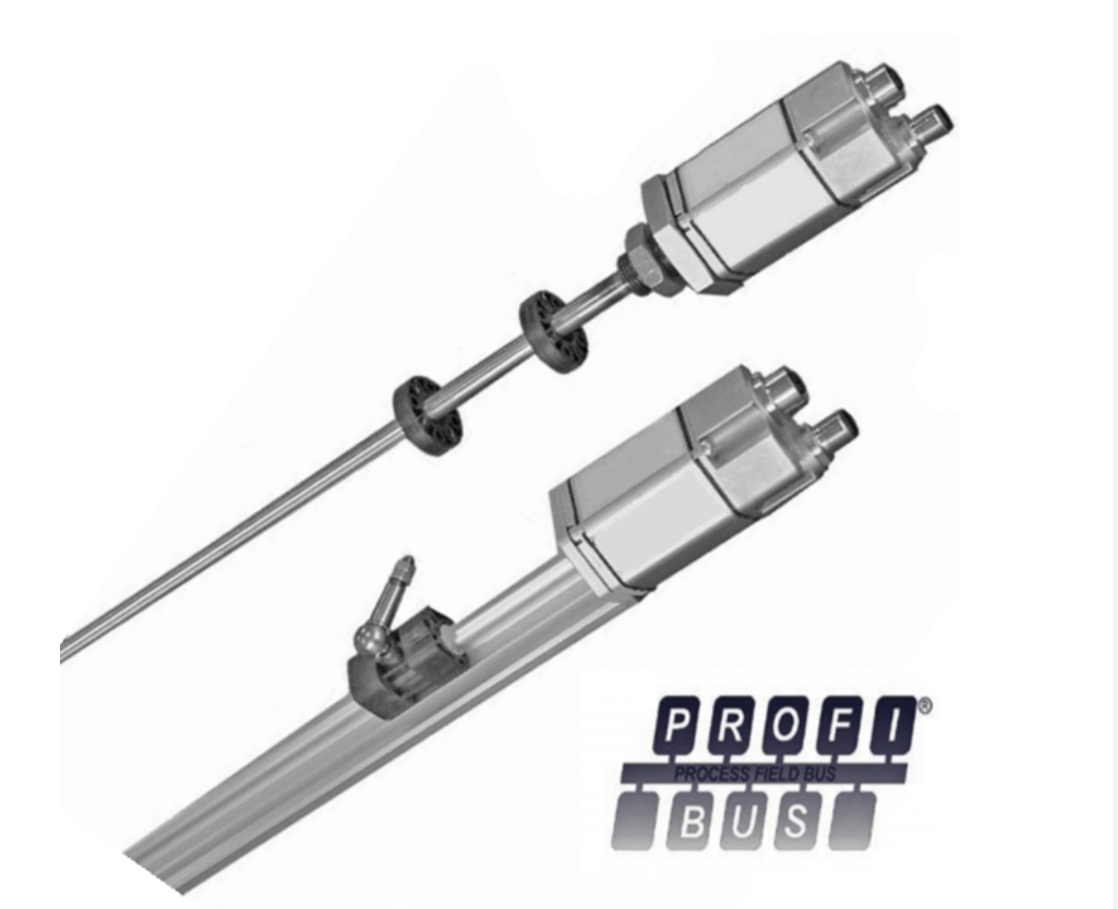
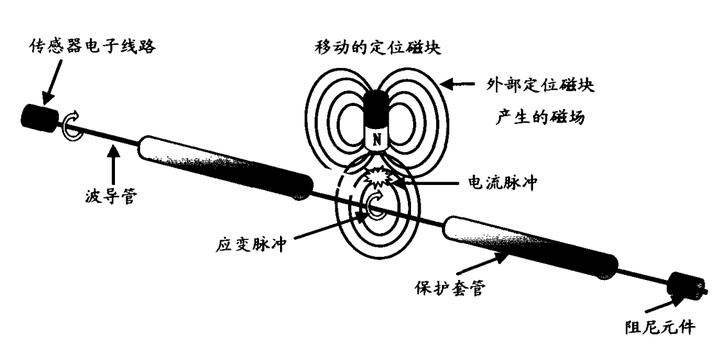
磁致伸縮位移傳感器是一種基于磁致伸縮效應(yīng)的高精度位移測量裝置,具有非接觸式、高分辨率、長壽命和強(qiáng)抗干擾能力等特點(diǎn)。在機(jī)械臂與機(jī)器人領(lǐng)域,其應(yīng)用正逐漸成為提升系統(tǒng)性能的關(guān)鍵技術(shù)之一。以下是其具體應(yīng)用場景及優(yōu)勢分析:
1. 機(jī)械臂高精度定位與反饋控制
關(guān)節(jié)位置檢測
磁致伸縮傳感器可集成于機(jī)械臂的旋轉(zhuǎn)或直線關(guān)節(jié)中,實(shí)時(shí)測量執(zhí)行器(如液壓缸、伺服電機(jī))的位移或角度變化,精度可達(dá)微米級(jí),確保機(jī)械臂末端執(zhí)行器的精準(zhǔn)定位。
閉環(huán)控制優(yōu)化
通過實(shí)時(shí)反饋位移數(shù)據(jù),結(jié)合控制系統(tǒng)(如PID算法),可動(dòng)態(tài)補(bǔ)償機(jī)械臂運(yùn)動(dòng)中的振動(dòng)、溫度漂移或負(fù)載變化,提升軌跡跟蹤精度和重復(fù)定位性能(重復(fù)精度可達(dá)±0.01%)。
2. 多自由度運(yùn)動(dòng)監(jiān)測
復(fù)合運(yùn)動(dòng)解耦
在具有多個(gè)自由度的協(xié)作機(jī)器人(如6軸機(jī)械臂)中,磁致伸縮傳感器可同步監(jiān)測多個(gè)關(guān)節(jié)的位移和速度,幫助解耦復(fù)雜運(yùn)動(dòng),優(yōu)化逆運(yùn)動(dòng)學(xué)計(jì)算的實(shí)時(shí)性。
柔性關(guān)節(jié)監(jiān)測
適用于柔性驅(qū)動(dòng)(如氣動(dòng)人工肌肉、彈性關(guān)節(jié))的機(jī)器人,通過測量微小形變實(shí)現(xiàn)力-位移混合控制,增強(qiáng)對軟性交互任務(wù)的適應(yīng)性。
3. 動(dòng)態(tài)力與碰撞檢測
安全觸覺反饋
在協(xié)作機(jī)器人中,傳感器可通過檢測微小位移變化間接計(jì)算接觸力(結(jié)合胡克定律),實(shí)現(xiàn)碰撞檢測和緊急停機(jī),保障人機(jī)協(xié)作安全性。
力控打磨/裝配
例如在精密裝配或曲面打磨場景中,通過位移-力耦合反饋,機(jī)器人可動(dòng)態(tài)調(diào)整施力大小,避免工件損傷。
4. 惡劣環(huán)境適應(yīng)性
抗污染與抗干擾
磁致伸縮傳感器采用全封閉結(jié)構(gòu),無機(jī)械接觸,可在高濕度、油污、粉塵或強(qiáng)電磁干擾(如焊接機(jī)器人場景)環(huán)境中穩(wěn)定工作,壽命長達(dá)數(shù)千萬次循環(huán)。
極端溫度穩(wěn)定性
部分型號(hào)支持-40°C至150°C寬溫域,適用于航空航天或極地科考機(jī)器人。
5. 輕量化與集成化設(shè)計(jì)
緊湊型結(jié)構(gòu)
傳感器體積小、重量輕,適合集成于小型化機(jī)械臂或微型手術(shù)機(jī)器人(如達(dá)芬奇手術(shù)系統(tǒng))。
多參數(shù)同步輸出
部分傳感器可同時(shí)輸出位移、速度、溫度數(shù)據(jù),簡化機(jī)器人系統(tǒng)布線復(fù)雜度。
6. 維護(hù)與壽命優(yōu)勢
免維護(hù)設(shè)計(jì)
相比光電編碼器或電位器,無磨損部件,長期使用無需校準(zhǔn),降低機(jī)器人系統(tǒng)的停機(jī)維護(hù)成本。
長壽命保障
在工業(yè)機(jī)器人(如汽車焊接線)中,磁致伸縮傳感器可連續(xù)工作數(shù)十年,顯著提升產(chǎn)線可靠性。
典型應(yīng)用案例
工業(yè)機(jī)器人
汽車制造:焊接機(jī)械臂的焊槍位置閉環(huán)控制。
半導(dǎo)體封裝:晶圓搬運(yùn)機(jī)械臂的納米級(jí)定位。
醫(yī)療機(jī)器人
手術(shù)機(jī)器人:實(shí)時(shí)反饋器械末端位移,確保微創(chuàng)操作的精準(zhǔn)性。
特種機(jī)器人
深海作業(yè)機(jī)械臂:耐高壓腐蝕環(huán)境下的抓取動(dòng)作監(jiān)測。
核電站維護(hù)機(jī)器人:輻射環(huán)境中的遠(yuǎn)程操控定位。
未來趨勢
智能化融合
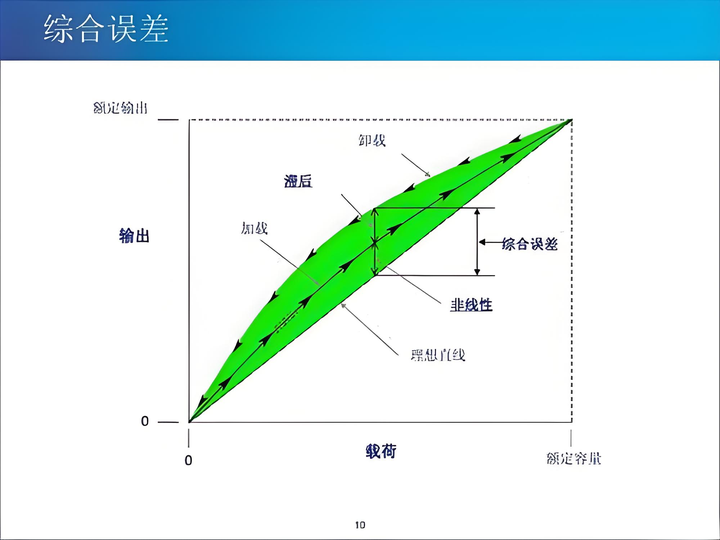
結(jié)合AI算法(如深度學(xué)習(xí)補(bǔ)償非線性誤差)和物聯(lián)網(wǎng)(IoT),實(shí)現(xiàn)傳感器數(shù)據(jù)的云端分析與預(yù)測性維護(hù)。
柔性電子集成
開發(fā)柔性磁致伸縮材料,推動(dòng)可穿戴外骨骼或軟體機(jī)器人的力-位移感知技術(shù)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29533瀏覽量
211727 -
位移傳感器
+關(guān)注
關(guān)注
5文章
1152瀏覽量
35017 -
測量裝置
+關(guān)注
關(guān)注
0文章
32瀏覽量
13200
發(fā)布評(píng)論請先 登錄

STM32的磁致伸縮智能位移傳感器研究
磁致伸縮位移傳感器誤差分析
磁致伸縮位移傳感器在水輪機(jī)中應(yīng)用
FPGA在磁致伸縮位移傳感器中的應(yīng)用
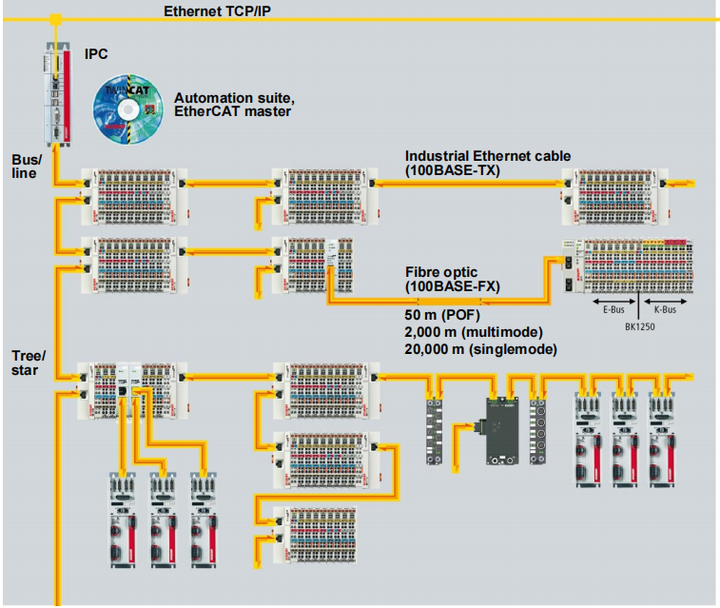
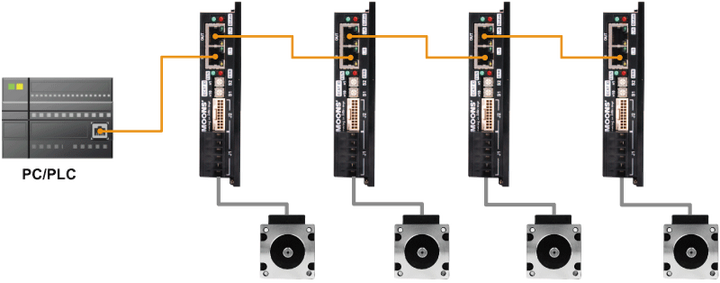
EtherCAT在磁致伸縮位移傳感器中的應(yīng)用
現(xiàn)場總線磁致伸縮位移傳感器








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論