") 手把手教你寫單片機定時器中斷程序
手把手教你寫單片機定時器中斷程序

我們在學(xué)單片機時我們第一個例程就是燈的閃爍,那是用延時程序做的,現(xiàn)在回想起來,這樣做不很恰當(dāng),為什么呢?我們的主程序做了燈的閃爍,就不能再干其它的事了,難道單片機只能這樣工作嗎?當(dāng)然不是,我們能用定時器來實現(xiàn)燈的閃爍的功能。
例1:查詢方式
ORG 0000H
AJMP START
ORG 30H
START:
MOV P1,#0FFH ;關(guān)所 燈
MOV TMOD,#00000001B ;定時/計數(shù)器0工作于方式1
MOV TH0,#15H
MOV TL0,#0A0H ;即數(shù)5536
SETB TR0 ;定時/計數(shù)器0開始運行
LOOP:JBC TF0,NEXT ;如果TF0等于1,則清TF0并轉(zhuǎn)NEXT處
AJMP LOOP ;不然跳轉(zhuǎn)到LOOP處運行
NEXT:CPL P1.0
MOV TH0,#15H
MOV TL0,#9FH;重置定時/計數(shù)器的初值
AJMP LOOP
END AJMP LOOP
END
鍵入程序,看到了什么?燈在閃爍了,這可是用定時器做的,不再是主程序的循環(huán)了。簡單地分析一下程序,為什么用JBC呢?TF0是定時/計數(shù)器0的溢出標(biāo)記位,當(dāng)定時器產(chǎn)生溢出后,該位由0變1,所以查詢該位
就可知宇時時間是否已到。該位為1后,要用軟件將標(biāo)記位清0,以便下一次定時是間到時該位由0變1,所以用了JBC指令,該指位在判1轉(zhuǎn)移的同時,還將該位清0。
以上程序是能實現(xiàn)燈的閃爍了,可是主程序除了讓燈閃爍外,還是不能做其他的事啊!不,不對,我們能在LOOP:……和AJMP LOOP指令之間插入一些指令來做其他的事情,只要保證執(zhí)行這些指令的時間少于定時時間就行了。那我們在用軟件延時程序的時候不是也能用一些指令來替代DJNZ嗎?是的,但是那就要求你精確計算所用指令的時間,然后再減去對應(yīng)的DJNZ循環(huán)次數(shù),很不方便,而現(xiàn)在只要求所用指令的時間少于定時時間就行,顯然要求低了。當(dāng)然,這樣的辦法還是不好,所以我們常用以下的辦法來實現(xiàn)。
程序2:用中斷實現(xiàn)
ORG 0000H,
AJMP START
ORG 000BH ;定時器0的中斷向量地址
AJMP TIME0 ;跳轉(zhuǎn)到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關(guān)所 燈
MOV TMOD,#00000001B ;定時/計數(shù)器0工作于方式1
MOV TH0,#15H
MOV TL0,#0A0H ;即數(shù)5536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數(shù)器0允許
SETB TR0 ;定時/計數(shù)器0開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器0的中斷處理程序
PUSH ACC
PUSH PSW ;將PSW和ACC推入堆棧保護
CPL P1.0
MOV TH0,#15H
MOV TL0,#0A0H ;重置定時常數(shù)
POP PSW
POP ACC
RETI
END
上面的例程中,定時時間一到,TF0由0變1,就會引發(fā)中斷,CPU將自動轉(zhuǎn)至000B處尋找程序并執(zhí)行,由于留給定時器中斷的空間只有8個字節(jié),顯然不足以寫下所有有中斷處理程序,所以在000B處安排一條跳轉(zhuǎn)指令,轉(zhuǎn)到實際處理中斷的程序處,這樣,中斷程序能寫在任意地方,也能寫任意長度了。進(jìn)入定時中斷后,首先要保存當(dāng)前的一些狀態(tài),程序中只演示了保存存ACC和PSW,實際工作中應(yīng)該根據(jù)需要將可能會改變的單元的值都推入堆棧進(jìn)行保護(本程序中實際不需保存護任何值,這里只作個演示)。
上面的兩個單片機程序運行后,我們發(fā)現(xiàn)燈的閃爍非常快,根本分辨不出來,只是視覺上感到燈有些晃動而已,為什么呢?我們能計算一下,定時器中預(yù)置的數(shù)是5536,所以每計60000個脈沖就是定時時間到,這60000個脈沖的時間是多少呢?我們的晶體震蕩器是12M,所以就是60000微秒,即60毫秒,因此速度是非常快的。如果我想實現(xiàn)一個1S的定時,該怎么辦呢?下面給出一個例程。
ORG 0000H
AJMP START
ORG 000BH ;定時器0的中斷向量地址
AJMP TIME0 ;跳轉(zhuǎn)到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關(guān)所 燈
MOV 30H,#00H ;軟件計數(shù)器預(yù)清0
MOV TMOD,#00000001B ;定時/計數(shù)器0工作于方式1
MOV TH0,#3CH
MOV TL0,#0B0H ;即數(shù)15536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數(shù)器0允許
SETB TR0 ;定時/計數(shù)器0開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器0的中斷處理程序
PUSH ACC
PUSH PSW ;將PSW和ACC推入堆棧保護
INC 30H
MOV A,30H
CJNE A,#20,T_RET ;30H單元中的值到了20了嗎?
T_L1: CPL P1.0 ;到了,取反P10
MOV 30H,#0 ;清軟件計數(shù)器
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置定時常數(shù)
POP PSW
POP ACC
RETI
END
先自己分析一下,看看是怎么實現(xiàn)的?這里采用了軟件計數(shù)器的概念,思路是這樣的,先用定時/計數(shù)器0做一個50毫秒的定時器,定時是間到了以后并不是立即取反P10,而是將軟件計數(shù)器中的值加1,如果軟件計數(shù)器計到了20,就取反P10,并清掉軟件計數(shù)器中的值,不然直接返回,這樣,就變成了20次定時中斷才取反一次P10,因此定時時間就延長了成了20*50即1000毫秒了。
這個思路在工程中是非常有用的,有的時候我們需要若干個定時器,可51中總共才有2個,怎么辦呢?其實,只要這幾個定時的時間有一定的公約數(shù),我們就能用軟件定時器加以實現(xiàn),如我要實現(xiàn)P10口所接燈按1S每次,而P11口所接燈按2S每次閃爍,怎么實現(xiàn)呢?對了我們用兩個計數(shù)器,一個在它計到20時,取反P10,并清零,就如上面所示,另一個計到40取反P11,然后清0,不就行了嗎?這部份的程序如下
ORG 0000H
AJMP START
ORG 000BH ;定時器0的中斷向量地址
AJMP TIME0 ;跳轉(zhuǎn)到真正的定時器程序處
ORG 30H
START:
MOV P1,#0FFH ;關(guān)所 燈
MOV 30H,#00H ;軟件計數(shù)器預(yù)清0
MOV TMOD,#00000001B ;定時/計數(shù)器0工作于方式1
MOV TH0,#3CH
MOV TL0,#0B0H ;即數(shù)15536
SETB EA ;開總中斷允許
SETB ET0 ;開定時/計數(shù)器0允許
SETB TR0 ;定時/計數(shù)器0開始運行
LOOP: AJMP LOOP ;真正工作時,這里可寫任意程序
TIME0: ;定時器0的中斷處理程序
PUSH ACC
PUSH PSW ;將PSW和ACC推入堆棧保護
INC 30H
INC 31H ;兩個計數(shù)器都加1
MOV A,30H
CJNE A,#20,T_NEXT ;30H單元中的值到了20了嗎?
T_L1: CPL P1.0 ;到了,取反P10
MOV 30H,#0 ;清軟件計數(shù)器
T_NEXT:
MOV A,31H
CJNE A,#40,T_RET ;31h單元中的值到40了嗎?
T_L2:
CPL P1.1
MOV 31H,#0 ;到了,取反P11,清計數(shù)器,返回
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置定時常數(shù)
POP PSW
POP ACC
RETI
END
-
單片機
+關(guān)注
關(guān)注
6067文章
44982瀏覽量
650282 -
中斷
+關(guān)注
關(guān)注
5文章
905瀏覽量
42781 -
定時器
+關(guān)注
關(guān)注
23文章
3298瀏覽量
118851
原文標(biāo)題:手把手教你使用單片機定時器、中斷試驗
文章出處:【微信號:gh_bee81f890fc1,微信公眾號:面包板社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【教程】零基礎(chǔ)!手把手教你使用STM32F4進(jìn)行E22-400T22S編程通信

手把手教你如何調(diào)優(yōu)Linux網(wǎng)絡(luò)參數(shù)
正點原子Linux系列全新視頻教程來啦!手把手教你MP257開發(fā)板,讓您輕松入門!
GPU顯卡維修避坑指南:手把手教你識別行業(yè)套路!

《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》
《手把手教你做星閃無人機—KaihongOS星閃無人機開發(fā)實戰(zhàn)》系列課程課件匯總
《手把手教你做PC-KaihongOS筆記本電腦開發(fā)實戰(zhàn)》課件匯總
【第四章 定時任務(wù)】手把手教你玩轉(zhuǎn)新版正點原子云
《手把手教你做星閃無人機》即將開播,鎖定15日晚七點!

《手把手教你做PC》課程即將啟動!深開鴻引領(lǐng)探索KaihongOS筆記本電腦開發(fā)實戰(zhàn)
Air780E模組LuatOS開發(fā)實戰(zhàn) —— 手把手教你搞定數(shù)據(jù)打包解包

單片機的中斷機制
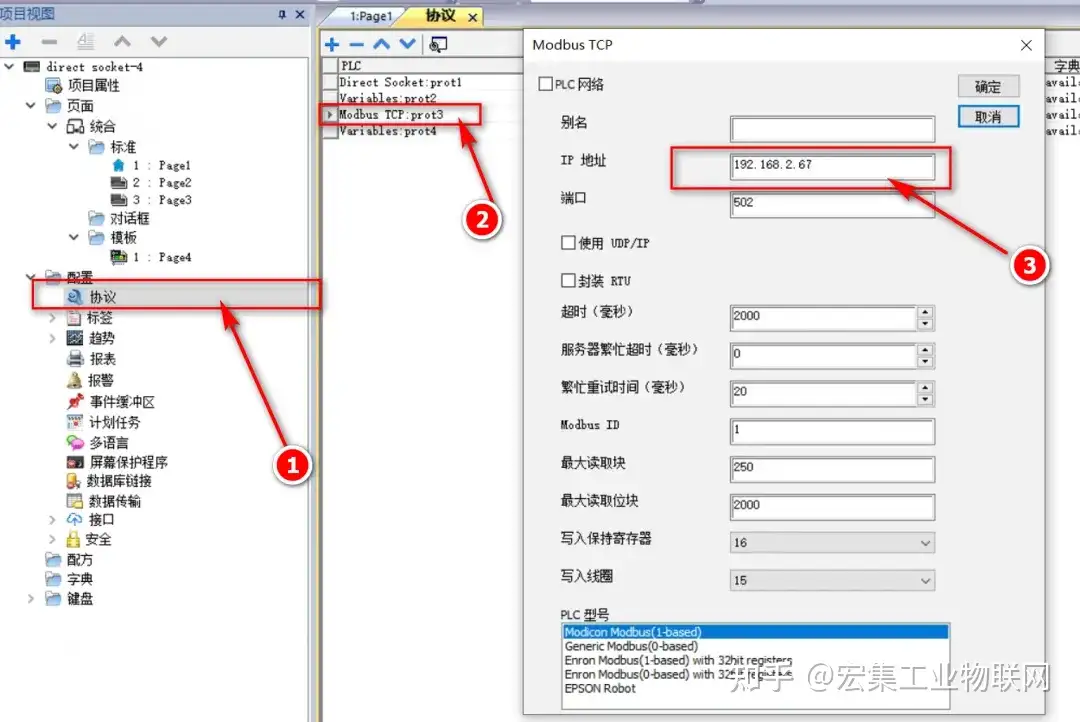
手把手教你通過宏集物聯(lián)網(wǎng)工控屏&網(wǎng)關(guān)進(jìn)行協(xié)議轉(zhuǎn)換,將底層PLC/傳感器的數(shù)據(jù)轉(zhuǎn)換為TCP協(xié)議并傳輸?shù)接脩?/a>
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論