 機器視覺運動控制一體機在DELTA并聯機械手對位貼合應用
機器視覺運動控制一體機在DELTA并聯機械手對位貼合應用
市場應用背景
DELTA并聯機械手采用獨特的三角形底座和輕量化互連臂設計,能夠在三維空間內靈活運動,并通過中央末端執行器完成各種任務。末端執行器可根據具體應用需求進行定制,廣泛應用于抓取裝配、包裝貼合、物料分揀等場景。其結構設計以高速、高精度和高靈活性著稱,因此在制造、包裝和裝配等行業中備受青睞。
通過機器視覺的深度融合,DELTA并聯機械手進一步拓展了應用邊界,為自動化生產帶來了更多可能性,成為推動工業智能化升級的重要力量。
市面上常見的傳統方案:
傳統方案通常需要組合多個獨立組件,包括機器人控制柜、工控機、視覺軟件、PLC以及定制開發的工藝包程序,不僅增加了系統復雜性,還提高了成本和開發周期。
受限于傳統多組件集成方式,往往會面臨以下問題:
1.配件多、接線繁瑣、故障排查麻煩、開發周期長;
2.視覺與運動控制之間的數據交互效率不高;
3.軟硬集成度不高,功能整合度低;
4.多套硬件初始成本和維護成本高。
正運動技術解決方案優勢:
相較于傳統市場方案,正運動技術的解決方案在系統集成度上具有顯著優勢。而正運動技術基于VPLC系列視覺運動控制一體機和RTFuse視覺方案,打造了一站式解決方案,特別針對DELTA視覺定位貼合應用場景進行了深度優化。
該方案實現了即插即用,能夠快速滿足市場常見的各種輔料貼合需求。通過簡化系統架構,正運動技術顯著提升了設備的兼容性,并支持快速物料切換和工藝配置,大幅提高了生產效率和靈活性 。

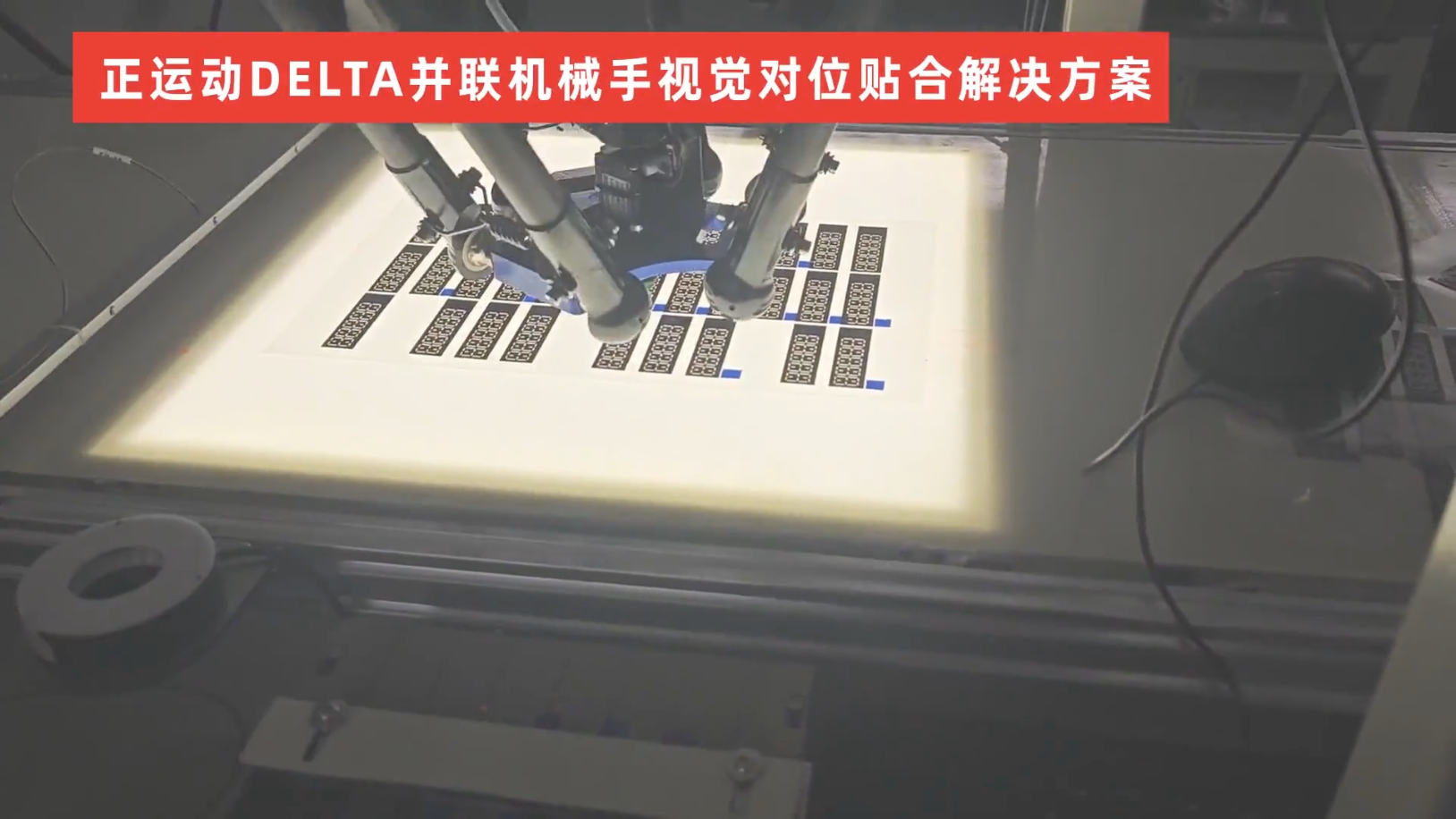
01 機器視覺運動控制一體機在DELTA并聯機械手視覺貼合應用
DELTA并聯機械手視覺貼合工藝運行視頻可點擊→“機器視覺運動控制一體機在DELTA并聯機械手對位貼合應用”查看。
正運動DELTA視覺對位貼合解決方案設計

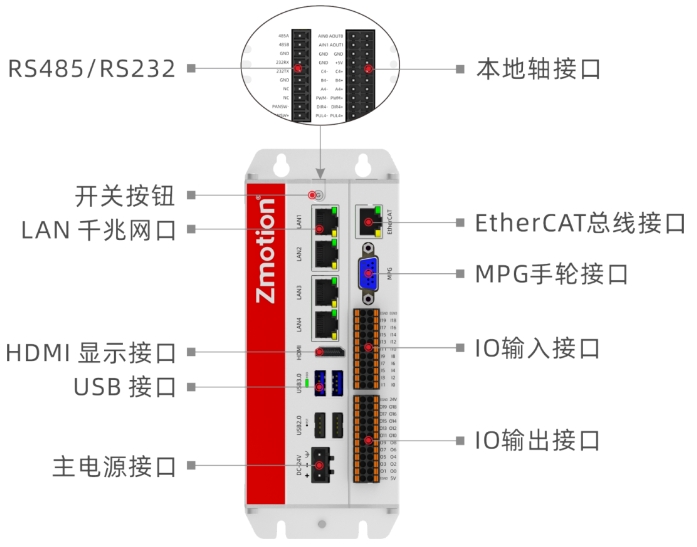
24DI:接啟動/復位/停止按鈕、氣壓檢測、皮帶到位信號等;
12DO:接下相機飛拍、飛達供料器、破/吸真空、三色燈蜂鳴器等;
EtherCAT接口:接EtherCAT總線驅動器,控制DELTA并聯機械手;
4路單端脈沖輸出:接步進/脈沖驅動器、編碼器軸;
EtherNET接口:千兆網口,接支持Gige協議的面陣相機,實現視覺定位、糾偏應用。
運動控制工藝實現
(1)機器視覺:
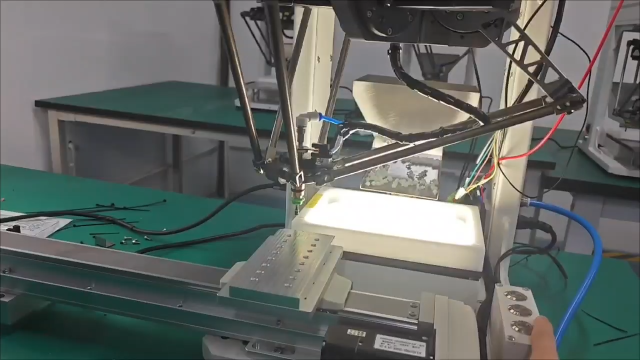
視覺定位與對位流程
通過上相機對皮帶上的物料進行視覺拍照定位,DELTA并聯機械手根據視覺定位數據從飛達供料器上取標簽并進行對位。對于精度要求較高的產品,系統可增加下相機,在飛達供料器取料后,通過下相機進行飛拍,實現二次糾偏,進一步提升對位精度。
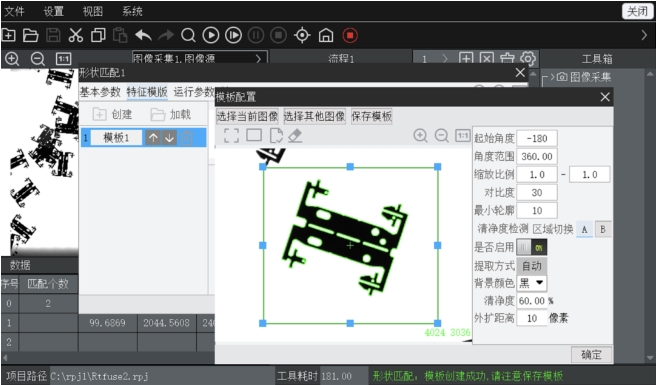
視覺定位功能
視覺定位主要依賴形狀匹配技術,通過預設的形狀、尺寸、Mark點等特征,精準匹配并定位目標物料。系統通過坐標系校準,將物料的世界坐標實時傳輸給DELTA并聯機械手,確保機械手能夠準確抓取并對位。
(2)運動控制:
貼標流程
飛達供料器將標簽剝離并放置在平臺上,控制器驅動DELTA并聯機械手抓取標簽,并移動至下相機進行二次糾偏,確保標簽位置的精確性。視覺系統提供定位數據,機械手沿預設路徑移動,依次拾取物料并將其精準放置到指定位置。用戶可通過快速示教功能,靈活設置拾取、放置、拍攝等運動軌跡,提升操作效率。
異常處理與循環抓取
在抓取過程中,若當前吸嘴檢測到無標簽,系統會自動觸發飛達供料器繼續出標,直至出現可抓取的標簽。系統會循環執行抓取、糾偏和貼標操作,確保流程的連續性和穩定性。

動作軌跡設置

運動模式類型
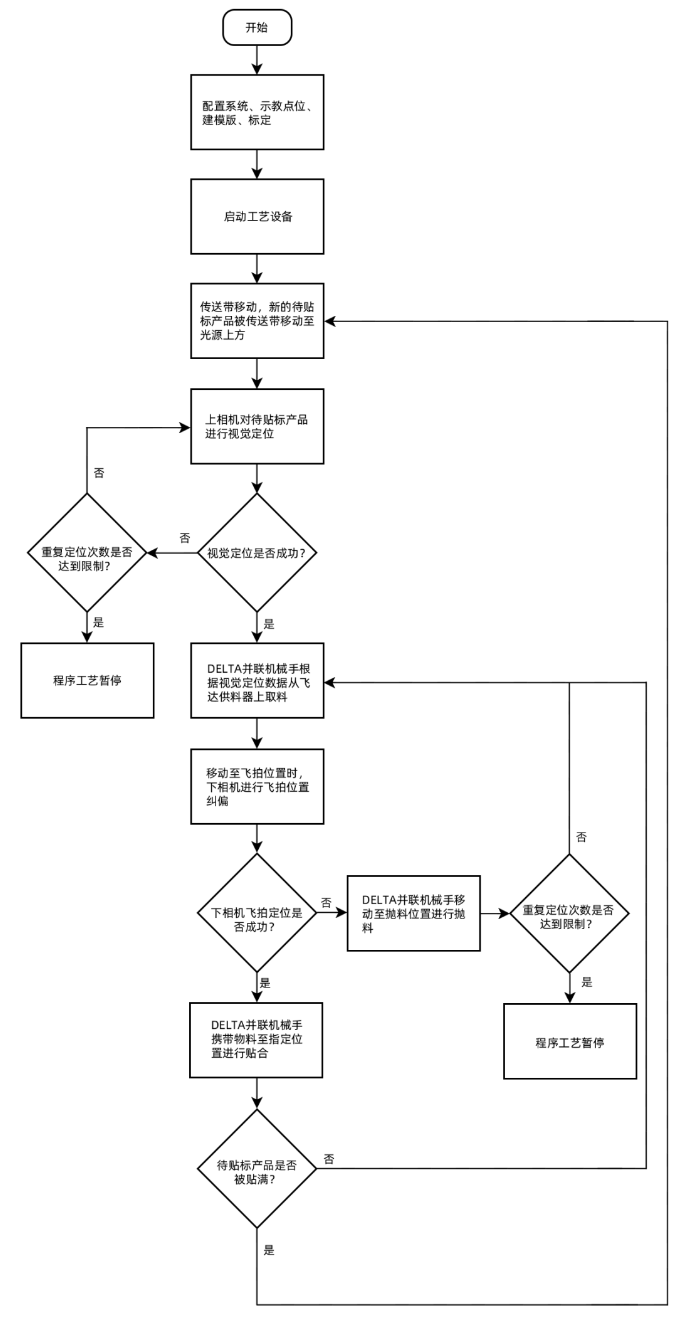
DELTA視覺對位貼合工藝流程
方案核心優勢
操作簡便:采用拖拽式中文組態界面,應用工程師經過簡單培訓即可快速上手,降低技術門檻。
開發高效:提供成熟的視覺機械手貼標解決方案,大幅縮短項目開發周期,減少用戶的時間成本。
高度集成:支持EtherCAT總線和脈沖混合控制,集成了機器視覺、運動控制和IO邏輯控制,軟硬件一體化設計,便于設備調試和故障排查。
節省人力成本:單人即可完成設備的運動控制、視覺調試和IO邏輯控制,有效應對工程人員流失問題,降低企業用人成本。
柔性生產:系統支持多物料視覺和運控配置程序存儲,一鍵切換工藝包,靈活應對不同尺寸和形狀的工件,減少硬件更換頻率,縮短產線停機時間。
解決方案硬件配置

02 VPLC712機器視覺運動控制一體機
正運動技術VPLC712機器視覺運動控制一體機是一款基于x86架構的EtherCAT總線視覺運動控制器,采用一體化設計,將實時機器視覺、運動控制、IO和監控集成于一臺多核控制器上,實現多任務并行實時處理自動化設備任務,通過共享內存機制,將PC部分硬件資源通過MotionRT7進行配置,實現核內高速交互,驅動執行器進行對應操作,完成設備整體的控制。
VPLC系列機器視覺運動控制一體機的安裝與拆卸過程便捷,占地空間小,還能與其它控制單元部件(如伺服驅動器、傳感器、編碼器、控制閥等)無縫集成,提供一個完整端到端的視覺運動控制解決方案。
面向高速高精智能裝備在“PC+運動控制卡”的模式下,實現多軸同步控制和高速高精運動控制!
03 RTFuse視覺對位貼合應用
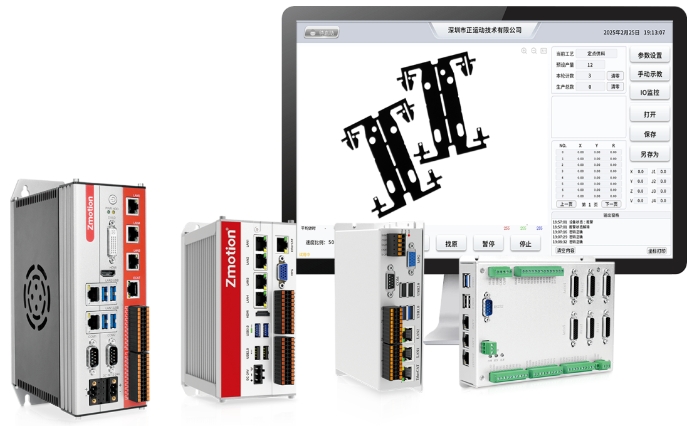
正運動技術基于VPLC系列視覺運動控制一體機,推出RTFuse視覺對位貼合解決方案。該方案結合點位示教與RTFuse視覺組態功能,為用戶提供一站式、快速開發的視覺對位貼合設備,顯著縮短項目開發周期。操作員只需簡單調整視覺與運動控制功能模塊的參數,即可快速完成物料轉換,實現高速、高精度的機械手對位貼合,滿足多樣化生產需求。
▌相機支持
支持市面上大部分主流相機,支持4個相機并行采集、視覺飛拍。
▌快速配置
機械手、軸組、飛達供料、相機和矩陣取料、工具參數。
▌示教功能
提供取料、飛拍及放料路徑等多個點位的一鍵示教功能。
▌坐標校準
支持相機標定,包括修改XY坐標方向和世界坐標位置補正。
▌走位標定
通過示教好的運動點位,一鍵即可完成自動標定。
▌系統切換
可切換至RTFuse視覺組態系統,實現視覺檢測流程。
▌可視化界面
界面友好,便于用戶數據監控,實時顯示使能狀態、回原狀態、定位數量和擺放計數等。
▌支持機械手類型
4軸模組、SCARA機械手、DELTA并聯機械手、直角坐標機械手、6關節等

正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等。
審核編輯 黃宇
-
機器視覺
+關注
關注
163文章
4440瀏覽量
121209 -
運動控制
+關注
關注
4文章
603瀏覽量
33094 -
機械手
+關注
關注
7文章
343瀏覽量
29904
發布評論請先 登錄
相關推薦












 工商網監
工商網監
評論