 【北京迅為】iTOP-RK3568開發板鴻蒙OpenHarmony系統南向驅動開發實操-HDF驅動配置UART
【北京迅為】iTOP-RK3568開發板鴻蒙OpenHarmony系統南向驅動開發實操-HDF驅動配置UART

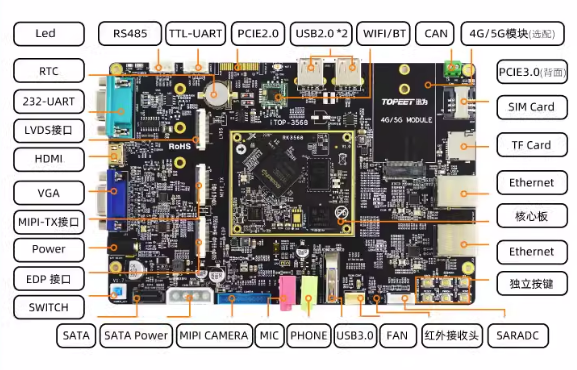
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工藝,搭載一顆四核Cortex-A55處理器和Mali G52 2EE 圖形處理器。RK3568 支持4K 解碼和 1080P 編碼,支持SATA/PCIE/USB3.0 外圍接口。RK3568內置獨立NPU,可用于輕量級人工智能應用。RK3568 支持安卓 11 和 linux 系統,主要面向物聯網網關、NVR 存儲、工控平板、工業檢測、工控盒、卡拉 OK、云終端、車載中控等行業。
?
【本文摘自】【北京迅為】iTOP-RK3568OpenHarmony系統南向驅動開發
【相關視頻】OpenHarmony學習開發系列教程(第1期 北向基礎篇一)
OpenHarmony學習開發系列教程(第2期 南向基礎篇一)
第6章 實操-HDF驅動配置UART
6.1 修改HCS配置
對于不同的平臺,需要在對應的平臺目錄修改對應的hcs文件,接下來示例為在rk3568下新增uart4 uart9 uart7的修改方法。
修改vendor/hihope/rk3568/hdf_config/khdf/device_info/device_info.hcs文件,device_info.hcs中添加以下內容:
device3 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_4";
deviceMatchAttr = "rockchip_rk3568_uart_4";
}
device4 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_7";
deviceMatchAttr = "rockchip_rk3568_uart_7";
}
device5 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_9";
deviceMatchAttr = "rockchip_rk3568_uart_9";
}
在配置過程中要注意以下幾點:
1 device3,device4,device5是自定義的,可以根據實際情況修改
2 policy表示服務策略,取值為0時,表示不發布服務,取值為1時表示向內核態發布服務,取值為2時表示向內核用戶態發布服務
3 moduleName的值要與驅動實現的HdfDriverEntry結構體中的moduleName相同。
4 deviceMatchAttr的值表示驅動的私有配置信息
5 serviceName表示服務名稱,服務加載成功之后會在開發板的/dev/目錄下生成節點。例如HDF_PLATFORM_UART_9后面跟著的數據9是UartOpen()的端口號
6.2 配置rk3568_uart_config.hcs
修改vendor/hihope/rk3568/hdf_config/khdf/platform/rk3568_uart_config.hcs文件,添加如下內容,如下所示:
device_uart_0x0004 :: uart_device {
num = 4;
match_attr = "rockchip_rk3568_uart_4";
}
device_uart_0x0007 :: uart_device {
num = 7;
match_attr = "rockchip_rk3568_uart_7";
}
device_uart_0x0009 :: uart_device {
num = 9;
match_attr = "rockchip_rk3568_uart_9";
}
在上面的配置中需要注意以下幾點:
1 device_uart_0x0004中的后綴“0x0004”是串口編號。
2 num 與driver_name值“ttyS”組成驅動設備名,例如ttyS4。UartOpen函數參數port,則表示上述uart設備排列序號,比如num=4 的UartOpen函數port=4。
3 match_attr的名稱必須是rockchip_rk3568_uart_x,和device_info.hcs中要寫一樣。
6.3 Openharmony UART平臺驅動
在drivers/hdf_core/adapter/khdf/linux/platform/uart/uart_adapter.c 中編寫了對接Linux UART驅動的相關代碼,這部分不需要大家進行修改,感興趣的話可以自己研究下uart_adapter.c文件。
6.4 UART應用開發
6.4.1 UART驅動API接口介紹
UART驅動API接口如下所示,具體的API詳見drivers/hdf_core/framework/include/platform/uart_if.h文件。

UartOpen
在使用UART進行通信時,首先要調用UartOpen獲取UART設備句柄,該函數會返回指定端口號的UART設備句柄。函數原型如下所示:
DevHandle UartOpen(uint32_t port);
其中,參數port是UART設備號。UartOpen返回值為NULL表示獲取UART設備句柄失敗,正常情況下返回UART設備句柄。
假設系統重的UART端口號為4,獲取該UART設備句柄的示例如下所示
DevHandle handle = NULL; // UART設備句柄
uint32_t port = 4; // UART設備端口號
handle = UartOpen(port);
if (handle == NULL) {
HDF_LOGE("UartOpen: open uart_%u failed!\n", port);
return;
}
UartSetBaud
在通信之前,需要設置UART的波特率,函數原型如下所示:
int32_t UartSetBaud(DevHandle handle, uint32_t baudRate);
其中,參數handle表示UART設備句柄,baudRate表示待設置的波特率值。UartSetBaud返回值為HDF_SUCCESS表示波特率設置成功,返回值為負數表示UART設置波特率失敗。
UartGetBaud
設置UART的波特率后,可以通過獲取波特率接口來查看UART當前的波特率。函數原型如下所示:
int32_t UartGetBaud(DevHandle handle, uint32_t *baudRate);
其中,參數handle表示UART設備句柄,baudRate表示待設置的波特率值。UartSetBaud返回值為HDF_SUCCESS表示獲取波特率成功,返回值為負數表示UART獲取波特率失敗。
UartSetAttribute
在通信之前,需要設置UART的設備屬性。函數原型如下所示:
int32_t UartSetAttribute(DevHandle handle, struct UartAttribute *attribute);
其中,handle表示UARt設備句柄,attribute表示待設置的設備屬性。UartSetAttribute返回值為HDF_SUCCESS表示UART設置屬性成功,返回值為負數表示UART設置設備屬性失敗。
UartGetAttribute
設置UART的設備屬性后,可以通過獲取設備屬性接口來查看UART當前的設備屬性。函數原型如下所示:
int32_t UartGetAttribute(DevHandle handle, struct UartAttribute *attribute);
其中,handle表示UART設備句柄,attribute表示接收UART設備屬性的指針。UartGetAttribute返回值為HDF_SUCCESS表示UART獲取屬性成功,返回值為負數表示UART獲取設備屬性失敗。
UartSetTransMode
在通信之前,需要設置UART的傳輸模式。函數原型如下所示:
int32_t UartSetTransMode(DevHandle handle, enum UartTransMode mode);
其中,handle表示UART設備句柄,mode表示待設置的傳輸模式。UartSetTransMode返回值為HDF_SUCCESS表示UART設置傳輸模式成功,返回值返回負數表示UART設置傳輸模式失敗。
UartWrite
向UART設備寫入指定長度的數據。函數原型如下所示:
int32_t UartWrite(DevHandle handle, uint8_t *data, uint32_t size);
其中,handle表示UART設備句柄,data表示待寫入數據的指針,size表示待寫入數據的長度。
UartWrite返回值為HDF_SUCCESS表示UART寫數據成功,返回值為負數表示UART寫數據失敗。
UartRead
從UART設備中讀取指定長度的數據,函數原型如下所示:
int32_t UartRead(DevHandle handle, uint8_t *data, uint32_t size);
其中,參數handle表示UART設備句柄,data表示接收讀取數據的指針,size表示待讀取數據的長度。UartRead返回值為非負數表示UART讀取到的數據長度,返回值為負數,表示UART讀取數據失敗。
UartClose
UART通信完成之后,需要銷毀UART設備句柄,函數原型如下所示:
void UartClose(DevHandle handle);
其中,參數handle表示UART設備句柄。
6.4.2 編寫應用測試APP
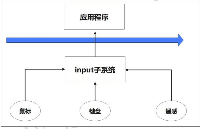
使用UART的一般流程如下所示:
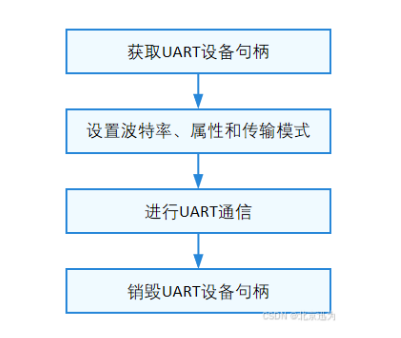
接下來編寫應用測試文件uart_test.c,完整代碼如下所示:
#include "stdio.h"
#include "stdlib.h"
#include "unistd.h"
#include "hdf_base.h"
#include "hdf_io_service.h"
#include "hilog/log.h"
#include "uart_if.h" // 假設這個頭文件包含了所有UART相關函數的聲明和宏定義
#define STRING_MAXSIZE 100
#define HDF_SUCCESS 0
// 假設這些宏在uart_if.h中定義
#ifndef PRINT_ERROR
#define PRINT_ERROR(...) fprintf(stderr, __VA_ARGS__)
#endif
#ifndef PRINT_INFO
#define PRINT_INFO(...) printf(__VA_ARGS__)
#endif
int main(int argc, char* argv[])
{
DevHandle handle = NULL;
struct UartAttribute attribute;
int32_t ret = 0;
uint8_t wbuff[STRING_MAXSIZE] = "HelloWorld";
uint8_t rbuff[STRING_MAXSIZE] = {0}; // 初始化接收緩沖區為0
uint32_t m_uart_port = atoi(argv[1]); // UART端口的標識符
uint32_t m_uart_baudrate = 115200; // UART的波特率
// 初始化UART屬性
attribute.dataBits = UART_ATTR_DATABIT_8; // UART傳輸數據位寬,一次傳輸8個bit
attribute.parity = UART_ATTR_PARITY_NONE; // UART傳輸數據無校檢
attribute.stopBits = UART_ATTR_STOPBIT_1; // UART傳輸數據停止位為1位
attribute.rts = UART_ATTR_RTS_DIS; // UART禁用RTS
attribute.cts = UART_ATTR_CTS_DIS; // UART禁用CTS
attribute.fifoRxEn = UART_ATTR_RX_FIFO_EN; // UART使能RX FIFO
attribute.fifoTxEn = UART_ATTR_TX_FIFO_EN; // UART使能TX FIFO
// 打開UART設備
handle = UartOpen(m_uart_port);
if (handle == NULL) {
PRINT_ERROR("UartOpen: open uart port %u failed!\n", m_uart_port);
return -1;
}
PRINT_INFO("UartOpen successful and uart port = %u\n", m_uart_port);
// 設置UART波特率
ret = UartSetBaud(handle, m_uart_baudrate);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetBaud: set baud failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetBaud successful and uart baudrate = %u\n", m_uart_baudrate);
// 設置UART設備屬性
ret = UartSetAttribute(handle, &attribute);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetAttribute: set attribute failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetAttribute successful\n");
// 獲取UART設備屬性(可選)
ret = UartGetAttribute(handle, &attribute);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartGetAttribute: get attribute failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartGetAttribute successful\n");
// 設置UART傳輸模式為阻塞模式
ret = UartSetTransMode(handle, UART_MODE_RD_BLOCK);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetTransMode: set trans mode failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetTransMode successful\n");
// 向UART設備寫入數據
ret = UartWrite(handle, wbuff, (uint32_t)strlen((char *)wbuff));
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartWrite: write data failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartWrite successful and wbuff = %s\n", wbuff);
// 從UART設備讀取數據
do{
ret = UartRead(handle, rbuff, STRING_MAXSIZE);
if (ret < 0) {
PRINT_ERROR("UartRead: read data failed, ret %d\n", ret);
goto ERR;
}
sleep(1);
} while (!ret);
rbuff[ret] = '\0'; // 確保字符串以null結尾(如果讀取的是文本數據)
PRINT_INFO("UartRead successful and rbuff = %s\n", rbuff);
ERR:
// 關閉UART設備句柄(確保在handle非空時關閉)
if (handle != NULL) {
UartClose(handle);
}
return ret;
}
接下來編寫應用APP的GN文件BUILD.gn,代碼內容如下所示:
HDF_FRAMEWORKS = "http://drivers/hdf_core/framework"
HDF_ADAPTER = "http://drivers/hdf_core/adapter"
import("http://build/ohos.gni")
import("$HDF_ADAPTER/uhdf2/uhdf.gni")
print("demos: compile uart_test")
ohos_executable("uart_test"){
sources = ["uart_test.c"]
include_dirs = [
"$HDF_FRAMEWORKS/include",
"$HDF_FRAMEWORKS/include/core",
"$HDF_FRAMEWORKS/include/osal",
"$HDF_FRAMEWORKS/include/platform",
"$HDF_FRAMEWORKS/include/utils",
"$HDF_ADAPTER/uhdf2/ipc/include",
"$HDF_ADAPTER/uhdf2/osal/include",
"http://base/hiviewdfx/hilog/interfaces/native/innerkits/include",
"http://third_party/bounds_checking_function/include",
]
external_deps = [
"c_utils:utils",
"hdf_core:libhdf_platform",
"hdf_core:libhdf_utils",
"hilog:libhilog",
]
cflags = [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-format",
"-Wno-format-extra-args",
]
part_name = "demos"
install_enable = true
}
6.5 編譯源碼
重新編譯Openharmony4.1源碼,如下所示:
./build.sh --product-name rk3568 --ccache
或者單獨編譯部件
./build.sh --product-name rk3568 --build-target demos --ccache
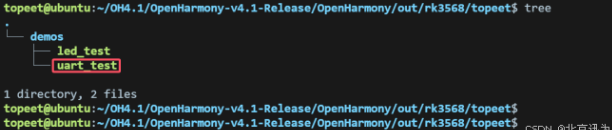
編譯之后,在源碼out/rk3568/topeet目錄下生成編譯產物,如下圖所示:
6.6 UART測試
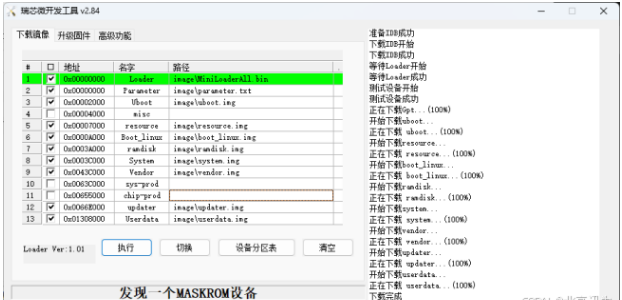
將編譯好的鏡像全部進行燒寫,鏡像在源碼根目錄out/rk3568/packages/phone/images/目錄下。
燒寫完成之后,連接串口工具,本小節將要測試串口9,對應的設備節點是/dev/HDF_PLATFORM_UART_9。
作者使用usb轉TTL(需要自行準備)來進行測試,如下圖所示:

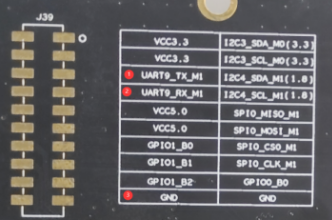
串口9在開發板底板的背面,如下圖所示,USB轉TTL的RXD要使用導線連接到開發板串口9的UART9_TX_M1,USB轉TTL的TXD要使用導線連接到開發板串口9的UART9_RX_M1,USB轉TTL的地接到GND。
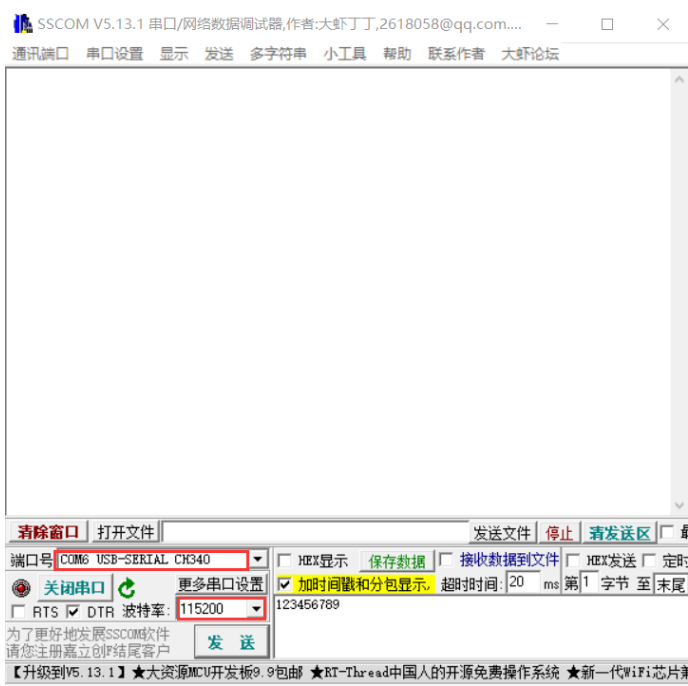
在電腦上打開串口助手,選擇串口4對應的串口號和波特率,注意:默認波特率為115200!
打開串口,如下圖所示:
輸入以下命令運行測試程序發送數據和接收數據,發送的數據為112233445678,數據信息可以自定義。
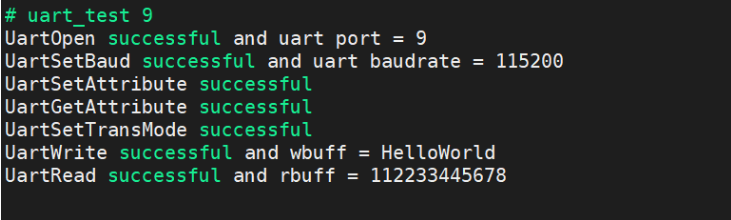
uart_test 9
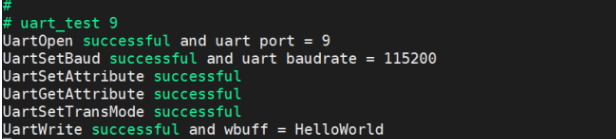
串口軟件接收到字符串“HelloWorld”
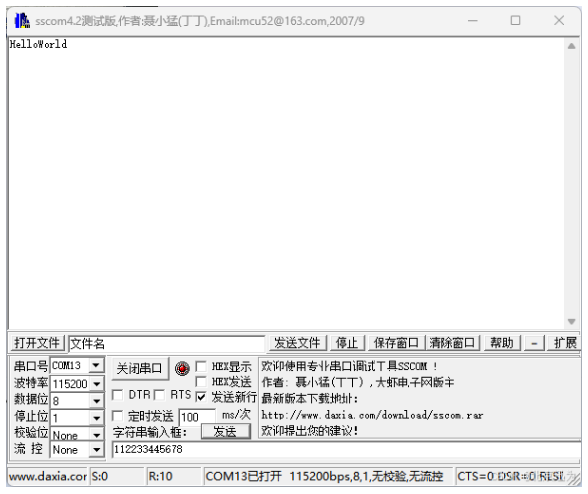
然后在串口軟件發送數據“112233445678”,如下圖所示:
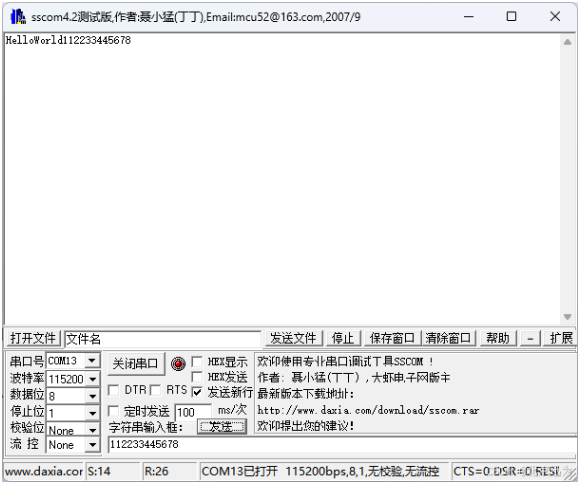
串口終端收到發送的字符串,如下圖所示:
至此,串口實驗完結。
-
開發板
+關注
關注
25文章
5661瀏覽量
104460 -
OpenHarmony
+關注
關注
29文章
3848瀏覽量
18554 -
RK3568
+關注
關注
5文章
584瀏覽量
6376 -
迅為電子
+關注
關注
0文章
64瀏覽量
175
發布評論請先 登錄
迅為RK3568開發板篇OpenHarmony配置HDF驅動控制LED-新增 topeet子系統
迅為RK3568開發板篇OpenHarmony實操HDF驅動控制LED-編寫內核 LED HDF 驅動程序
迅為RK3568開發板篇OpenHarmony實操HDF驅動控制LED-添加內核編譯
迅為RK3568開發板實操-HDF驅動配置UART-修改HCS配置

【北京迅為】itop-RK3568開發板驅動開發指南

【北京迅為】iTOP-RK3568OpenHarmony系統南向驅動開發GPIO基礎知識
北京迅為iTOP-RK3568開發板OpenHarmony系統南向驅動開發實操-HDF驅動配置LED
【北京迅為】iTOP-RK3568開發板OpenHarmony系統南向驅動開發-第4章 UART基礎知識





 工商網監
工商網監
評論