") 基于EFISH-SBC-RK3576的運(yùn)動控制與姿態(tài)感知方案
基于EFISH-SBC-RK3576的運(yùn)動控制與姿態(tài)感知方案
一、方案背景
工業(yè)機(jī)器人、AGV等智能裝備對?厘米級定位精度?、?毫秒級響應(yīng)延遲?、?復(fù)雜工況適應(yīng)性?提出嚴(yán)苛要求。傳統(tǒng)方案在?多傳感器時空同步?、?動態(tài)障礙物識別?、?IMU漂移抑制?等方面存在技術(shù)瓶頸。
電魚智能推出?EFISH-SBC-RK3576工控板?,可擴(kuò)展多模態(tài)傳感接口與硬件加速引擎,進(jìn)而滿足ISO 3691-4:2020 AGV安全標(biāo)準(zhǔn),為智能裝備提供?全棧式運(yùn)動控制硬件方案?。
二、核心功能模塊
1.?高精度感知矩陣?
| 傳感器類型 | 技術(shù)特性 | 性能指標(biāo) |
|---|---|---|
| ?LiDAR? |
雙模式接口: - USB3.0(5Gbps) - MIPI CSI-2(4 Lane) |
點(diǎn)云幀率60Hz 探測距離0.1-100m |
| ?IMU? |
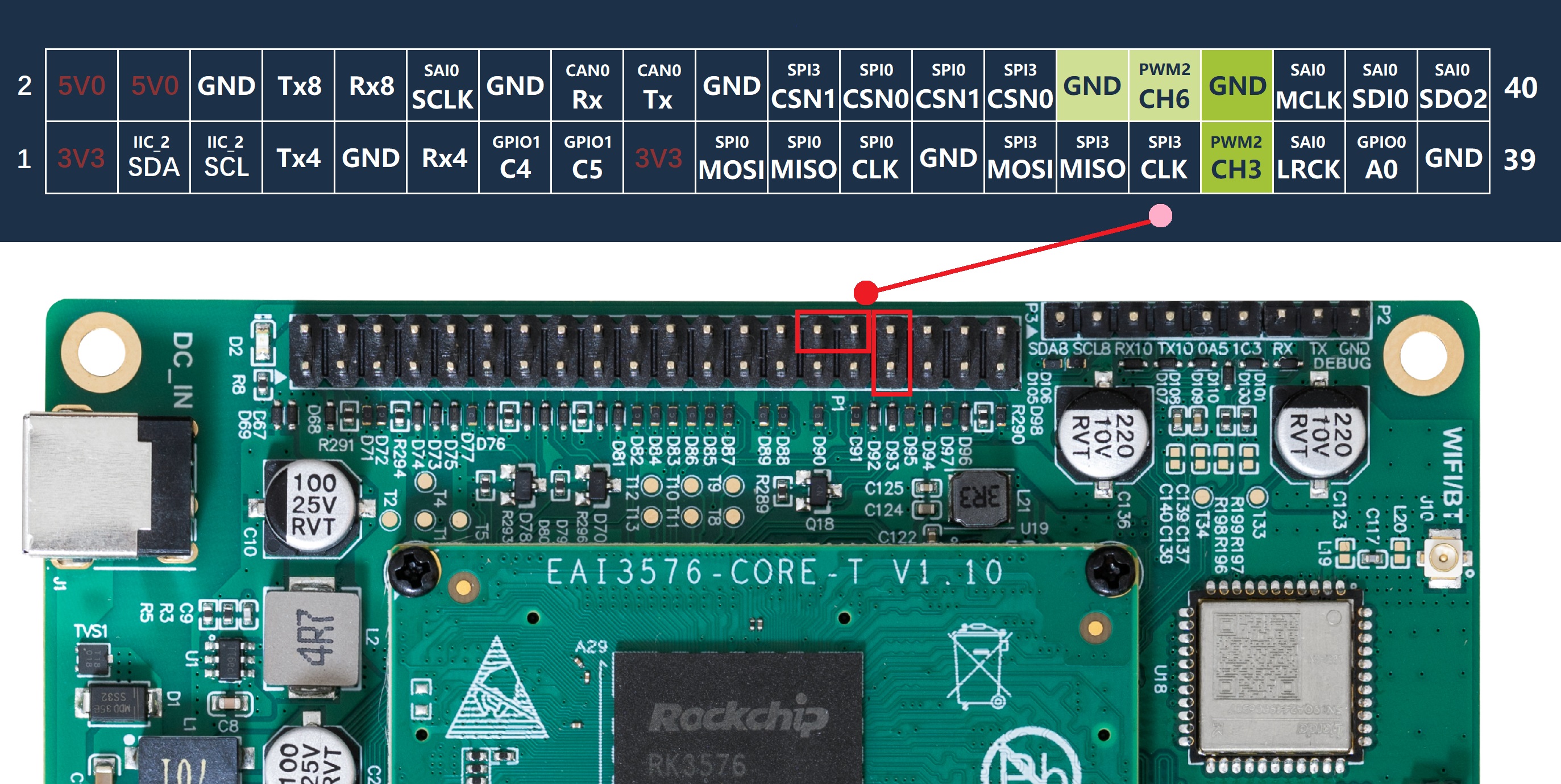
六軸數(shù)據(jù)融合(MPU6050): -三軸加速度 ±16g -三軸角速度 ±2000°/s |
數(shù)據(jù)輸出率1kHz 零偏穩(wěn)定性0.5°/h |
?增強(qiáng)設(shè)計(jì)?:
LiDAR-IMU硬件同步觸發(fā)(時間戳對齊精度<10μs)
自適應(yīng)抗振動算法(抑制>80%高頻機(jī)械噪聲)
2.?實(shí)時運(yùn)動控制引擎?
?異構(gòu)計(jì)算架構(gòu)?:
NPU加速點(diǎn)云分割(128GOPS算力)
FPGA實(shí)現(xiàn)PID控制環(huán)(響應(yīng)周期50μs)
?安全防護(hù)機(jī)制?:
電子圍欄動態(tài)生成(支持3D點(diǎn)云建模)
緊急制動信號硬件直連(響應(yīng)延遲<1ms)
三、系統(tǒng)架構(gòu)設(shè)計(jì)
graph LR
A[LiDAR] -->|MIPI CSI-2| B{傳感融合中心}
C[IMU] -->|I2C| B
B --> D[EFISH-SBC-RK3576]
D --> E[點(diǎn)云特征提取]
D --> F[姿態(tài)解算引擎]
E & F --> G[SLAM實(shí)時建圖]
G --> H[運(yùn)動軌跡規(guī)劃]
H --> I[電機(jī)驅(qū)動信號]
I --> J[AGV執(zhí)行機(jī)構(gòu)]
核心算法特性
?多傳感器標(biāo)定?:
自動外參標(biāo)定(LiDAR-IMU坐標(biāo)系轉(zhuǎn)換)
在線溫度補(bǔ)償(IMU零偏漂移抑制)
?動態(tài)障礙處理?:
點(diǎn)云聚類分析(DBSCAN加速算法)
運(yùn)動預(yù)測模型(卡爾曼濾波+RNN網(wǎng)絡(luò))
四、典型應(yīng)用場景
1.?工業(yè)AGV集群調(diào)度?
360°避障檢測(最小安全距離10cm)
多車協(xié)同路徑規(guī)劃(沖突消解算法)
支持反光板/自然導(dǎo)航雙模式切換
2.?服務(wù)機(jī)器人運(yùn)動控制?
人體跟隨算法(點(diǎn)云骨骼識別)
防跌落檢測(TOF+IMU數(shù)據(jù)融合)
自適應(yīng)地形通過(姿態(tài)角實(shí)時調(diào)整)
3.?無人機(jī)精準(zhǔn)起降?
視覺-激光融合定位(著陸點(diǎn)識別精度±2cm)
抗風(fēng)擾控制算法(IMU數(shù)據(jù)前饋補(bǔ)償)
緊急避障懸停(反應(yīng)時間<80ms)
五、技術(shù)性能預(yù)計(jì)優(yōu)勢
| 參數(shù) | 傳統(tǒng)方案 | 本方案 |
|---|---|---|
| 定位精度 | ±5cm | ±1cm |
| 控制響應(yīng)延遲 | 200ms | 50ms |
| 連續(xù)工作時長 | 8h | 24h(智能功耗管理) |
| 振動適應(yīng)性 | 5Grms | 20Grms(ISO 10816-3) |
六、開發(fā)方向
1.?硬件部署?
LiDAR支架3D模型(STEP格式)
IMU校準(zhǔn)工裝設(shè)計(jì)圖
2.?所需算法資源?
開源運(yùn)動控制算法(模型預(yù)測控制/自適應(yīng)PID)
3.?后續(xù)認(rèn)證?工作
CE機(jī)械指令認(rèn)證
功能安全評估報告(ISO 13849 PLd)
審核編輯 黃宇
-
運(yùn)動控制
+關(guān)注
關(guān)注
4文章
643瀏覽量
33428 -
rk3576
+關(guān)注
關(guān)注
1文章
158瀏覽量
613
發(fā)布評論請先 登錄
Mpp支持RK3576么
RK3576 vs RK3588:為何越來越多的開發(fā)者轉(zhuǎn)向RK3576?
RK3576+紫光同創(chuàng)FPGA并口通信方案 基于DSMC/FlexBus并口的RK3576J與FPGA通信方案

基于EFISH-SBC-RK3576的無人機(jī)智能飛控與數(shù)據(jù)存儲方案
環(huán)境感知套件開發(fā)指南:精準(zhǔn)數(shù)據(jù)采集與智能控制實(shí)戰(zhàn)?
邊緣AI協(xié)處理開發(fā)指南:USB+NPU混合計(jì)算與實(shí)時視頻分析實(shí)戰(zhàn)?
電魚智能EFISH-RK3576-SBC技術(shù)全解析:八核異構(gòu)架構(gòu)的工業(yè)突圍
電魚智能EFISH-RK3576-SBC工控板的五大優(yōu)勢詳解
探索 RK3576 方案:卓越性能與靈活框架,誠邀開發(fā)定制合作!
人臉疲勞檢測應(yīng)用-米爾基于RK3576核心板/開發(fā)板

RK3588與RK3576區(qū)別解析
RK3576單板發(fā)布倒計(jì)時:RK3399與RK3576對比
新品體驗(yàn) | RK3576開發(fā)板







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論