 【CW32模塊使用】TB6612電機驅動模塊
【CW32模塊使用】TB6612電機驅動模塊
該模塊相對于傳統的L298N效率上提高很多,體積上也大幅度減少,在額定范圍內,芯片基本不發熱,當然也就顯得更加嬌貴,所以我們建議有一定動手能力的朋友使用,接線的時候務必細心細心再細心,注意正負極性。
一、模塊來源
模塊實物展示:

二、規格參數
VM電機電壓:< 12V
VCC芯片電壓:2.7~5.5V
輸出電流:1A
控制方式:PWM
以上信息見廠家資料文件
三、移植過程
我們的目標是將例程移植至CW32F030C8T6開發板上【能夠控制電機旋轉速度的功能】。首先要獲取資料,查看數據手冊應如何實現讀取數據,再移植至我們的工程。
3.1查看資料
STBY口接單片機的IO口,STBY置0電機全部停止,置1才能工作。STBY置1后通過AIN1、AIN2、BIN1、BIN2 來控制正反轉。
| AIN1 | 0 | 0 | 1 | 1 |
|---|---|---|---|---|
| AIN2 | 0 | 1 | 0 | 1 |
| 停止 | 正轉 | 反轉 | 停止 |
其中A端(AIN1與AIN2)只能控制AO1與AO2端。B端(BIN1與BIN2)只能控制BO1與BO2端。因此是雙路電機驅動。
3.2引腳選擇
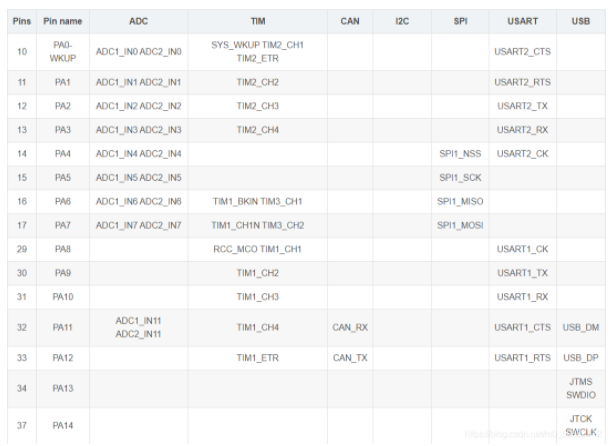
PWMA為控制A端電機速度的引腳,通過PWM的占空比大小控制電機速度。這里選擇PA6,其有復用功能GTIM3_CH1,意為通用定時器3的PWM通道1。

這里將STBY接入3.3V,讓其一直為高電平,后續的電機停止控制通過IN1與IN2進行控制。
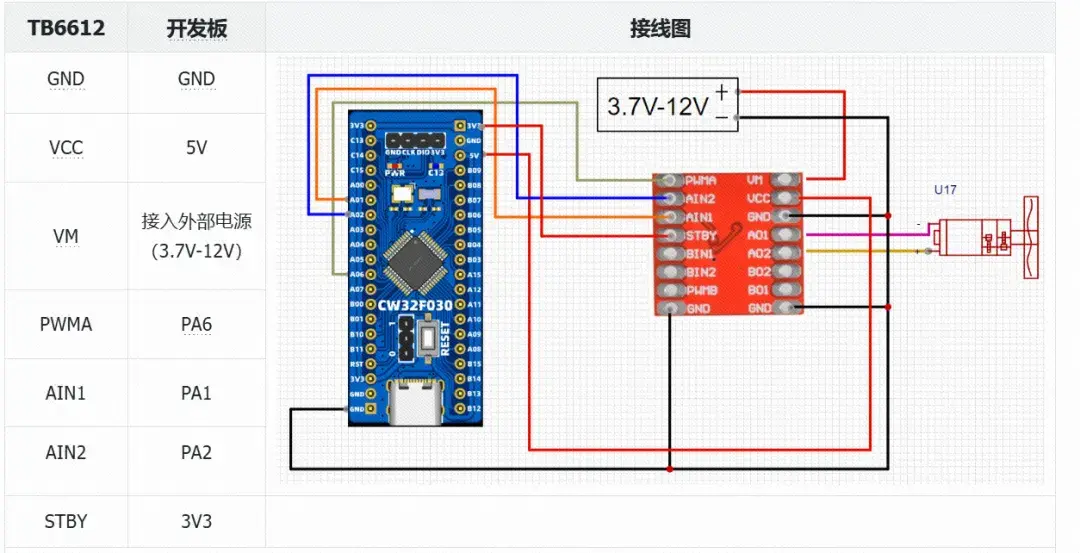
模塊接線圖
3.3移植至工程
移植步驟中的導入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_tb6612.c與bsp_tb6612.h。這里不再過多講述,移植完成后面修改相關代碼。
在文件bsp_tb6612.c中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-24 LCKFB-LP first version */ #include "bsp_tb6612.h" /************************************************ 函數名稱 : TB6612_Init 功 能 : TB6612的配置 參 數 : ReloadValue:重裝載值設置 返 回 值 : 無 作 者 : LC *************************************************/ void TB6612_Init(uint16_t ReloadValue) { RCC_TB6612_GPIO_ENABLE(); // 使能GPIO時鐘 RCC_PWMA_TIMER_ENABLE(); // 使能通用定時器1時鐘 GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結構體 GPIO_InitStruct.Pins = GPIO_PWMA; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_AF_PWM_ENABLE(); // 使用GPIO復用功能 GPIO_Init(TB6612_GPIO_PORT, &GPIO_InitStruct); // 初始化 GTIM_InitTypeDef GTIM_InitStruct; // 通用定時器初始化結構體 GTIM_InitStruct.Mode = GTIM_MODE_TIME; // 定時器模式 GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE; // 連續計數模式 GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV64; // DCLK = PCLK / 64 = 64MHz/64 = 1MHz GTIM_InitStruct.ReloadValue = ReloadValue; // 重裝載值設置 GTIM_InitStruct.ToggleOutState = ENABLE; // 輸出翻轉功能 GTIM_TimeBaseInit(BSP_PWMA_TIMER, >IM_InitStruct); // 初始化 GTIM_OCInit(BSP_PWMA_TIMER, BSP_PWMA_CHANNEL, GTIM_OC_OUTPUT_PWM_HIGH); // 配置輸出比較通道為PWM模式 GTIM_Cmd(BSP_PWMA_TIMER, ENABLE); // 使能定時器 AIN_GPIO_INIT(); // 使能AIN的GPIO } void AIN_GPIO_INIT(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_TB6612_GPIO_ENABLE(); // 使能GPIO時鐘 GPIO_InitStructure.Pins = GPIO_AIN1|GPIO_AIN2; GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStructure.Speed = GPIO_SPEED_HIGH; GPIO_Init(TB6612_GPIO_PORT, &GPIO_InitStructure); } /****************************************************************** * 函 數 名 稱:AO_Control * 函 數 說 明:A端口電機控制 * 函 數 形 參:dir旋轉方向 1正轉0反轉 speed旋轉速度,范圍(0 ~ per-1) * 函 數 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void AO_Control(uint8_t dir, uint32_t speed) { if( dir == 1 ) { AIN1_OUT(0); AIN2_OUT(1); } else { AIN1_OUT(1); AIN2_OUT(0); } GTIM_SetCompare1(BSP_PWMA_TIMER, speed ); }
在文件bsp_tb6612.h中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-24 LCKFB-LP first version */ #ifndef _BSP_TB6612_H #define _BSP_TB6612_H #include "board.h" #define RCC_TB6612_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define TB6612_GPIO_PORT CW_GPIOA #define GPIO_AF_PWM_ENABLE() PA06_AFx_GTIM3CH1() // 使用復用功能,復用為通用定時器3通道1 #define GPIO_AIN1 GPIO_PIN_1 #define GPIO_AIN2 GPIO_PIN_2 #define GPIO_PWMA GPIO_PIN_6 #define RCC_PWMA_TIMER_ENABLE() __RCC_GTIM3_CLK_ENABLE() #define BSP_PWMA_TIMER CW_GTIM3 // 定時器 #define BSP_PWMA_CHANNEL GTIM_CHANNEL1 #define AIN1_OUT(X) GPIO_WritePin(TB6612_GPIO_PORT, GPIO_AIN1, X?GPIO_Pin_SET:GPIO_Pin_RESET) #define AIN2_OUT(X) GPIO_WritePin(TB6612_GPIO_PORT, GPIO_AIN2, X?GPIO_Pin_SET:GPIO_Pin_RESET) void AIN_GPIO_INIT(void); void TB6612_Init(uint16_t ReloadValue); void AO_Control(uint8_t dir, uint32_t speed); #endif /* _BSP_TB6612_H */
四、移植驗證
在自己工程中的main主函數中,編寫如下。
/* * Change Logs: * Date Author Notes * 2024-06-24 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_tb6612.h" int32_t main(void) { uint16_t i = 1000; uint8_t flag = 1; board_init(); uart1_init(115200U); TB6612_Init(5000); while(1) { if(flag) { i += 10; if( i >= 4000 ) { i = 4000; flag = 0; } AO_Control(1,i);//A端電機正轉 delay_ms(10); } else { i -= 10; if( i <= 1000 ) { i = 1000; flag = 1; } AO_Control(0,i);//A端電機反轉 delay_ms(10); } } }
移植現象:電機速度由慢變快的正反轉.
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1KReODFKFa4vjTN8qfsaNrQ?pwd=LCKF
提取碼:LCKF
-
電機驅動
+關注
關注
60文章
1299瀏覽量
87637 -
開發板
+關注
關注
25文章
5590瀏覽量
103207 -
驅動模塊
+關注
關注
0文章
65瀏覽量
14407
發布評論請先 登錄
基于tb6612芯片和紅外避障模塊的IO輸出輸入模式
TB6612模塊使用后就燒了,求助一下各位
TB6612模塊使用時芯片發燙
TB6612驅動相關資料推薦
TB6612FNG電機驅動器資料分享
由Adafruit TB6612電機驅動器控制的12V直流電機

基于STM32的PWM電機驅動TB6612、A4950
利用TB6612模塊控制直流電機
STM32平衡小車 TB6612電機驅動學習





 工商網監
工商網監
評論