 機器人實時TCP速度輸出與寫屏方法步驟
機器人實時TCP速度輸出與寫屏方法步驟

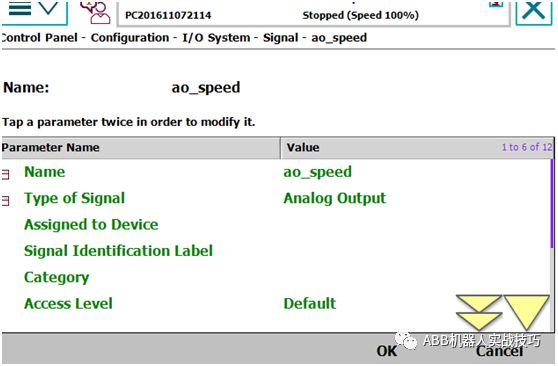
2)控制面板,配置,signal里新建模擬輸出如下(舉例為虛擬AO,也可以建立諸如DSQC651真實模擬輸出)
3)
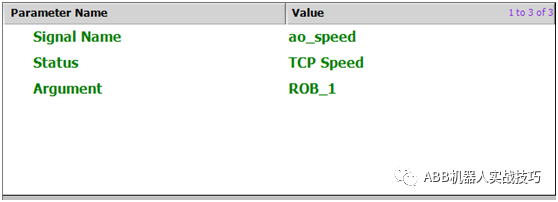
4)關聯次信號到系統輸出
5)在控制面板,配置的system ouput里新建,信號名為剛建立的模擬輸出,status選擇TCP Speed
6)
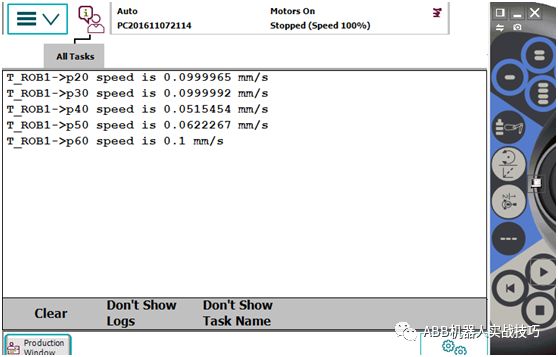
7)此時測試,可以通過模擬量ao_speed獲得機器人的實時tcp速度。在一些和機器人速度有關的工藝上可以使用該信號。
8)想在機器人運行到某些位置時,也實時寫屏速度,如何實現
9)可以通過MoveLSync語句來實現
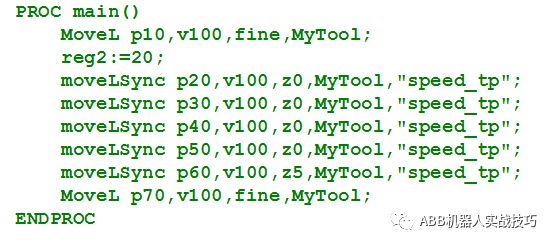
10)MoveLSync和MoveL語句相同,語句末加入機器人到達位置時調用的程序,該程序內不能有運動指令。如果使用zonedata,則機器人到達最接近設置位置時調用程序,類似triggerIO的提前距離為0.
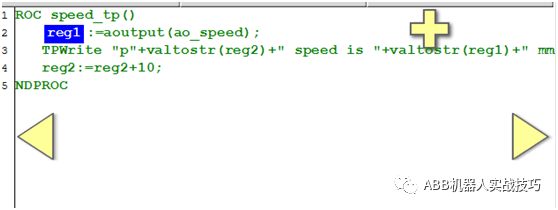
11)Speed_tp程序如下。即先獲得實時速度,然后寫屏。
12)
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29583瀏覽量
212045 -
TCP
+關注
關注
8文章
1399瀏覽量
80596
原文標題:機器人實時TCP速度輸出與寫屏
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
,一次生成深度信息。
自主機器人定位任務的本質是對機器人自身狀態的估計問題,包括位置,朝向,速度等問題。
路徑規劃旨在找到從起點到目標區域的路徑,確保路徑的可行性和最優性。路徑規劃方法
發表于 01-04 19:22
水下機器人便攜式遙控單元設計
電氣有限公司的EView MT4200型觸摸屏為例,分別介紹水下機器人水面遙控單元的硬件組成結構,單片機與觸摸屏之間的通信方法以及遙控單元軟件框架。
發表于 03-08 14:21
創意機器人的教程
://www.wifi-robots.com/thread-1258-1-1.html 【機器人創意工作室教程五】高級應用:驅動板程序的燒寫http://www.wifi-robots.com
發表于 10-11 17:41
工業機器人的基本結構
工具(如焊槍、噴嘴、機加工刀具、夾爪)與主構架的連接機構,它具有3個自由度。 驅動系統為機器人各運動部件提供力、力矩、速度、加速度。 測量系統用于機器人運動部件的位移、
發表于 01-19 10:36
機器人視覺——機器人的“眼睛”
為主,盡管機器人開始有搭載攝像頭的趨勢,但對視覺的理解仍然較低,往往需要有明顯的特征點作為輔助,同時抗干擾能力弱,對光照條件,部分遮擋等常見題目不能找到可靠的方法。 機器人技術對圖像理解的要求是迫切
發表于 01-23 15:02
美國機器人送快遞啦
兩個購物袋的貨物,運送時間范圍為5到30分鐘,因此此類機器人僅服務于小范圍快遞的運送。這樣可使用戶得到更精準的運送服務,使用手機呼叫運送服務后,20分鐘內貨物就能送至家門口。此外,在運送速度提高的同時
發表于 12-31 11:32
如何保障桁架機器人的安全
工作結束后用以停放機器人;4.低壓報警裝置:當氣源工作異常時,實時偵測并及時給予安全警示信號,提醒操作者迅速采取措施;5.誤操作保護裝置:監控機械臂運動速度,防止誤操作時機械臂快速上升或下降時引起意
發表于 09-29 12:08
焊縫跟蹤:自動化機器人實時焊縫跟蹤尋位
焊縫跟蹤:自動化機器人實時焊縫跟蹤尋位自動化機器人焊接過程中會出現工件夾偏、鈑金件熱變形、機器人焊接后再進行人工補焊等情況頻繁發生,非但沒有節省人工成本而且增長了產品返修率。自動化
發表于 04-19 10:48
如何實現移動機器人的設計?
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到
發表于 11-23 15:08
Profinet轉Modbus TCP網關連接搬運機器人配置案例
本案例是西門子1200PLC通過Profinet轉Modbus TCP網關連接搬運機器人配置案例,所需設備為西門子1200PLC,耐用通信技術Profinet轉ModbusTCP網關,搬運機器人
發表于 06-07 11:16
深刻理解機器人TCP
2017-06-21 16:00 發布于 技術干貨轉自:指南車機器人學院工業機器人使用的途徑就是要裝上工具(TOOL)來操作對象,那么如何描述工具在空間的位姿呢,顯然,方法就是在工具上綁定(定義)一
發表于 09-29 16:48
?3次下載
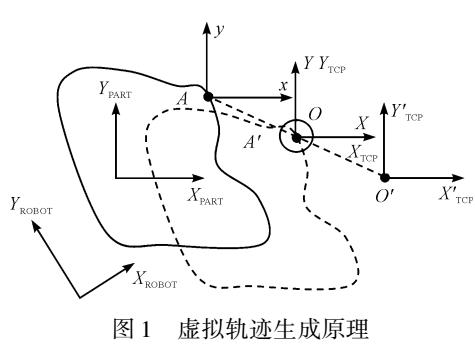
機器人虛擬TCP的設置及其在加工中的應用
針對機器人末端抓持工件時,無法利用生成在工件上的輪廓點進行去毛邊加工的問題,對機器人末端抓持工件在工具固定的情況下去毛邊加工的方法進行研究,提出在確定工件加工輪廓與機器人末端
發表于 03-08 09:27
?0次下載





 工商網監
工商網監
評論