") 挑戰(zhàn)具身機(jī)器人協(xié)同操作新高度!地瓜機(jī)器人邀你共戰(zhàn)CVPR 2025雙臂協(xié)作機(jī)器人競賽
挑戰(zhàn)具身機(jī)器人協(xié)同操作新高度!地瓜機(jī)器人邀你共戰(zhàn)CVPR 2025雙臂協(xié)作機(jī)器人競賽

引言
2025年6月,全球計(jì)算機(jī)視覺與人工智能領(lǐng)域的頂級盛會——CVPR(IEEE/CVF Conference on Computer Vision and Pattern Recognition)將重磅亮相,本屆會議聚焦“生成式人工智能時代的多智能體具身系統(tǒng)”,深入探討人工智能技術(shù)的前沿發(fā)展與應(yīng)用。作為CVPR協(xié)作智能workshop的核心賽事之一,RoboTwin雙臂協(xié)作競賽備受學(xué)界關(guān)注。
RoboTwin雙臂協(xié)作挑戰(zhàn)賽專注于雙臂機(jī)器人操作領(lǐng)域,將基于RoboTwin平臺進(jìn)行剛體操作以及觸覺操作兩個賽道的賽題評測,旨在通過仿真和實(shí)戰(zhàn)任務(wù)推動雙臂操作技術(shù)的前沿發(fā)展。本次競賽由上海交通大學(xué)、香港大學(xué)、地瓜機(jī)器人多家單位聯(lián)合主辦,地瓜機(jī)器人承擔(dān)了本次賽事中的基礎(chǔ)設(shè)施建設(shè)工作,為參賽團(tuán)隊(duì)提供了穩(wěn)定、高效、并行多卡的仿真評測平臺,最多可支持超百支隊(duì)伍實(shí)時在線PK各家的具身操作模型。
亮點(diǎn)速覽
難度升級,聚焦真實(shí)場景
競賽基于RoboTwin平臺,要求參賽者開發(fā)雙臂機(jī)器人控制策略,完成復(fù)雜物體操作任務(wù),如工具使用、物體交接、雙臂動作協(xié)調(diào)等。任務(wù)數(shù)據(jù)融合了真實(shí)遙操作數(shù)據(jù)與數(shù)字孿生生成的合成數(shù)據(jù),覆蓋多樣化場景,考驗(yàn)算法在模擬與真實(shí)環(huán)境間的泛化能力。
技術(shù)挑戰(zhàn):需解決雙臂運(yùn)動規(guī)劃中的動力學(xué)干擾、多模態(tài)感知融合、任務(wù)序列優(yōu)化等難題。
獎金豐厚,國際影響力加持
參與競賽的團(tuán)隊(duì)不僅獲得豐厚獎金,還將在CVPR Workshop現(xiàn)場展示成果,與全球頂尖學(xué)者、企業(yè)代表直接對話,提升技術(shù)影響力,優(yōu)秀團(tuán)隊(duì)還將有機(jī)會獲得張江集團(tuán)赴美參賽資助。
First Prize ($1500)
Second Prize ($1000)
Third Prize ($500)
突破限制,在線PK具身模型
本次競賽的模擬賽環(huán)節(jié)突破了傳統(tǒng)仿真框架強(qiáng)依賴顯示器及實(shí)體機(jī)環(huán)境的限制,地瓜機(jī)器人云平臺為參賽團(tuán)隊(duì)提供了穩(wěn)定、高效、并行多卡的仿真評測平臺,最多可支持超百支隊(duì)伍實(shí)時在線PK各家的具身操作模型。本次競賽的評測平臺在競賽后也將長期對外開放,地瓜機(jī)器人作為業(yè)內(nèi)領(lǐng)先的軟硬件機(jī)器人通用底座提供商,甘愿做好底層賦能,助力改善算法效果驗(yàn)證碎片化的現(xiàn)狀,加速具身智能的技術(shù)迭代。
參賽攻略
比賽內(nèi)容
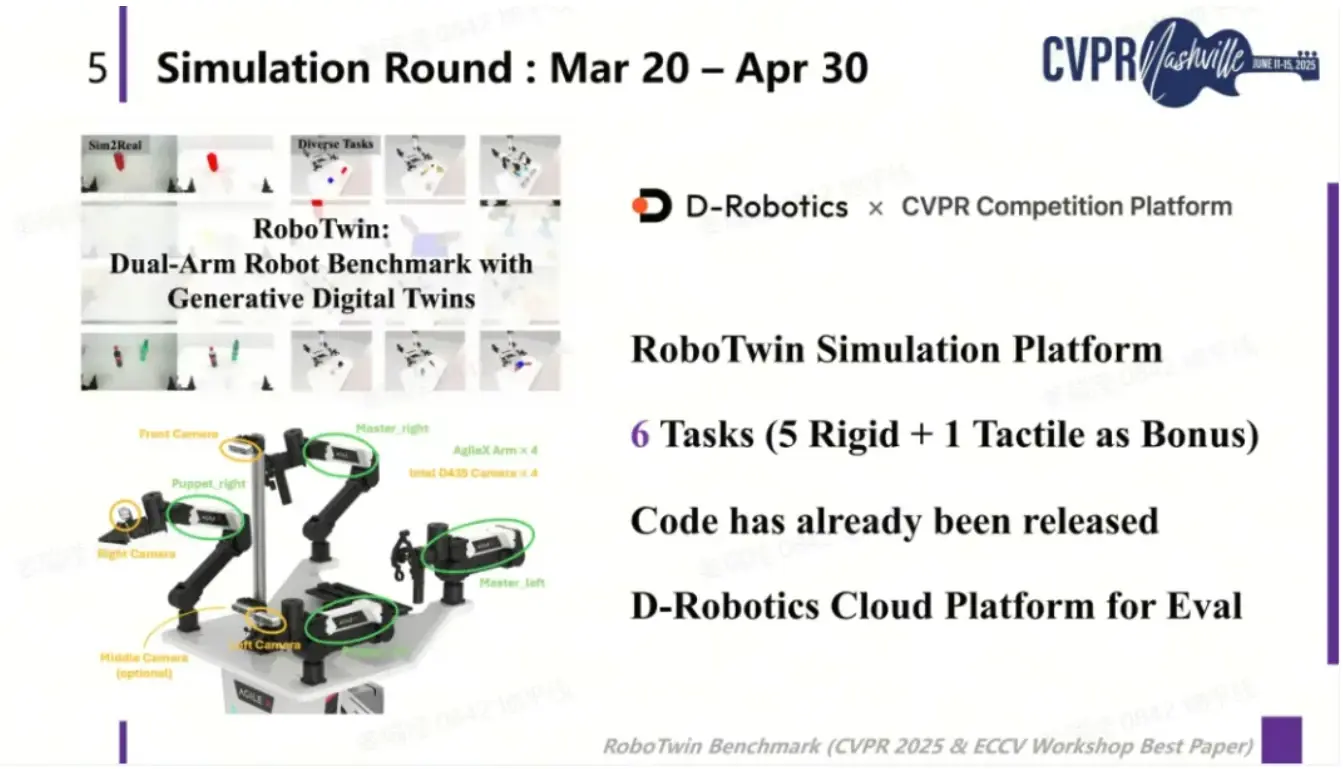
比賽采用RoboTwin仿真平臺和Cobot-Magic實(shí)體平臺,分為模擬賽和線下賽兩個階段,旨在解決模擬和現(xiàn)實(shí)世界環(huán)境中機(jī)器人操作的復(fù)雜性問題。模擬賽階段的剛性物體操作項(xiàng)目著重于對剛性對象的精確操縱,要求參與者開發(fā)算法,使機(jī)器人能夠以受控的方式掌握,移動和與剛性對象進(jìn)行交互。觸覺對象操縱賽道由于團(tuán)隊(duì)數(shù)量過多和后勤限制已取消報名,作為本次競賽的bonus項(xiàng)。
第一階段:模擬賽階段(2025年3月20日-4月30日)
- 5個剛性物體操作任務(wù),1個觸覺操作任務(wù)(作為加分項(xiàng))
- 任務(wù)包括:放置杯子、放置鞋子、堆疊碗碟、堆疊積木、投放瓶子等
第二階段:現(xiàn)實(shí)賽階段(2025年4月30日-6月11日)
- 僅模擬賽中排名前5的隊(duì)伍可進(jìn)入現(xiàn)實(shí)賽
- 現(xiàn)實(shí)賽任務(wù)將基于模擬賽任務(wù)設(shè)計(jì),但在真實(shí)環(huán)境中進(jìn)行
評分細(xì)則
1)模擬賽評分(總計(jì)100分)
- 放置杯子任務(wù)(10分):將杯子準(zhǔn)確放置在杯墊上
- 放置鞋子任務(wù)(20分):第一只鞋子成功放置得6分,第二只鞋子成功放置額外得14分
- 堆疊碗碟任務(wù)(20分):堆疊兩個碗得6分,堆疊第三個碗額外得14分
- 堆疊積木任務(wù)(25分):堆疊兩個積木得10分,堆疊第三個積木額外得15分
- 投放瓶子任務(wù)(25分):
- 成功投放全部三個瓶子得25分
- 成功投放兩個瓶子得12.5分
- 成功投放一個瓶子得5分
- 觸覺分類任務(wù)(5分額外加分):成功區(qū)分矩形體和25面棱柱
2)模擬賽評估方法
- 使用地瓜機(jī)器人云平臺自動進(jìn)行評估
- 每個任務(wù)進(jìn)行100次測試(觸覺任務(wù)10次),取平均分?jǐn)?shù)
- 實(shí)時更新排行榜,參賽團(tuán)隊(duì)可隨時查看排名
3)現(xiàn)實(shí)賽評分
- 與模擬賽基本一致,但在真實(shí)環(huán)境中執(zhí)行
- 額外考慮以下因素:
- 系統(tǒng)穩(wěn)定性(10分):在不同光照和物體位置變化下的表現(xiàn)
- 操作精度(10分):機(jī)器人抓取和放置的精確度
- 執(zhí)行效率(10分):完成任務(wù)所需的時間
- 系統(tǒng)魯棒性(10分):應(yīng)對干擾和不確定性的能力
- 代碼質(zhì)量(10分):代碼結(jié)構(gòu)、可讀性和可擴(kuò)展性
4)評分標(biāo)準(zhǔn)細(xì)則
- 成功標(biāo)準(zhǔn):
- 放置任務(wù):物體穩(wěn)定放置在目標(biāo)區(qū)域中心5cm范圍內(nèi)
- 堆疊任務(wù):上層物體與下層物體接觸面積≥60%且保持穩(wěn)定10秒
- 投放任務(wù):物體完全落入目標(biāo)容器內(nèi)部
- 時間限制:
- 每個任務(wù)有固定時間限制(90-120秒不等)
- 在時間限制內(nèi)完成任務(wù)的程度決定得分
- 失敗條件:
- 物體掉落或損壞
- 機(jī)器人與環(huán)境發(fā)生不安全碰撞
- 超出任務(wù)時間限制
5)代碼要求
- 必須為端到端策略:從感知到?jīng)Q策到執(zhí)行
- 不允許使用預(yù)設(shè)的硬編碼動作序列
- 所有代碼將被組織者審查,確保符合比賽規(guī)則
- 參賽團(tuán)隊(duì)需提交可重現(xiàn)的訓(xùn)練和評估代碼
- 系統(tǒng)應(yīng)能適應(yīng)初始位置和物體擺放的隨機(jī)變化
6)綜合評分計(jì)算
- 模擬賽總分 = 五項(xiàng)任務(wù)得分總和(100分)+ 觸覺任務(wù)加分(5分)
- 現(xiàn)實(shí)賽總分 = 任務(wù)完成度(100分)+ 系統(tǒng)性能評估(50分)
- 最終排名依據(jù)現(xiàn)實(shí)賽總分確定,模擬賽成績將作為參考
比賽日程
比賽階段
時間
報名開始
2025.3.20-2025.04.16
仿真平臺賽第一輪
2025.03.20-2025.04.30
晉級隊(duì)伍公布
2025.04.30
仿真平臺第二輪/現(xiàn)實(shí)賽開始
2025.04.30
真機(jī)評測賽代碼提交截止
2025.06.03
仿真平臺第二輪結(jié)束
2025.06.11
真機(jī)評測比賽
2025.06.11-2025.06.15
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29627瀏覽量
212226 -
人工智能
+關(guān)注
關(guān)注
1805文章
48913瀏覽量
248061 -
協(xié)作機(jī)器人
+關(guān)注
關(guān)注
2文章
512瀏覽量
30524 -
地瓜機(jī)器人
+關(guān)注
關(guān)注
0文章
25瀏覽量
74
發(fā)布評論請先 登錄
盤點(diǎn)#機(jī)器人開發(fā)平臺
大象機(jī)器人攜手進(jìn)迭時空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
樂聚機(jī)器人與地瓜機(jī)器人達(dá)成戰(zhàn)略合作,聯(lián)合發(fā)布Aelos Embodied具身智能

海伯森技術(shù)推動機(jī)器人感知能力邁向新高度
探索具身智能邊界,地瓜機(jī)器人邀你共戰(zhàn)ICRA 2025 Sim2Real挑戰(zhàn)賽

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
《具身智能機(jī)器人系統(tǒng)》第10-13章閱讀心得之具身智能機(jī)器人計(jì)算挑戰(zhàn)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.全書概覽與第一章學(xué)習(xí)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識與基礎(chǔ)模塊
地瓜機(jī)器人發(fā)布一系列通用機(jī)器人套件
地瓜機(jī)器人與廣和通深度合作,共驅(qū)智能機(jī)器人商用落地

地瓜機(jī)器人與廣和通深度合作,共驅(qū)智能機(jī)器人商用落地






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論