") 肇觀電子發(fā)布智能自主防護傳感器IOCAMERA-M1
肇觀電子發(fā)布智能自主防護傳感器IOCAMERA-M1
肇觀智能自主防護傳感器IOCAMERA-M1基于雙目主動光技術(shù),以抗強光干擾、多場景適配、RGB-D時空對齊、內(nèi)置避障算法直接輸出通行/減速/停車信號、不占用上位機算力為核心優(yōu)勢,助力移動機器人從室內(nèi)到室外,從低速到高速,無需上位機算力避障方案的全場景智能化升級;
傳統(tǒng)防護傳感器技術(shù)瓶頸
1.抗環(huán)境光干擾差:大多數(shù)視覺方案深度感知可能受到強光、反射表面等環(huán)境因素的干擾 ,導致深度識別錯誤;
2.多機協(xié)同干擾:大多數(shù)視覺方案在多傳感器并行工作時,因激光波長相同重疊易造成誤觸發(fā),導致高密度倉儲場景中多AGV集群避障失效。
3.利用上位機算力進行深度轉(zhuǎn)點云,占用上位機算力;點云算法優(yōu)化較為繁瑣。
肇觀智能自主防護傳感器IOCAMERA-M1技術(shù)方案:

(相機參數(shù)表)
肇觀智能自主防護傳感器IOCAMERA-M1采用主動雙目3D成像技術(shù),通過左右雙目的視差結(jié)合相機基線、焦距等成像參數(shù),基于三角測距原理計算出深度值;紅外散斑投射器投射散斑信息,用于做待測目標物的特征信息補充;
內(nèi)置避障算法與I/O接口:直接輸出通行/減速/停車信號,降低機器人系統(tǒng)集成復雜度,實現(xiàn)從“感知-決策-執(zhí)行”的毫秒級響應;
肇觀智能自主防護傳感器IOCAMERA-M1優(yōu)勢:
智能自主防護傳感器IOCAMERA-M1通過硬件觸發(fā)+軟件配置減速區(qū)/停車區(qū),實現(xiàn)了機器人系統(tǒng)的低延遲、高集成度、靈活控制; 特別適合對實時性和可靠性要求高的工業(yè)場景。
其優(yōu)勢在于可識別地面上5×5×5cm小物體、避免深度抖動產(chǎn)生的錯判誤判等問題;將“感知-決策-執(zhí)行”鏈條縮短至毫秒級,同時大幅降低終端處理系統(tǒng)復雜性和維護成本。
具體實現(xiàn):智能自主防護傳感器IOCAMERA-M1可通過設置界面規(guī)劃相機高度、俯仰角度、減速區(qū)、停車區(qū);
當無人設備裝配智能自主防護傳感器IOCAMERA-M1進入規(guī)劃區(qū)域時,智能自主防護傳感器IOCAMERA-M1將立即輸出前方障礙物信息(00通行,01減速,02停車)給到主機進行通行、減速或停車的決策;車體開始執(zhí)行減速或停車命令;
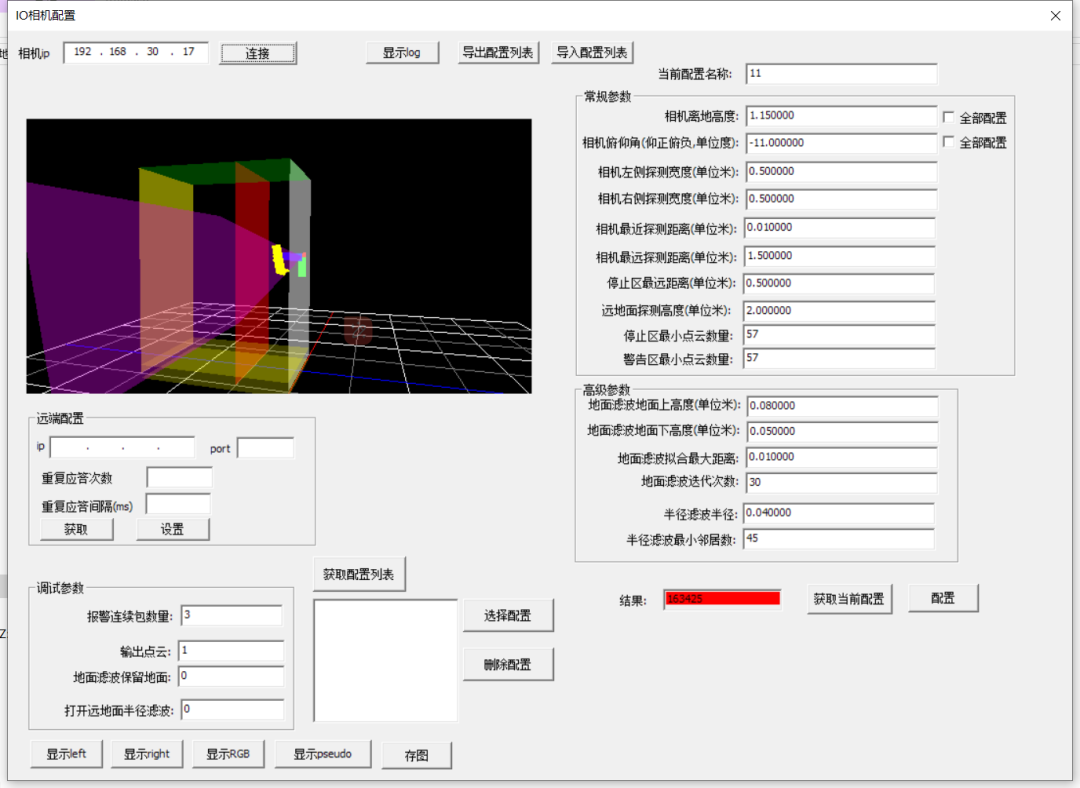
(智能自主防護傳感器IOCAMERA-M1設置界面)
智能自主防護傳感器IOCAMERA-M1提高了機器人的移動和避障效率,降低了機器人客戶的整機成本和運維成本,一經(jīng)推出,受到了機器人廠商的好評,收獲了諸多廠商的訂單并已經(jīng)在多款機器人型號里面常態(tài)化部署;
作為移動機器人3D視覺解決方案領先提供商,肇觀(NextVPU)自公司成立以來始終圍繞客戶需求和應用場景打磨3D視覺感知技術(shù),持續(xù)為移動機器人提供定位導航、自主避障、抓取引導、庫位檢測等3D視覺+AI解決方案,助力行業(yè)伙伴快速實現(xiàn)產(chǎn)品技術(shù)革新。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52665瀏覽量
764210 -
機器人
+關(guān)注
關(guān)注
213文章
29533瀏覽量
211731 -
肇觀電子
+關(guān)注
關(guān)注
0文章
17瀏覽量
2782
原文標題:肇觀電子推出適用與各類機器人的智能自主防護傳感器
文章出處:【微信號:肇觀電子NextVPU,微信公眾號:肇觀電子NextVPU】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
肇觀電子AI視覺芯片推動汽車智能化升級
肇觀電子兩款無人機視覺避障模組量產(chǎn)交付
肇觀電子持續(xù)推動汽車智能化升級
肇觀電子助力電子后視鏡產(chǎn)品通過GB15084認證
搭載32顆傳感器,尊界S800六大核心智能技術(shù)一覽






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論