 NVIDIA與光輪智能合作實現GR00T N1落地汽車工廠
NVIDIA與光輪智能合作實現GR00T N1落地汽車工廠

光輪智能成功將NVIDIA GR00T N1人形機器人基礎模型部署至汽車制造生產線,這一成果標志著具身智能在工業自動化領域的重大突破以及應用潛力。
此次部署,是 GR00T N1 人形機器人基礎模型在行業場景的首次應用實例。光輪智能合成數據技術在應用中發揮了關鍵作用,有效解決了具身智能訓練中的數據稀缺挑戰。兩者合作為具身智能進入智能制造樹立了新范式。
NVIDIA GR00T N1:
通用人形機器人技術的核心引擎
作為全球首個通用人形機器人開源基礎模型,GR00T N1 是此次合作的技術基礎。該模型能夠流暢處理文本指令與圖像等多模態輸入,輸出機器人動作指令,展現出跨實體、跨任務泛化能力。
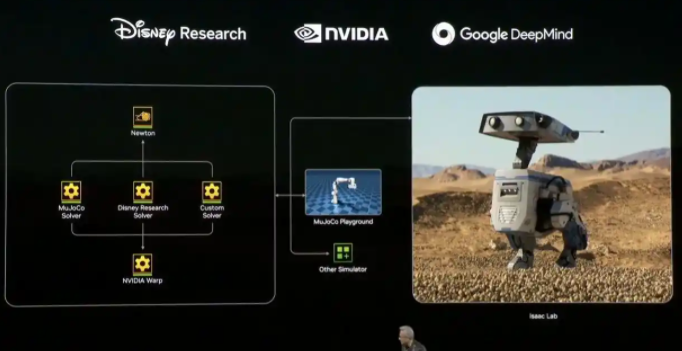
GR00T N1 的獨特優勢源于其創新的雙系統架構:視覺-語言模型系統負責環境理解和動作規劃,而 Diffusion Transformer 系統則將這些規劃無縫轉化為具體的機器人動作指令。這種受人類認知原理啟發的架構設計,使模型在后訓練階段實現協同優化,提升整體性能表現。
在訓練數據策略方面,GR00T N1 整合了海量互聯網視頻數據、真實機器人操作數據以及高質量合成數據,確保其在多樣化場景中的適應性與可靠性。其中,由光輪智能基于 Isaac Sim 與Omniverse平臺制作的仿真合成數據扮演著關鍵角色,通過高效并行方式調整場景材質、顏色、位置、角度、光照和環境參數,同時實現動作數據的有效泛化,從而使得模型在廣泛應用場景中展現適應性。
在實際應用中,GR00T N1 不僅能夠執行簡單的物體操作,還能勝任需要持續上下文理解和多技能整合的復雜任務,如多步驟玩具組裝、使用咖啡機、雙手使用托盤等任務。相較于傳統基線模型,GR00T N1 在仿真和現實基準測試中均表現出更高的成功率和更穩定的運動軌跡。
光輪智能基于合成數據技術,
加速 GR00T N1 落地汽車工廠
對于 GR00T N1 模型而言,核心挑戰體現在兩個方面:需同時支持多樣化任務類型,并適配不同機器人本體結構。單純依賴互聯網數據僅能獲取環境與任務的上下文信息,卻無法有效習得不同機器人本體的精確動作知識,這主要受限于互聯網數據中機器人本體多樣性不足且缺乏專業動作標注。另一方面,純粹使用真實機器人數據同樣存在局限性,因其在環境泛化方面表現不佳,無法像合成數據那樣輕松實現場景多樣化變換,難以從根本上解決模型泛化難題。
相比之下,仿真合成數據優勢顯著:不僅能夠借助 MimicGen 技術對動作軌跡數據進行有效泛化,還能在單位時間內實現更高效率的數據采集流程,因此這兩大挑戰需借助仿真合成數據的獨特優勢來克服。
光輪智能成功構建了物理交互真實、場景多樣化的仿真環境,模擬了汽車工廠中的復雜任務場景。基于“人在環”的仿真遙操作,生成了覆蓋各類任務的大規模遙操作合成數據,并將這些遙操數據遷移至不同機器人本體上,確保模型在各種機器人平臺上均能表現優秀。這些高質量合成數據不僅加速了 GR00T N1 基礎模型的訓練過程,還通過“Real2Sim2Real + Realism Validation”技術架構,有效縮小了仿真環境與物理現實世界的差距,確保訓練成果能夠順利遷移至真實應用場景,從而大幅提升模型在實際環境中的表現水平。
在汽車工廠中,搭載 GR00T N1 模型的人形機器人裝載通過質檢的零部件并批量搬運放置到精確位置的動作,展現了其在工業場景中的巨大潛力。
搭載 GR00T N1 的機器人在汽車工廠執行任務
經訓練后的機器人能夠通過視覺精確識別裝載框中的零部件以及質檢臺上的指定位置,完成抓取、搬運和放置的動作。其左右手協同操作能力不僅顯著提升了批量處理的工作效率和承重能力,更在整個搬運過程中保持穩定性,確保零部件安全、完整地抵達質檢臺。
這種高精度自動化操作優化了零部件質檢流程,提升了生產效率,有望降低質檢環節的運營成本。更為重要的是,機器人能夠替代人類在生產線上承擔的高重復性、高強度體力勞動任務,減輕了工人的工作負擔,創造了更為人性化的工作環境。
這些復雜工業任務的成功實施,有力證明了 GR00T N1 模型在多元化工業環境中的可靠性與適應性,而光輪智能提供的前沿合成數據解決方案無疑是推動這一突破的關鍵力量。
光輪智能:以合成數據技術,
破解具身智能基礎模型數據瓶頸
在具身智能領域,高質量訓練數據的稀缺性一直是制約技術突破的關鍵瓶頸。傳統數據采集方法不僅成本高昂,還耗時漫長,難以滿足現代人形機器人快速迭代優化的需求。基于 Isaac Sim,光輪智能采用創新的“Real2Sim2Real + Realism Validation”技術架構,構建物理特性精確、3D 視覺效果真實且高度可交互的數字資產與場景,涵蓋柔性資產、帶觸覺反饋的剛體資產、具備液體屬性的動態資產等,以及物理可交互工廠環境模擬。通過自動質檢、真實性評測標準和效用性評估流程,光輪智能對生成的訓練數據實施全方位質量管控。
光輪智能的合成數據解決方案還融入了真實人類專家示范,通過在高度真實的仿真場景中實施遙操作,系統采集包含真實人類示范的任務執行軌跡。基于 NVIDIA 強大的 Isaac Sim 仿真平臺,結合 MimicGen 和Cosmos技術,光輪智能成功生成了海量物理真實的訓練數據集,為 GR00T N1 模型的深度訓練提供了堅實的技術支撐。
這一突破性創新不僅在效果上超越純真實數據訓練方案,顯著提升了模型的智能水平和決策能力,更為下一代人形機器人在復雜多變的工業應用場景中發揮潛力奠定了扎實基礎。
光輪智能制作的帶物理交互能力的線纜仿真資產
未來展望:
進入具身智能場景落地時代
此次,NVIDIA 與光輪智能合作,成功實現 GR00T N1 在汽車工廠成功落地,僅是人形機器人技術廣泛應用的一個開端。隨著合成數據技術的不斷進步和 GR00T N1 模型的持續優化,人形機器人將在汽車制造、物流管理、質量檢測等領域發揮更大作用,推動全球產業智能化升級。
汽車工廠的成功首發只是起點。光輪智能將持續利用其合成數據技術優勢,借助 NVIDIA 技術生態,推動人形機器人技術的創新與家居、商超、物流等多樣場景落地,為全球產業智能化注入新的動力。
-
NVIDIA
+關注
關注
14文章
5299瀏覽量
106297 -
人形機器人
+關注
關注
7文章
732瀏覽量
17612 -
具身智能
+關注
關注
0文章
140瀏覽量
465
原文標題:光輪智能利用 NVIDIA GR00T N1 人形機器人模型落地汽車工廠生產應用
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

借助OpenUSD與合成數據推動人形機器人發展
NVIDIA Isaac GR00T 詳細解析
NVIDIA Isaac GR00T N1的特點和優勢

NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
NVIDIA發布全球首個開源人形機器人基礎模型Isaac GR00T N1
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型
深度解讀GR00T N1:英偉達開源人形機器人功能模型的技術革新與行業影響
NVIDIA 發布全球首個開源人形機器人基礎模型 Isaac GR00T N1——并推出加速機器人開發的仿真框架

智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案

NVIDIA發布Isaac GR00T Blueprint,加速人形機器人開發
NVIDIA推出Isaac GR00T Blueprint
NVIDIA發布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?






 工商網監
工商網監
評論