 NVIDIA Isaac GR00T 詳細解析
NVIDIA Isaac GR00T 詳細解析

NVIDIA Isaac GR00T 詳細解析
NVIDIA Isaac GR00T 是英偉達面向人形機器人開發的核心技術框架,旨在通過生成式AI、多模態數據融合和仿真技術加速機器人智能化進程。其核心包括 GR00T Blueprint(開發藍圖)和 GR00T N1(開源基礎模型)兩大模塊,結合硬件與生態支持,推動人形機器人從“任務專用”邁向“通用智能”。以下是詳細解析:
一、核心組件與技術架構
1. GR00T Blueprint
- 定位:開發工具鏈,用于生成合成數據與構建訓練流程。
- 核心功能:
2. GR00T N1 基礎模型
- 定位:首個開源通用人形機器人“大腦”,支持跨硬件適配。
- 技術架構:
3. 配套技術生態
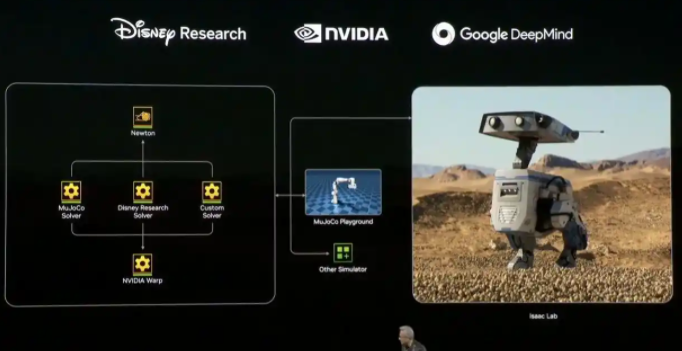
- 物理引擎Newton:與Google DeepMind、Disney聯合開發,支持高精度剛體/軟體模擬,兼容MuJoCo框架,仿真速度提升70倍。
- 硬件支持:
- Jetson Thor:專為人形機器人設計的SoC,集成GR00T模型推理能力。
- DGX Spark:個人AI超算,支持大規模模型訓練與微調。
二、技術突破與創新
生成式AI驅動
- 神經軌跡生成:利用視頻生成模型(如SOTA)創建符合物理規律的合成動作數據,解決極端場景數據匱乏問題。
- 世界基礎模型(WFM):通過Cosmos構建虛擬“宇宙”,模擬重力、碰撞等物理規則,提升機器人對現實世界的泛化理解。
端到端學習框架
- 流匹配(Flow Matching):統一多源數據的訓練損失函數,避免傳統強化學習的獎勵函數設計復雜性。
- 動作令牌(Action Token):從人類視頻中提取動作模式,結合逆動力學模型標注無監督數據,提升學習效率。
開源與模塊化
三、應用場景與案例
工業與物流
- 裝配與搬運:比亞迪工廠部署GR00T N1驅動的機械臂,揀選效率提升30%。
- 動態避障:凱傲集團AMR通過Isaac Perceptor實現360°障礙檢測,導航成功率超95%。
醫療與服務
- 手術機器人:GR00T-Mimic學習外科醫生動作,提升微創手術精度(誤差<0.1mm)。
- 護理機器人:Figure AI模擬醫院環境訓練機器人執行翻身、喂食等任務。
人形機器人開發
- 波士頓動力Atlas:結合GR00T Blueprint生成合成運動數據,實現復雜地形自適應行走。
- 1X NEO Gamma:通過GR00T N1后訓練,自主完成室內清潔、物品整理等多步驟任務。
四、未來發展方向
- 多模態能力增強:整合觸覺、聽覺等多傳感器數據,提升環境交互真實性。
- 仿真精度升級:引入光線追蹤與實時天氣系統,縮小虛擬與現實的“模擬差距”。
- 低功耗部署:優化Jetson系列芯片能效比,適配小型化人形機器人。
- 倫理與安全:開發安全約束模塊,防止動作越界與數據隱私泄露。
總結
NVIDIA Isaac GR00T 通過 生成式數據飛輪 與 雙系統架構,解決了人形機器人開發中的數據瓶頸與泛化難題。其開源策略與生態兼容性(如支持ROS 2、HuggingFace)正推動行業標準化,而跨硬件適配能力則加速了從實驗室到商業落地的進程。隨著Newton物理引擎與Cosmos平臺的持續迭代,GR00T有望成為通用機器人時代的“操作系統級”基礎設施。
如需進一步技術細節或代碼實踐,可參考:GR00T N1白皮書 或 GitHub倉庫 。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
發布評論請先 登錄
相關推薦
熱點推薦
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
在 COMPUTEX 2025 上,NVIDIA 宣布了機器人仿真參考應用 NVIDIA Isaac Sim 和機器人學習框架 NVIDIA Isa
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI
COMPUTEX —— 2025 年 5 月 19 日 —— NVIDIA 今日發布以下全新技術:NVIDIA Isaac GR00T N1.5,這是
發表于 05-19 17:53
?1069次閱讀

NVIDIA與光輪智能合作實現GR00T N1落地汽車工廠
光輪智能成功將 NVIDIA GR00T N1 人形機器人基礎模型部署至汽車制造生產線,這一成果標志著具身智能在工業自動化領域的重大突破以及應用潛力。
借助OpenUSD與合成數據推動人形機器人發展
適用于合成運動數據的 NVIDIA Isaac GR00T Blueprint 大幅加快人形機器人的數據生成和訓練速度。
NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
電子發燒友網報道(文 / 吳子鵬) 日前,在 NVIDIA 的 GTC 大會上,該公司發布了一系列助力人形機器人開發的重要方案,其中包括首個開源人形機器人基礎模型 Isaac GR00T N1
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
NVIDIA發布全球首個開源人形機器人基礎模型Isaac GR00T N1
NVIDIA 宣布推出一系列全新技術,助力人形機器人開發。其中包括全球首個開源且完全可定制的基礎模型NVIDIA Isaac GR00T N1,該模型可賦能通用人形機器人實現推理及各項
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型
GR00T N1以及新的數據生成和機器人學習框架,我們將共同開啟AI時代的新邊疆。” 黃仁勛還強調其泛化能力和多任務執行潛力?。 機器人Blue由英偉達公司、谷歌DeepMind、迪士尼聯合開發,行走動作流暢自然,聲音設計可愛,具備擬人化交互表現?很好。?機器人Blue基于共同打造的機器人研發平臺
深度解讀GR00T N1:英偉達開源人形機器人功能模型的技術革新與行業影響
GR00T N1 由 NVIDIA 推出,是全球首個開源且完全可定制的通用人形機器人基礎模型。其技術架構受人類認知原理啟發,采用 雙系統協同設計 在 NVIDIA ,我們正在開發 AI 解決方案,使
NVIDIA 發布全球首個開源人形機器人基礎模型 Isaac GR00T N1——并推出加速機器人開發的仿真框架
18 日 ——NVIDIA 今日宣布推出一系列全新技術,助力人形機器人開發。其中包括全球首個開源且完全可定制的基礎模型 NVIDIA Isaac GR00T N1,該模型可賦能通用人
發表于 03-19 09:30
?465次閱讀

智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案
Isaac GR00T 。 NVIDIA Isaac GR00T 加速仿真數采方案 模仿學習是機器人技術發展的關鍵方向之一,通過觀察和模仿

簡述NVIDIA Isaac的重要更新
在 2025 CES,NVIDIA 宣布了對NVIDIA Isaac的重要更新。NVIDIA Isaac 是一個由加速庫、應用框架和 AI

NVIDIA發布Isaac GR00T Blueprint,加速人形機器人開發
。 NVIDIA創始人兼首席執行官黃仁勛親自揭曉了NVIDIA Isaac GR00T Blueprint的發布。這一Blueprint旨在加速下一代人形機器人的開發進程,通過提供機器
NVIDIA推出Isaac GR00T Blueprint
用于合成數據的 Isaac GR00T 工作流以及 NVIDIA Cosmos 世界基礎模型,為通用人形機器人的開發注入強大動力。
NVIDIA發布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?
電子發燒友網報道(文/吳子鵬)在備受矚目的CES 2025上,NVIDIA在機器人領域宣布了重磅更新——Isaac GR00T Blueprint,幫助開發者更高效、高質量地打造人形機器人。同時






 工商網監
工商網監
評論