 固態激光雷達會是組合輔助駕駛的新寵嗎?
固態激光雷達會是組合輔助駕駛的新寵嗎?


前言
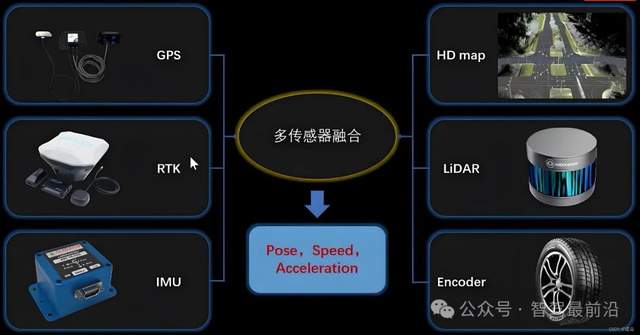
[首發于智駕最前沿微信公眾號]在華為ADS 4.0的發布會上,一條關于固態激光雷達的描述引起了人們注意。
固態激光雷達是ADS 4.0感知系統的重要組成部分,用于描述這一器件的優點的文字篇幅也明顯超過了對單一器件應該給于的篇幅,這些優點包括:
1、高精度探測:最小感知精度可達3cm,能夠精準檢測到下沉臺階、水管、石頭等多種障礙物,可識別懸空水管、地鎖等隱蔽障礙物,配合艙內激光視覺傳感器,能在100km/h 時速下檢測兒童玩具等小目標,實現零頓挫剎停,為車輛的安全行駛提供了有力保障。
2、尺寸小巧:其尺寸僅為45×50×44mm,體積約為傳統方案的1/3,便于集成安裝在車輛上,不會對車輛的空間和外觀設計產生過大影響,有利于車輛的整體造型和布局。
3、增強側向監測:采用“1 主雷達 + 3 固態雷達” 方案強化側向盲區監測,提升了車輛對側向環境的感知能力,有助于減少側向碰撞事故的發生。
4、提升安全冗余:作為全維防碰撞系統CAS 4.0 的一部分,實現了全時速、全方向、全目標、全天候的主動安全能力,與分布式毫米波雷達等傳感器協同工作,為車輛提供了全方位的安全防護。
所謂固態激光雷達,是指里面沒有旋轉的機械掃描裝置,所以可以做的更小,更耐久更結實,因為沒有太多的精巧結構可以損壞。它和傳統機械式激光雷達的區別,可以類比固態硬盤和機械硬盤的差別。
圖激光雷達是重要的車載感知器件,圖片來自網絡
固態雷達確實是比較新的事物,但并非ADS 4.0最先引入。之所以引起業界注意,是因為其應用前景廣闊。

關鍵原理對比
機械式激光雷達需要帶動反射鏡旋轉掃描,靠接收反射光來測定目標的距離、方位和反射強度。
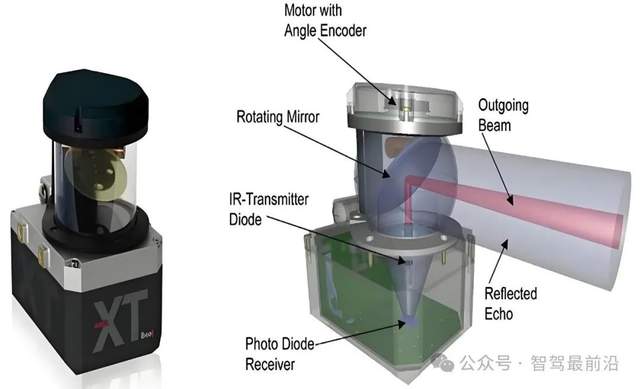
圖機械式激光雷達原理圖,圖片來自網絡
每一個反射點信號都是四元組(x,y,z,q),xyz是三維坐標,q代表反射強度。
激光雷達是可以識別車道線的,即使車道線是用白漆刷在馬路上的,在xyz坐標上與路面無異,但是車道線表面的反射強度和路面不一樣,所以可以識別車道線。

圖車展現場激光雷達點云的實時效果,圖片來自網絡

圖激光雷達看路面,圖片來自網絡
Lidar系統通過發射激光束,然后測量激光從發射到被目標反射回來的時間,來計算出目標與 Lidar 設備之間的距離等信息。每次激光脈沖發射和接收的過程,就對應著一個點的測量和生成。由于 Lidar 每秒會發射大量的激光脈沖,所以能快速生成大量的點,這些點共同構成了點云數據,用于描述目標物體或場景的三維信息。例如,一些用于自動駕駛的 Lidar 傳感器,每秒可能會發射數十萬個激光脈沖,也就意味著每秒能生成數十萬個點。
一些常見的機械式激光雷達中,如速騰聚創的Helios系列,其電機轉速有300rpm、600rpm和 1200rpm 三檔,分別對應 5Hz、10Hz 和 20Hz 的幀率。這意味著電機每旋轉一圈,就會掃描一次環境并輸出一幀點云數據(一圈就是一幀)。再如奧迪 A8 的4線束激光雷達,其旋轉鏡由電機驅動,轉速約為 700r/min,水平探測范圍約 145°,可實現較好的環境感知。
一般來說,電機轉速越快,激光雷達的掃描速度就越快,輸出點云的速度也越快,能更及時地獲取周圍環境的信息,對于快速移動的目標或復雜環境的監測更有利。但轉速的提升也會受到激光發射和接收模塊的性能、數據處理能力以及功耗等因素的限制。
激光雷達的“線” 指的是激光雷達在垂直方向上能夠發射和接收激光脈沖的激光線數量。
激光雷達通過發射激光脈沖并測量反射光來檢測距離等信息。線數越多,通常意味著垂直方向上的激光束越多,能獲取的環境信息就越豐富,點云分辨率也越高,成像更清晰。例如,128線激光雷達形成的點云圖能清晰分辨 200 米外車輛輪胎紋理,而 16 線雷達僅能勾勒出模糊輪廓。
對于360° 旋轉式和一維轉鏡式架構的激光雷達,線數等同于激光雷達內部激光器的數量。
LiDAR每秒產生點的數量與線數、轉數、水平視場角、水平角分辨率等因素有關。一幀點云包含的點的個數計算公式為:水平視場角 水平角分辨率)* 線束數。而每秒產生的點數 = 一幀點云包含的點的個數 × 幀率(轉數)。
例如,對于一個360° 視場角、64 線、10Hz (一秒十圈)的激光雷達,水平角分辨率假設為 0.1°,那么一幀點云包含的點數為360 0.1*64 = 230400個,每秒產生的點數則為230400*10 = 2304000個
激光雷達要看周圍環境,是非掃描不可的,不掃描除非在360°全方位都裝上激光器發射頭和反射鏡,但是這個成本是無法承受的。
而固態激光雷達沒有旋轉,又不是在360°全方位都裝上發射頭和反射鏡,那么如何實現掃描呢?
回答是只要能改變激光速的方向即可,不一定是通過旋轉來改變方向。
固態激光雷達能夠不用旋轉的根本原因是其采用了非機械旋轉的掃描技術,通過電子部件或光學原理來控制激光的發射角度和掃描方向,主要包括以下幾種技術方式:
光學相控陣技術:利用光學相控陣列,通過調節發射陣列中各個發射單元的相位差,來改變激光的出射角度,實現光束的指向掃描。這種方式基于電信號對相位的嚴格控制,可稱為電子掃描技術,完全摒棄了機械結構,掃描速度快,精度高,能在短時間內對不同方向進行快速掃描。
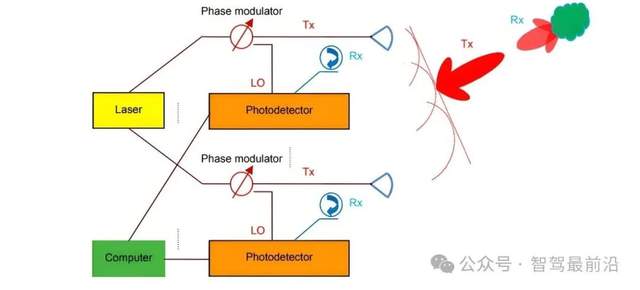
圖光學相控陣激光雷達示意圖,圖片【1】
Flash 技術:Flash 固態激光雷達是一種非掃描式雷達,它通過短時間內直接發射出一大片覆蓋探測區域的激光,再利用高度靈敏的接收器來完成對環境周圍圖像的繪制,無需通過機械旋轉或掃描部件來改變激光的發射方向,而是一次性獲取整個視場的信息。
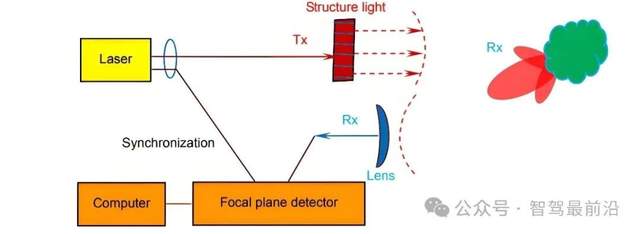
圖Flash激光雷達示意圖,圖片來自【1】
Flash激光雷達取FLash的名字,是因為它工作時會短時間內直接發射出一大片覆蓋探測區域的激光,就像閃光一樣,快速照亮目標場景,再利用高度靈敏的接收器來完成對環境周圍圖像的繪制,一次性獲取整個視場的信息 ,而不是像機械式激光雷達那樣通過旋轉等方式逐點掃描。如果要類比,可以類比照相機曝光。
lMEMS 技術:基于 MEMS 的固態激光雷達利用微振鏡來改變單個發射器的發射角度進行掃描,通過懸臂梁在橫縱兩軸的高速周期運動,改變激光的反射方向,從而形成面陣掃描視場。雖然 MEMS 技術中存在微小的機械運動部件,但與傳統機械式激光雷達的大型旋轉部件相比,其結構得到了極大簡化,體積更小,可靠性更高。
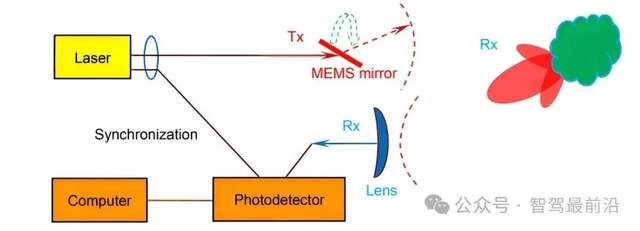
圖MEMS激光雷達示意圖,圖片來【1】
下面以光學相控陣激光雷達為例:
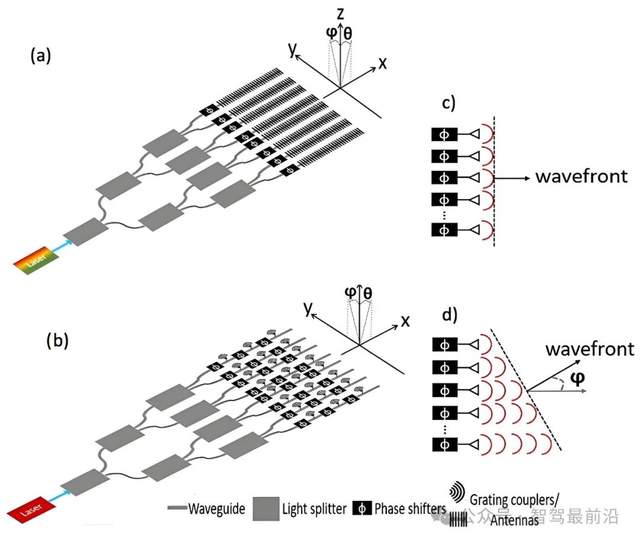
圖光學相控陣(OPA)固態激光雷達的詳細原理圖,圖片來自網絡
光學相控陣(OPA)的原理和結構,具體解釋如下:
圖中包含如下組件:
Waveguide(波導):圖中灰色線條,用于引導光的傳播路徑。
Light splitter(分光器):灰色矩形塊,作用是將輸入光分成多路,使光能夠進入不同的通道。
Phase shifters(移相器):黑色方塊標注“φ” ,通過調節電信號改變光的相位。
Grating couplers/Antennas(光柵耦合器/ 天線):負責將波導中的光耦合輸出,發射到自由空間中。
各子圖內容羅列如下:
圖(a):左側激光源(Laser)發出光,經波導傳輸,由分光器將光分成多路,每路光經過移相器后,由光柵耦合器 / 天線發射出去。圖中展示了光在光學相控陣中的傳輸路徑,通過坐標軸(x、y、z)及角度(φ、θ)表示光的出射方向。
圖(b):與圖 (a) 類似,同樣是激光源發出光,經分光器分路、移相器調節相位后由光柵耦合器 / 天線發射。但與圖 (a) 的光出射方向有所不同,體現了通過移相器改變光相位進而改變出射角度的原理。
圖(c):展示了一維光學相控陣中波前(wavefront)的情況。多個發射單元(標注 φ 的三角形)發出的光形成平面波前,通過控制各單元相位可控制波前方向。
圖(d):同樣是關于波前的示意圖,展示了通過調節發射單元相位,使波前產生傾斜,改變光的傳播方向(以角度 φ 表示),體現光學相控陣掃描光束的原理。
光學相控陣激光雷達原理有點像老式旋轉天線雷達到相控陣雷達的改變,畢竟光也是一種波長極短的無線電波罷了。

固態激光雷達的發展和上車應用
固態激光雷達作為自動駕駛新興核心傳感器,近年來在技術迭代和商業化應用上取得顯著進展。以下是其發展歷程、技術路線及上車應用的分析:
1、技術發展歷程與現狀
技術演進路徑從機械式→半固態→全固態:激光雷達從早期機械旋轉式(體積大、成本高)逐步向無運動部件的純固態過渡,提升可靠性和量產能力。
主流固態技術路線
Flash激光雷達:通過面陣激光一次性照射場景,適合補盲應用,但受限于SPAD探測器量產進度,成本較高。
OPA(光學相控陣):通過電控相位調整光束方向,無需機械掃描,但技術成熟度較低,光作為一種波長超短的電磁波,要控制其相互干涉不容易。
而MEMS技術在半固態激光雷達中用的比較多。
半固態是指部分結構固定,部分采用可運動部件,不像機械式激光雷達通過整體機械旋轉掃描,也不像固態激光雷達完全無機械運動部件。比如,它可能使用一個或幾個旋轉的鏡片(如MEMS 微鏡、轉鏡、棱鏡 )來改變激光束方向實現掃描 。結合固定部件與動態部件進行一維或二維掃描 。如 MEMS 半固態激光雷達靠微鏡在橫縱兩軸高速周期運動改變激光反射方向;一維掃描型通常用僅在水平方向低速轉動的反射鏡改變光線方向 。相比機械式,體積更小、成本更低、可靠性更高,易集成到車輛等設備;與固態比,雖有運動部件,但在性能和成本間達到較好平衡,是當下量產車等應用的主流選擇。
目前關鍵技術突破
小型化:Flash激光雷達從“車廂級”縮小至“厘米級”,得益于激光器與探測器陣列集成。
芯片化:SPAD(單光子雪崩二極管)和SoC(系統級芯片)國產化推動成本下降,可以參考【2】和【3】。
以下我們列舉一些國內使用固態激光雷達做輔助駕駛的案列,因為這些案例引述原始報道,使用了自動駕駛字眼(比如華為智駕),本文仍然沿用它們自動駕駛的叫法:
滴滴自動駕駛與RoboSense 速騰聚創合作方案:RoboSense 速騰聚創與滴滴自動駕駛達成合作,雙方基于 RoboSense 的全固態數字化激光雷達 E1,圍繞滴滴自動駕駛與廣汽埃安合作的首款 L4 Robotaxi 車型開展工作。E1代表了激光雷達數字化的重要進展,率先且迄今為止唯一實現了 SPAD - SoC 芯片自研量產,還突破了二維可尋址 VCSEL 技術等,沒有任何運動部件,能滿足各類場景需求。參考【4】
RoboSense 速騰聚創 RS - Fusion - P6 方案:這是 RoboSense 推出的首款面向 L4 自動駕駛的車規級固態激光雷達感知解決方案。它完美融合了基于二維 MEMS 掃描技術的硬件和基于人工智能技術的軟件,具備靈活可擴展性,適用于多種自動駕駛應用。該方案采用四顆 M - series 固態激光雷達,可實現 360 度水平范圍的智能感知,能檢測 200 米外的交通狀況,并快速處理數據,為自動駕駛控制中心提供反饋。參考【5】
禾賽科技“千厘眼” 感知方案:禾賽科技在 2025 年上海車展前夕發布 “千厘眼” 感知方案,涵蓋 L2 至 L4 級智能駕駛需求。其中面向 L4 級自動駕駛系統的 “千厘眼 A” 方案,包含 4 顆超高清 AT1440 以及 4 顆純固態 FTX 激光雷達。該方案遠距近距兼備,全視野無盲區,以業界最高線數的超高性能激光雷達實現 360° 全覆蓋,可實現厘米級小目標探測能力,滿足 L4 自動駕駛應用如 Robotaxi、Robotruck 等高速行駛所需的全向高清感知。參考【6】
華為乾崑智駕ADS 4 方案:華為乾崑智駕 ADS 4 采用全新的 WEWA 架構,通過云端 AI 生成難例擴散模型,結合車端高精度固態激光雷達、艙內激光視覺傳感器等新型感知模組,實現端到端時延降低 50%、通行效率提升 20%、緊急制動率下降 30% 的突破性進展。其 Ultra 旗艦版支持高速 L3、泊車代駕及全場景智能輔助駕駛,通過全維防碰撞系統 CAS 4.0、首發量產高精度固態激光雷達(最小精度 3cm)及分布式毫米波雷達,實現了全時速、全方向、全目標、全天候的主動安全能力。參考【7】
小馬智行第七代車規級自動駕駛系統:小馬智行2025 年上海車展發布的第七代車規級自動駕駛系統,是全球首個基于車規級芯片實現 L4 級全場景無人駕駛能力的方案,采用 100% 車規級零部件,覆蓋固態激光雷達、英偉達 Orin - X 芯片等關鍵組件,設計壽命長達 10 年 60 萬公里。同時基于 PonyWorld 世界模型技術,L4 級 Robotaxi 車隊已實現 50 萬小時全場景、全無人運營,安全性更高。參考【8】

目前最小的固態激光雷達

圖索尼AS-DT1微型LiDAR,圖片來自【9】
索尼AS-DT1微型LiDAR深度傳感器宣傳是嵌入式Lidar,但屬于固態雷達(Solid-State LiDAR)。
AS-DT1采用直接飛行時間(dToF)技術,并搭載單光子雪崩二極管(SPAD)傳感器模塊。固態雷達的核心特征是無機械運動部件,依賴半導體技術實現光束控制,而dToF+SPAD的組合正是典型的固態方案。
尺寸與重量:僅29×29×31mm(比華為ADS4.0的固態激光雷達45×50×44mm還要小的多)、50克,為全球最小最輕的LiDAR傳感器。這種極致小型化依賴索尼的光學鏡頭集成技術和堆棧式SPAD設計。
應用場景:面向無人機、機器人、輔助駕駛汽車等對體積敏感的領域,需高度可靠的固態方案。汽車雖大,但對Lidar體積敏感的場景很常見,比如家用轎車的側面補盲,經常裝在B柱上,而B柱的寬度和厚度十分有限。還有港口無人集卡,在吊裝集裝箱時需要準確對位,對位用的1線激光雷達是裝在集裝箱卡車側面新增的一個小支撐柱上(這樣就不用改動車體),這是筆者在廈門港無人集卡項目的實際經歷。
索尼AS-DT1通過dToF+SPAD技術、無機械結構設計和超小型化封裝,符合固態雷達的技術標準,是當前固LiDAR領域的前沿產品。其發布也反映了行業向嵌入式、芯片級解決方案發展的趨勢。

總結
根據報告【10】,預計2030年全球固態激光雷達市場將超240億美元,年復合增長率約30%。后續技術融合,多傳感器融合(攝像頭+雷達)與4D點云成像成為發展方向。而且固態激光雷達除了體積小重量輕外,還有價格優勢。固態激光雷達與機械激光雷達在價格上存在顯著差異,以下是詳細對比分析:
1.價格區間對比
| 類型 | 價格范圍 | 典型產品示例 |
| 機械式激光雷達 | 8,000 - 80,000美元 | Velodyne 64線(8萬美元)、32線(2萬美元) |
| 半固態激光雷達 | 500 - 1,000美元 | 禾賽AT128(500美元)、覽沃HAP(轉鏡式) |
| 全固態激光雷達 | 800美元以下(新興低成本方案) | 低端固態雷達(如研究用方案) |
2. 成本差異原因
機械式雷達:依賴旋轉部件和復雜光學結構,芯片組成本高(如16組芯片成本達3,200美元),且體積大、量產難度高。
固態雷達:采用MEMS微振鏡或Flash等芯片化方案,集成度高,生產成本大幅降低(約機械式的1/10)。
但是固態激光雷達也存在挑戰和不足:
| 挑戰 | 應對方向 |
| 高成本(SPAD量產難) | 推進芯片國產化與規模化生產 |
| 探測距離與分辨率平衡 | 開發高靈敏度探測器(如dToF技術) |
| 車規級可靠性驗證 | 優化散熱、防塵等集成系統設計 |
而且固態激光雷達相比機械激光雷達還有些劣勢:
1.探測距離和分辨率
探測距離較短:固態激光雷達的探測距離通常較短,一般在幾百米范圍內,而機械激光雷達可以實現更遠的探測距離(如100米以上)。
分辨率較低:固態激光雷達的分辨率通常不如機械激光雷達,尤其是在遠距離探測時,其點云密度和細節表現較差。
2.視場角(FOV)限制
視場角較小:固態激光雷達的視場角通常較窄,難以實現360°全景掃描,而機械激光雷達可以通過旋轉部件實現大范圍掃描。
動態目標檢測受限:窄視場角可能導致對快速移動目標的跟蹤能力不足。
3.環境適應性
抗干擾能力較弱:固態激光雷達的接收面較大,容易引入環境光噪聲,影響信噪比和掃描精度。
極端氣候性能差:在雨雪、霧霾等極端天氣條件下,固態激光雷達的性能可能顯著下降。
4.技術成熟度
量產難度高:部分固態技術(如OPA、Flash)仍處于發展階段,存在可量產性、精度和可靠性問題。
掃描頻率低:固態方案的掃描頻率可能低于機械式,影響實時性。
5.成本與性能權衡
低成本犧牲精度:部分固態方案通過降低線束或簡化結構來壓縮成本,但可能導致性能妥協。
對比表格如下:
| 劣勢項 | 固態激光雷達 | 機械激光雷達 |
| 探測距離 | 較短(通常<300米) | 較遠(可達100米以上) |
| 分辨率 | 較低,遠距離細節少 | 較高,點云密集 |
| 視場角 | 窄(通常<120°) | 360°全景掃描 |
| 環境抗干擾 | 易受環境光影響 | 抗干擾能力較強 |
| 極端氣候適應性 | 性能下降明顯 | 相對穩定 |
| 技術成熟度 | 部分技術未成熟 | 成熟度高 |
總的來說,固態激光雷達在可靠性、體積和成本上具有優勢,沒有那么多需要物理運動的結構,但短期內仍需克服探測距離、分辨率和環境適應性等技術瓶頸。機械激光雷達則在性能上更勝一籌,適合高精度需求場景。
所以固態激光雷達上車,往往是先作為補盲雷達。
但是華為乾崑智駕ADS 4 的 Ultra 旗艦版中,高精度固態激光雷達是主要雷達,而非單純的補盲雷達。
據報道,這種高精度固態激光雷達最小精度達3cm,最遠探測距離 250 米,垂直方向大 FOV 視角實現全方向感知覆蓋,不僅能精準識別各類障礙物、還原物理世界,還與艙內激光視覺傳感器、分布式毫米波雷達等協同構成全維防碰撞系統 CAS 4.0,在高速 L3全場景智能輔助駕駛等功能中發揮核心感知作用 ,是智駕系統的主要雷達。它也是ADS 4創新性和先進性的來源之一。
參考文獻
[1] 陳敬業,時堯成. 固態激光雷達研究進展[J]. 光電工程,2019,46(7): 190218
[2] 2025年中國車載激光雷達行業現狀分析及發展趨勢預測
https://www.laserfair.com/news/202504/18/88129.html
[3] 激光雷達研究:性能提升、成本下沉、應用拓展,迎接爆發增長
https://zhuanlan.zhihu.com/p/32864414454
[4] 搭載6顆全固態數字化激光雷達,RoboSense與滴滴自動駕駛達成重要合作 2025-05-04 00:0119》
https://www.sohu.com/a/891757093_121124378
[5] RoboSense發布首款車規級固態激光雷達L4感知融合方案
https://m.autor.com.cn/app.jspx?id=17276&template=info
[6] 禾賽科技發布感知方案「千厘眼」,覆蓋L2到L4級別的智駕需求|最前線 2025-05-01 17:04·36氪
https://36kr.com/p/3261061655969923
[7] 從3.0到4.0 華為ADS有哪些變化?
https://mp.weixin.qq.com/s/f79RA42h7EY9OFI1PbfdhQ
[8] 小馬智行與Uber達成戰略合作:為自動駕駛全球化落地提供“中國樣板間” 2025-05-06 18:09·21世紀經濟報道
https://www.sohu.com/a/892494582_121255906
[9] Sony's AS-DT1 and the Shift Toward Embedded Lidar | In the Scan2025-4-18 https://blog.lidarnews.com/sonys-as-dt1-and-the-shift-toward-embedded-lidar
[10] 《Solid-State LiDAR Market Size, Share & Trends Analysis Report By Type (MEMS-Based Scanning, Optical Phased Arrays, Flash LiDAR), By Application (Intelligent Machine Vision and Robotics, Assisted Surgery, Air Quality Monitoring, Aerial Drones, Autonomous Vehicles, Automation of Factory Robots) and By Region(North America, Europe, APAC, Middle East and Africa, LATAM) Forecasts, 2025-2033》
https://straitsresearch.com/report/solid-state-lidar-market/
-
輔助駕駛
+關注
關注
1文章
277瀏覽量
15428 -
自動駕駛
+關注
關注
788文章
14292瀏覽量
170414 -
LIDAR
+關注
關注
10文章
349瀏覽量
30309 -
固態激光雷達
+關注
關注
0文章
46瀏覽量
6484
發布評論請先 登錄
自動駕駛只用激光雷達進行感知會有哪些問題?
機械、半固態、全固態激光雷達有何區別?誰更適合自動駕駛?

激光雷達在自動駕駛領域中的優勢

激光雷達三大新品首發!L2/L3全域感知,激光雷達廠商圖達通重塑性能標桿

激光雷達技術:自動駕駛的應用與發展趨勢

DeepSeek:2025年激光雷達技術與行業應用趨勢

一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
科普:一文了解固態和半固態激光雷達
Mobileye牽手Innoviz合作激光雷達用于其Mobile Drive平臺
智能駕駛浪潮下,車載激光雷達行業深度剖析與未來展望
激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達技術的發展趨勢
激光雷達在自動駕駛中的應用
物聯網系統中的自動駕駛的“眼睛”_純固態激光雷達






 工商網監
工商網監
評論