 MT6835 的協作機器人高精度實時控制應用
MT6835 的協作機器人高精度實時控制應用
摘要
隨著智能制造領域對協作機器人的精度與實時性要求日益嚴苛,高性能芯片的應用成為突破技術瓶頸的關鍵。本文聚焦 MT6835 芯片在協作機器人高精度實時控制中的應用,詳細分析其硬件架構與軟件算法的適配性,結合具體工業場景,展示 MT6835 如何實現對協作機器人的精準、高效控制,為協作機器人的技術升級提供參考。
MT6835磁編嗎器IC
一、引言
協作機器人憑借其靈活性、安全性與易用性,在工業生產、醫療康復、服務等領域得到廣泛應用。然而,在精密裝配、手術輔助等高要求場景中,對機器人控制的精度與實時性提出了極高標準。傳統控制方案在處理復雜算法與大量數據時,常出現響應延遲、控制精度不足等問題。MT6835作為一款高性能芯片,具備多核處理器、高速數據處理能力以及豐富的接口資源,為協作機器人高精度實時控制提供了新的解決方案。
二、MT6835 芯片特性與協作機器人控制需求的契合
2.1 MT6835 芯片核心特性
MT6835 芯片采用先進的多核異構架構,集成多個高性能 CPU 核心與 GPU 核心,能夠并行處理復雜的控制算法與傳感器數據。其具備高速的數據處理能力,可快速完成機器人運動學、動力學計算,減少控制延遲。同時,芯片擁有豐富的外設接口,如 SPI、I2C、CAN 等,便于連接多種傳感器與執行機構,滿足協作機器人對多源數據采集與控制信號輸出的需求 。
2.2 協作機器人高精度實時控制需求分析
協作機器人的高精度實時控制需要滿足以下關鍵需求:快速的傳感器數據采集與處理,以實時感知工作環境與自身狀態;高效的運動控制算法執行,確保機器人按照預定軌跡精準運動;及時的反饋調節,根據實際運行狀態修正控制指令。MT6835 芯片的特性與這些需求高度契合,為實現高精度實時控制奠定了基礎。
三、基于 MT6835 的協作機器人高精度實時控制架構設計
3.1 硬件架構設計
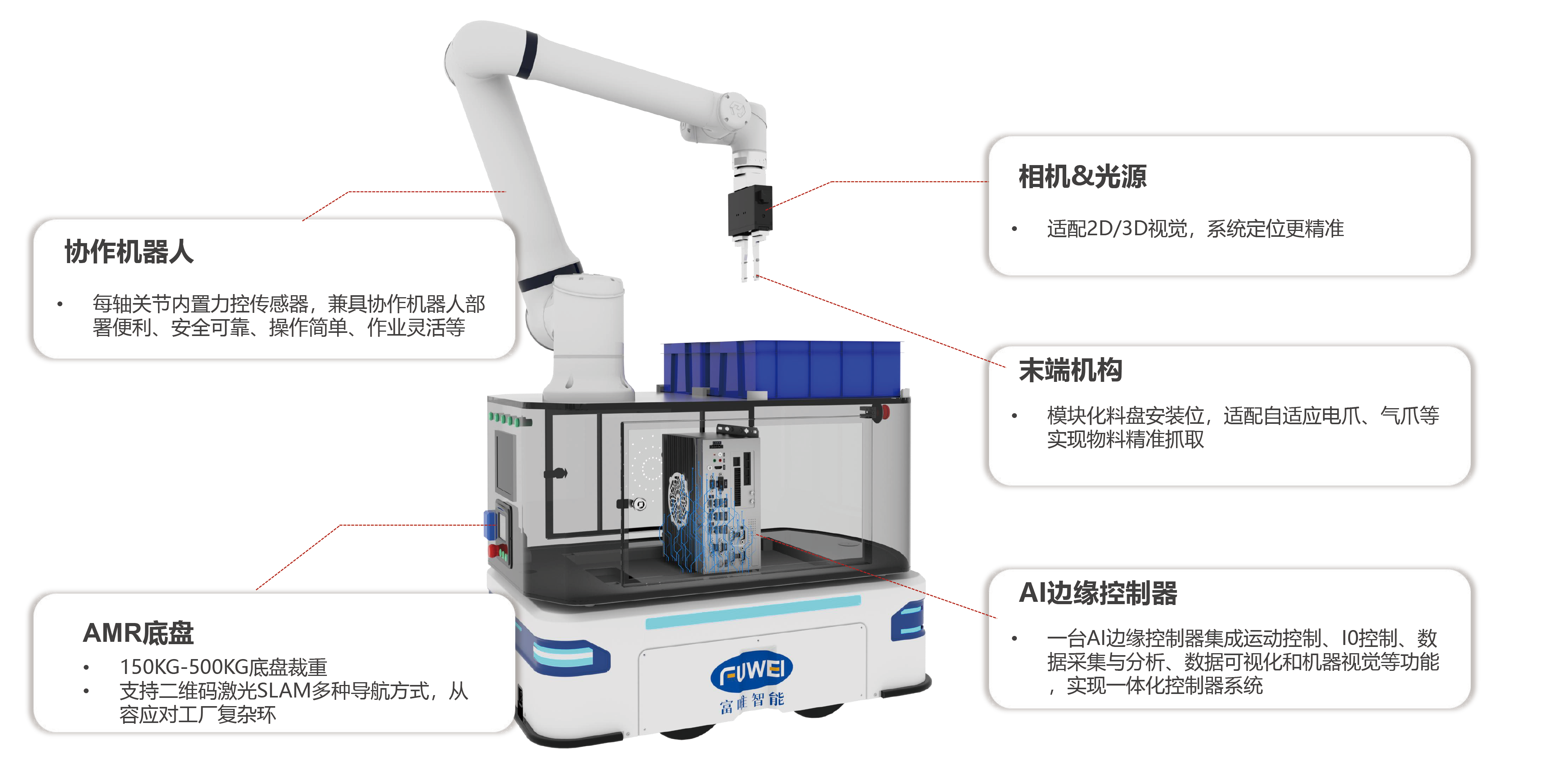
基于 MT6835 的協作機器人硬件架構主要包括傳感器模塊、MT6835 主控模塊、驅動模塊與執行機構。傳感器模塊涵蓋力傳感器、視覺傳感器、編碼器等,用于采集機器人的力信息、環境圖像以及關節角度等數據。MT6835 主控模塊作為核心,通過高速接口接收傳感器數據,運行控制算法,并將計算后的控制指令發送至驅動模塊。驅動模塊根據指令驅動執行機構,實現機器人的運動。
3.2 軟件架構設計
軟件架構采用分層設計理念,分為底層驅動層、中間算法層與上層應用層。底層驅動層負責與硬件設備交互,實現傳感器數據采集與驅動模塊控制;中間算法層集成運動學正逆解、軌跡規劃、力控制等算法,是實現高精度實時控制的核心;上層應用層提供人機交互界面,方便用戶進行任務規劃與參數設置。
四、MT6835 在協作機器人高精度實時控制中的關鍵技術實現
4.1 多傳感器數據融合技術
協作機器人在工作過程中,需要綜合處理力傳感器、視覺傳感器等多源數據。MT6835 利用其強大的計算能力,采用卡爾曼濾波、粒子濾波等算法對多傳感器數據進行融合,提高數據的準確性與可靠性,為精準控制提供依據。
4.2 實時運動控制算法優化
針對協作機器人的運動控制,在 MT6835 上對傳統的 PID 控制算法進行優化,引入自適應控制、模型預測控制等先進算法。同時,利用芯片的多核特性,將復雜的運動學計算任務分配到多個核心并行處理,顯著提高算法執行效率,實現機器人的實時、精準運動控制。
4.3 通信實時性保障
為確保控制指令與反饋數據的實時傳輸,采用實時操作系統(RTOS)配合 CAN 總線等高速通信協議。MT6835 對 RTOS 的良好支持,保證了任務的優先級調度與實時響應,避免數據傳輸延遲,確保機器人控制的實時性。
五、應用案例分析
5.1 精密裝配場景應用
在 3C 產品精密裝配中,基于 MT6835 的協作機器人通過視覺傳感器識別零件位置與姿態,利用力傳感器實現柔順裝配。MT6835 快速處理視覺與力傳感器數據,執行高精度的軌跡規劃與力控制算法,使機器人能夠準確抓取并裝配微小零件,裝配精度達到微米級,裝配效率提升 30% 以上。
5.2 醫療康復場景應用
在醫療康復領域,協作機器人輔助患者進行肢體康復訓練。MT6835 根據患者的運動狀態與康復需求,實時調整機器人的運動軌跡與助力大小。通過力傳感器采集患者肢體與機器人的交互力,結合運動學算法,實現個性化的康復訓練方案,為患者提供安全、有效的康復治療。
六、結論與展望
本文研究表明,MT6835 芯片憑借其強大的計算能力、豐富的接口資源與良好的實時性,能夠有效滿足協作機器人高精度實時控制的需求。在實際應用中,基于 MT6835 的協作機器人在精密裝配、醫療康復等場景展現出優異的性能。未來,隨著芯片技術的不斷發展與控制算法的持續優化,MT6835 在協作機器人領域有望得到更廣泛的應用,推動協作機器人向更高精度、更智能化的方向發展。
以上文章系統呈現了 MT6835 在協作機器人中的應用。若你覺得某些部分需要擴充、調整,或是想更換案例,可隨時和我說。
審核編輯 黃宇
-
協作機器人
+關注
關注
2文章
505瀏覽量
30443
發布評論請先 登錄
基于霍爾傳感器與MT6835編碼器在辦公設備電機驅動中精度對比分析
工業機器人高精度控制方法:富唯智能開啟工業制造的“毫米級革命”
MT6835 磁編碼 IC 應用的深度剖析與技術點評

MT6835磁編碼IC——工業無人機中的關鍵技術
MT6835IC:智能配送機器人的強大引擎
高效運作的機器人背后,MT6835磁編碼IC是如何做到的?
探索 MT6835 磁編碼 IC 在 AGV 定位采摘機器人中的神奇應用
艾畢勝電子提供MT6835磁編碼IC在數控長臂攻絲機領域的應用前景
MT6835磁編碼IC在凸輪滾子轉臺中的應用

MT6835磁編碼IC是汽車電子油門踏板領域的璀璨明星
MT6835磁編碼IC在弧焊機器人領域的應用
MT6835磁編碼IC在航空中的驅控一體伺服系統的應用

MT6835磁編碼IC在自動化倉儲系統中的應用

MT6835磁編碼IC在自動鏈板流水線中控制電機的應用






 工商網監
工商網監
評論