 工業機器人高精度控制方法:富唯智能開啟工業制造的“毫米級革命”
工業機器人高精度控制方法:富唯智能開啟工業制造的“毫米級革命”

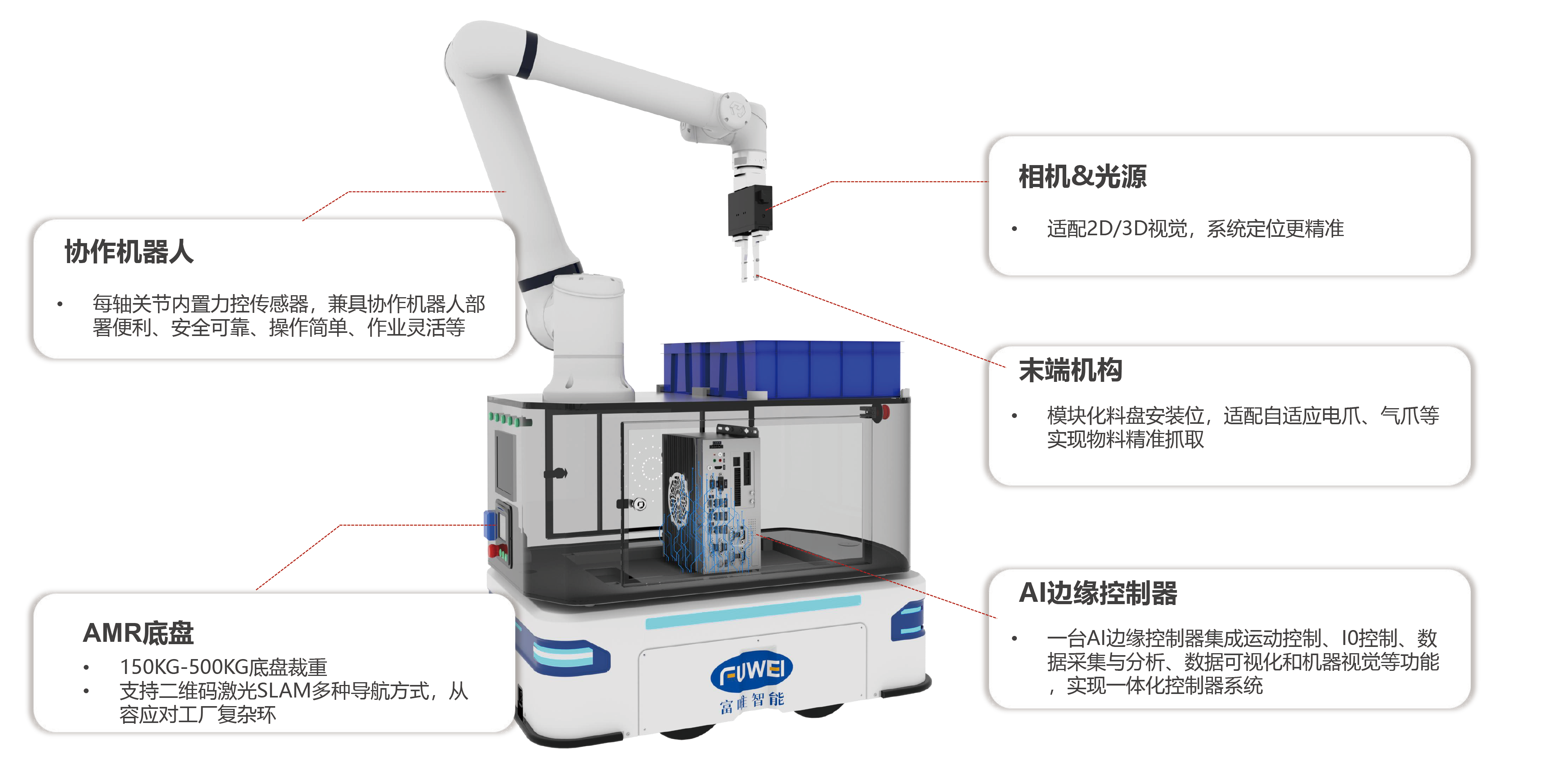
在智能制造邁向深水區的今天,具身智能工業機器人正成為工業自動化升級的核心驅動力。然而,復雜場景下的高精度控制需求,成為制約機器人規模化應用的“卡脖子”難題——從毫米級精密裝配到動態環境中的實時糾偏,傳統機械臂的剛性程序化控制已難以滿足柔性生產需求。如何通過具身智能工業機器人高精度控制方法突破這一瓶頸?富唯智能憑借其融合感知、決策與執行的全棧技術體系,為行業提供了標桿級解決方案。
一、行業挑戰:精度與柔性的雙重博弈
工業場景中,高精度控制不僅要求機器人具備毫米級定位能力,還需在動態環境中實時調整動作軌跡。例如,3C電子元件的微米級焊接、汽車零部件的高頻次抓取等場景,傳統機械臂因依賴預設程序,難以應對物料形變、環境干擾等問題,導致良品率波動與效率損失。具身智能工業機器人高精度控制方法的核心,正是通過“感知-決策-執行”閉環,賦予機器人自適應能力,實現精度與效率的兼得。
二、富唯智能的技術突破:三維協同下的精度躍遷
針對行業痛點,富唯智能以具身智能工業機器人高精度控制方法為核心,構建了“硬件+算法+數據”三位一體的技術體系,重新定義工業機器人的性能邊界:
三、高精度力控與視覺融合,夯實感知根基
富唯智能機器人搭載自研六維力傳感器與3D視覺系統,可實時捕捉接觸力、扭矩及環境三維信息,精度達到±0.05mm與±0.1mm。在汽車電池模組裝配中,機械臂能通過觸覺反饋感知零件微小形變,動態調整夾持力度,將裝配誤差控制在0.2mm內,良品率提升至99.8%。
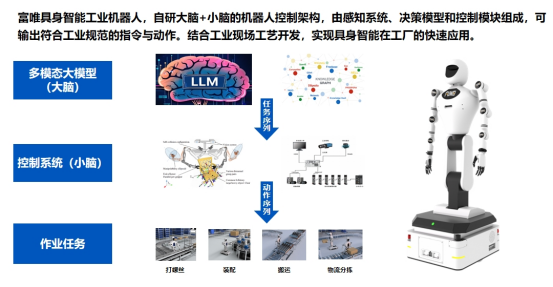
四、AI動態軌跡規劃,實現“手眼腦”協同
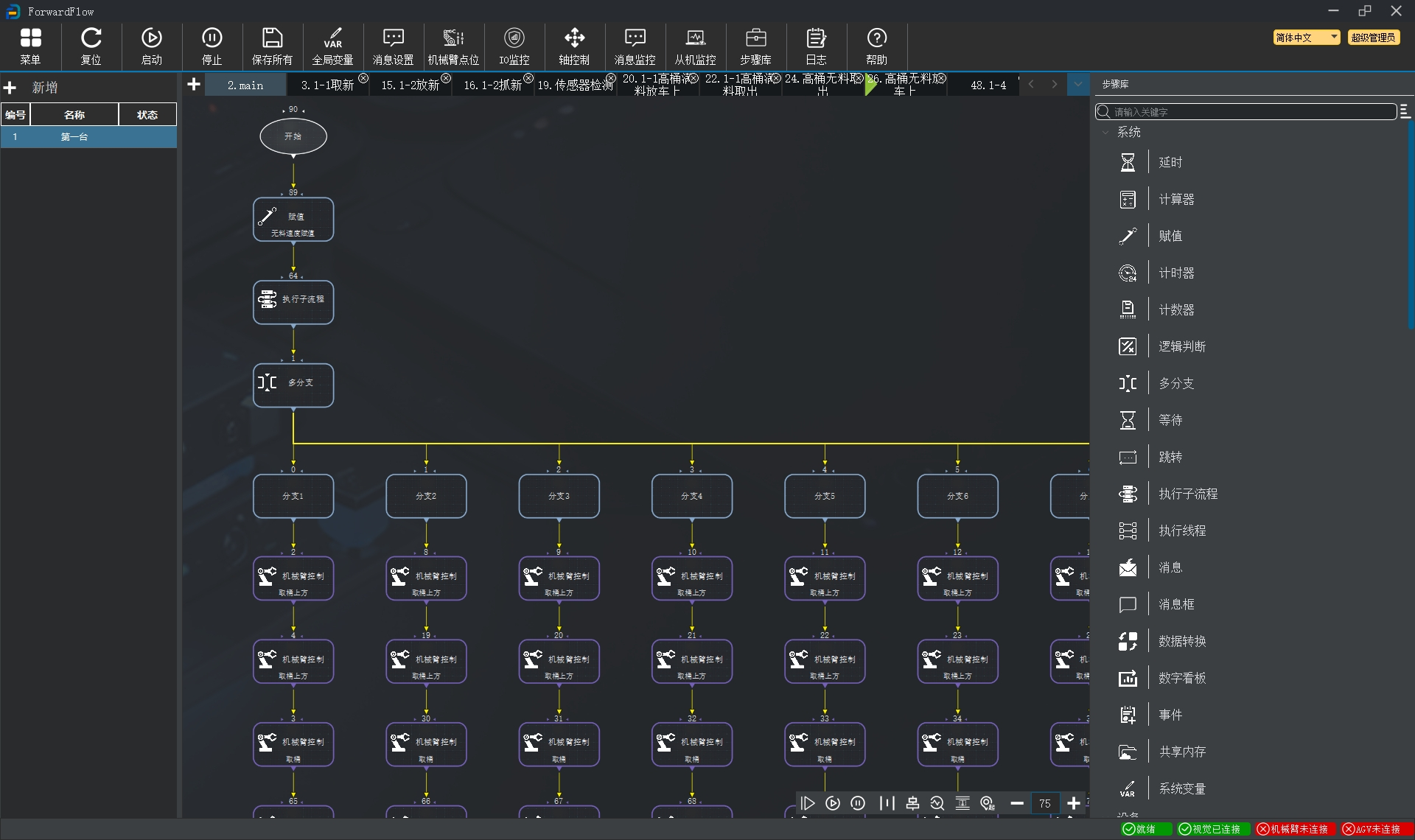
基于深度學習算法,富唯邊緣控制器可實時解析多模態數據,生成最優運動路徑。例如,在CNC機床上下料場景中,機器人能根據工件位置偏移自動修正抓取軌跡,響應時間小于50ms,較傳統控制方式效率提升40%。
五、閉環自校準系統,保障長期穩定性
富唯獨創的“感知-校準-執行”閉環系統,可在運行中自動補償機械磨損與溫漂誤差。某連接器生產企業實測數據顯示,機器人連續作業2000小時后,重復定位精度仍保持±0.02mm,遠超行業平均水平。
六、場景賦能:從理論到產線的價值落地
在電子行業精密裝配場景中,富唯智能通過具身智能工業機器人高精度控制方法,將傳統人工操作的12道工序整合為機器人全自動流程。以某頭部手機廠商為例,引入富唯解決方案后,屏幕貼合精度達到5μm,生產節拍縮短30%,人力成本降低70%
審核編輯 黃宇
-
工業機器人
+關注
關注
91文章
3456瀏覽量
94037
發布評論請先 登錄
工業裝配新紀元:富唯智能人形機器人重塑智造標桿
移動人形機器人:富唯智能開啟工業柔性自動化新時代
裝配領域的智能工匠:富唯智能人形機器人引領精密制造新紀元
GRID大模型:富唯智能人形機器人的“工業大腦”革命


智能復合機器人:糾偏算法如何重塑工業精度與效率?

工業機器人的未來發展方向:富唯智能以具身智能重構人機協作新范式


復合機器人能滿足多少毫米級的定位?
智造升級新引擎:具身智能工業機器人仿真軟件推薦與富唯智能的突圍之道
富唯智能復合機器人:解鎖工業生產新效能






 工商網監
工商網監
評論