") Blade350 QX2 AP組合直升機(jī)測評
Blade350 QX2 AP組合直升機(jī)測評

By Terry Dunnon .Testing: Blade 350 QX2 AP Combo Quadcopter Review
I’ve been flying an original DJI Phantom quadrotor for almost two years. Even though it’s never given me an ounce of trouble, watching the super-stable video footage from quads equipped with camera gimbals convinced me that I needed an upgrade. Rather than add a gimbal to my Phantom, I decided to keep it as a sport flyer and add a new quad to my fleet. The new ship is a Blade 350QX2 AP Combo (~$900)。 Its features are similar to the Phantom 2 Vision + reviewed by Norm and Will, but there are a several differences. I will talk about those variances throughout this review.
The Blade 350QX series is not new. It was first released in the summer of 2013. Like the Phantom, the 350QX lineup has seen continuous improvements and added options. The AP Combo is the first 350QX equipped with a 2-axis gimbal and a camera. Blade brand quads and helicopters are quite popular, so you are likely to find kits and spare parts at your local hobby shop.
What’s In the Box
The AP Combo is a turnkey setup. It includes the factory-built quad, a Spektrum DX4 transmitter, the gimbal, a 3-cell 3000mAh LiPo battery, and an AC charger for the battery. The only thing I had to add was a micro-SD card for the GoPro-like CGO1 camera. I used a SanDisk 16GB class 10 card. The quad was 95% ready to fly when I opened the box. Even the props were installed (a full extra set is included as well)。
The one required assembly step was to snap the gimbal unit into place on the bottom of the quad. If you’re not paying attention, it can be installed backwards. Trust me on that. If it doesn’t click into place easily, you’re doing it wrong. Retreat, regroup, and charge again. While I was working on the gimbal, I had the flight battery and camera charging on their respective chargers. The camera charges through a micro-USB cable (included)。
The Blade 350QX2 AP Combo includes everything except a micro-SD card for the camera. Very little assembly is required.
Blade includes a Quick Start Guide to lead you through the necessary steps to get the quad in the air. It is easy to follow and understand. A full manual is available online as are numerous videos. I found the online videos especially helpful. Since I had watched several of them while the quad was being shipped, I already knew what to expect when I opened the box.
The battery connectors are the popular EC3 style that is included with most Blade products as well as the other house brands distributed by Horizon Hobby (E-flite, Parkzone, ECX, Losi, Vaterra, etc.)。 They work fine and there is no reason to replace them. However, all of my RC equipment is configured with Deans Ultra Plugs. For the sake of consistency, I swapped the EC3s on the 350QX2 for Deans.
What’s a Gimbal?
In a nut shell, a gimbal is a device that isolates the camera from pitching and rolling movements of the quad that is carrying it. For example: if the quad tilts to the right, the gimbal control board senses this motion and rotates the roll axis of the gimbal to keep the camera level. The end result is that the video footage is much smoother than what can usually be obtained without a gimbal. An added benefit is that the pilot can change the tilt angle of the camera in flight when using certain transmitters…more on that later.
The GB200 2-axis gimbal works well to smooth out the bumps of a typical quad flight. It comes with a mount for the included CGO1 camera (shown), but a GoPro Hero 3 mount is also available.
The gimbal included with the 350QX2 is the GB200, which is an optional add-on for other 350QX models. As I mentioned, the assembly snaps right into the preinstalled base unit on the quad. Also of interest is the flexible isolation mount used here. Four rubber boots separate the top and bottom halves of the mount. This setup prevents minor vibrations in the quad from reaching the camera and causing the dreaded jello distortion in videos. As included with the AP Combo, the GB200 has a mount for the CGO1 camera that is also a part of the package. Blade offers a GB200 camera mount intended for the GoPro Hero3 as well.
CGO1 Camera
The included CGO1 camera has a form factor very similar to a GoPro. Its outer dimensions are within a few millimeters of a GoPro Hero 2 on every axis. It is a snug press fit into the gimbal mount and there is also a small thumb screw to make sure things stay in place. What is most unique about the CGO1 is the mushroom-like Wi-Fi antenna that protrudes from the bottom of the camera.
The CGO1 is surrounded by other action cameras for size reference. The Wi-Fi antenna on the bottom of the CGO1 provided great downlink performance.
I couldn’t find any documentation showing the approximate range of the CGO1’s W-Fi signal, but I can say that it works much further away and with much less latency than the similar system on my Hero 3 Black. The Wi-Fi transmitter is automatically activated when you turn the camera on. Without the antenna attached, the Wi-Fi system could overheat and fail. Because of that risk, you have to be sure to have the antenna attached whenever the camera is turned on.
The Wi-Fi signal can be used to see a real-time view from the camera, start/stop recording, choose between still photo and video modes, and a few other items. The interface is made possible via the CGO1 app, which is available for Apple or Android devices. Be advised that the CGO1 transmits a 5.8GHz signal and may not be recognized by all phones and tablets. My older iPhone 4S was no-go, but an iPhone 5 and iPad Mini worked fine. In case you were wondering, the DX4 transmitter includes a clamp that can hold most smartphones.
The CGO1 shoots 1080p video at 30FPS--not exactly cutting edge, but it’s good enough for most situations. Still photos are 2MP resolution at 1920 x 1080 pixels.
Flight Modes
The 350QX has three flight modes that are selectable via a 3-position switch on the transmitter. Smart Mode in intended for rookie quad flyers. In this mode, all control inputs are relative to the position and orientation of the quad when it was armed. You set the 350QX2 on the ground with the nose facing away from you. Then, stand at least 16ft behind the quad. You are now standing inside the “SAFE Circle”, a zone that the quad will (ideally) not fly into.
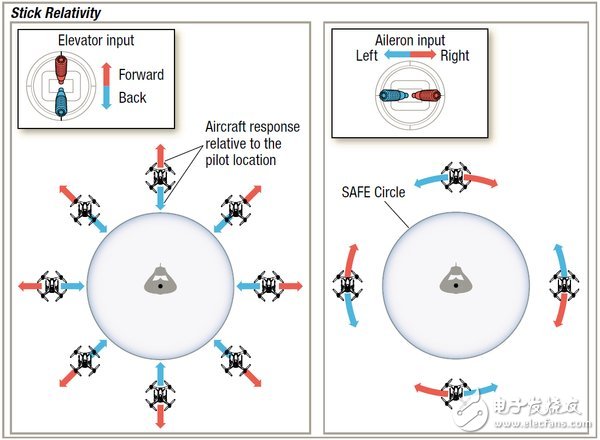
This diagram from the 350QX2 manual shows how control inputs are translated when in SMART Mode. (Horizon Hobby image)
In Smart Mode, pushing the right stick forward will send the quad away from the SAFE Circle. It doesn’t matter which way the nose of the quad is pointing. Pulling back on the stick will bring the quad back towards the circle. Moving the right stick to the right or left will send the 350QX2 in a clockwise or counter-clockwise (respectively) circular path concentric to the SAFE Circle. Basically, Smart Mode relieves the pilot from having to maintain orientation of the quad. It will always respond the same no matter what its present orientation is.
Smart Mode relieves the pilot from having to maintain orientation of the quad. It will always respond the same no matter what its present orientation is.
Another facet of Smart Mode is that the 350QX2’s altitude is limited to 45 meters. The throttle input on the left stick is treated as a (somewhat) linear relationship to that altitude range. Full throttle takes you to 45 meters. Mid-throttle will park the quad at an intermediate altitude. Full down on the throttle stick will bring the quad in for a landing. It may sound like a loose relationship, but I found it very easy to manage in flight. Left/Right movements on the left stick will rotate the quad on the yaw axis.
AP (Aerial Photography) Mode removes the SAFE Circle and makes pitch and roll inputs relative to the quad’s present orientation. Pushing forward on the right stick will send the 350QX2 towards whatever the nose is pointing at. You must maintain visual orientation of the quad in order to competently command it where to go. AP Mode maintains the altitude-relative throttle positioning seen in Smart Mode.
Stability Mode is similar to AP Mode with a few differences. The control authority on every axis is much greater. You have the ability to tilt the quad faster and further in any direction. This lets you reach surprisingly fast flight speeds. This maneuverability stops short of aerobatic moves, however. No flips or rolls with this guy.
In Stability Mode, the position of the throttle stick is now relative to the available power output of the motors. All the way up is full throttle. All the way down is zilch. You must manage the throttle position to climb, descend, or maintain altitude.
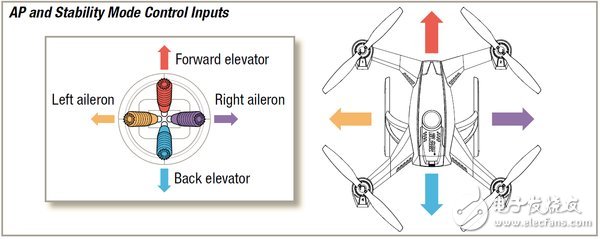
In AP Mode and Stability Mode, control inputs on the right stick are more conventional. (Horizon Hobby image)
All three flight modes share a few different traits that most flyers will appreciate. Position Hold will keep the quad steady over the same small plot of ground as long as you make no inputs to the right stick. You can yaw or change the throttle while maintaining position. The Self-Leveling feature brings the 350QX2 back to level flight when you release the right stick.
Perhaps the most important feature is the Return To Home switch. When you flip this switch on the transmitter, the 350QX2 will begin heading back to the point where it was launched and automatically land itself. This is very handy for those times when you get too far away and lose orientation.
Flying the Blade 350QX2
The first thing I noticed at the flying field is that there is less than an inch of ground clearance when the Wi-Fi antenna is attached to the camera. You’ll have to operate from a relatively smooth surface to make sure the quad rests on its skids rather than the antenna.
I’ve found that my 350QX2 typically needs anywhere from 30 seconds to 1 minute to get a GPS lock. Smart Mode will not allow you to take off until you get the lock. You can depart in AP or Stability mode prior to GPS lock, but you forfeit the GPS-driven functions such as Position Hold and Return To Home. My personal policy is to stay on the ground until I get the lock, regardless of the mode I am using.
Overall flight performance of the 350QX2 is excellent. The different flight modes make it applicable for pilots with varying abilities.
Takeoffs with the 350QX2 are very smooth. With my Phantom, I often have to jump it into the air because it acts unstable within a foot or two of the ground. I don’t see that trait with this quad. It does fine with gentle, gradual liftoffs.
I’ve logged a lot of time flying the 350QX2 in Smart Mode. Quite frankly, it makes me feel dumb. Since I am already comfortable flying quads with vehicle-centric inputs, I have a tough time transposing to the “stick relativity” approach required for Smart Mode. It works exactly like the manual says it should. It just doesn’t respond the way my pre-programmed brain thinks it should. Then again, this mode is tailor-made for people with zero flight experience. I can see where it would be very intuitive for those folks.
Control response is brisk and the quad can really get truckin’! Low-level, full-speed passes down the runway are easy to perform and fun to watch.
If you plan to stay in the multi-rotor game for a while, you’re going to have to learn how to fly with vehicle-centric inputs sooner or later. My suggestion has always been to learn this technique with a RC simulator and/or a quality mini quad. I’ll concede that Smart Mode on the 350QX2 offers an alternate path to earn your wings. The upfront cost is lower than my suggested route since you are not investing in another quad or software. However, the potential cost of mistakes increases when using the larger, more expensive 350QX2 to train. Also consider that you will have to “unlearn” Smart Mode flying once you’re comfortable enough to make the switch to normal flying. You have options, so choose what suits you.
I find AP Mode comfortable and casual. Pitch, roll and yaw inputs respond the way I am used to. I don’t have any trouble adjusting to the altitude-relative throttle commands. Control response in this mode is smooth and subtle--just what you want when shooting video or photos.
Most of my flight time is spent in Stability Mode. I think that is mostly due to my comfort level with flying quads. Control response is brisk and the quad can really get truckin’! Low-level, full-speed passes down the runway are easy to perform and fun to watch. That’s the sort of flying that I’m saving my old Phantom for, but this quad is good at it too.
With the Blade 350QX2 parked next to my DJI Phantom, it is easy to see their similarities in size and layout.
I’m still working on my throttle management skills with the 350QX2 to avoid ballooning upwards as I level off at the end of a high speed pass. I’m actually thankful that the quad doesn’t handle this chore for me. If there were no challenge to flying it, I would become bored very quickly. For the same reason, it doesn’t concern me that the 350QX2 does not have programmable way points and full auto-pilot. It’s only fun for me if I’m (mostly) in command. I don’t mind being helped with features like attitude stabilization and GPS hold. However, if I can’t see the quad and tell it what to do, I figure that I might as well be on the simulator.
I’ve flown the 350QX2 in winds ranging from dead calm to a gusty 20mph. In all cases, I was very impressed by the position holding ability of the quad. I don’t know what the normal tolerance is for this GPS system, but I’ve never seen my quad drift more than a few feet in any direction. This compares favorably with my Phantom, which also drops anchor in the air very reliably. I have to admit that the 350QX2’s altitude-relative throttle inputs used in Smart and AP modes make it really easy to hold a steady altitude as well.
An asymmetric layout and different colored props on the 350QX2 provide some relief for the ever-present challenge of in-flight orientation.
The footprint of the 350QX2 is not quite symmetrical. This helps a little with in-flight orientation, but only a little. Different colored props front and rear help a little more, as do contrasting LEDs on the bottom side of the frame. Despite all of these features, sorting out which end is which can be somewhat challenging at times. That’s true in varying degrees for every with quad-rotor that I’ve ever flown.
In all the countless flights I’ve logged on my Phantom, I’ve never needed to use the “Go-Home” feature. Nor have I ever felt an urge to test the efficacy of Go-Home by turning off the transmitter (the method for engaging Go-Home on early Phantoms)。 There’s just something about killing the only link I have with the quad that I find hard to digest.
I have no reservations about engaging Return To Home (RTH) on the 350QX2. I just have to flip a switch on the transmitter…which never gets turned off. Each time that I have used RTH, the 350QX2 was returned to almost the exact spot from which it departed. Having this RTH safety net will give me confidence to send the 350QX2 out a little beyond my visual comfort zone.。.maybe.
I get flight times up to 13 minutes on the stock 3000mAh battery. Popular 2200mAh batteries will also fit, yet they provide shorter flight times.
With the stock 3000mAh battery I am able to get 13 minute flights with no reserve. This includes a mixture of hovering and horsing around in moderate wind. Your specific conditions and flying style may net different results. I have a handful of 3-cell 2200mAh batteries that also work well in the 350QX2 with 7-8 minute flight times.
Overall, I’m pleased with how the 350QX flies. I can’t find any legitimate gripes. I think that total rookies can use Smart Mode to get the 350QX2 in the air and steer it with relative confidence. Anyone with some mini quad or simulator experience should have no trouble flying in AP Mode. Stability Mode is lively enough to keep most experienced pilots happy while still being easy to fly. I’m not sure that you can ask much more of an off-the-shelf quad-rotor.
But What About the Gimbal And Camera?
Oh yeah, the gimbal was the whole point of getting this quad. I’m happy to say that it has been working flawlessly. From the factory, it is programed with a slight downward tilt to the camera. This has turned out to be a good setting for landscape shots which capture good proportions of ground and sky. If you prefer a different tilt angle, it can be set manually when the quad is armed.
The footage I’ve captured since using the gimbal has been a big improvement over what I’m used to with rigidly mounted cameras. As expected, the field of view remains much more consistent as the quad is bucked by the wind or direction changes. That’s exactly what I was looking for.
Here we see the quad lean into the wind while the gimbal keeps the camera steady.
My experience with the CGO1 camera has been a mixture of good and bad. I’ll start with the good. The Wi-Fi signal and interface with the phone app have worked better than I expected. I routinely get a link that is solid nearly as far away as I’m willing to fly the quad. With my setup, I usually see about one second of lag. I’d never be comfortable flying via that delayed view, but it is more than adequate for framing shots.
Unfortunately, I have not been impressed by the image quality of the video or photos from the camera. Colors tend to be somewhat washed out, even under blue skies with good lighting. The phone app has brightness and contrast settings, which can provide some relief. However, I have yet to see the vibrant colors that I was hoping for.
A more significant issue is that every shot is slightly out of focus. It seems that the lens is set to focus on close objects (《 1 foot), which doesn’t make much sense for a camera intended to shoot from the sky. Even if the focus on my unit was not a problem, the color rendering issue alone would have driven me to substitute the CGO1 with my Hero 3 Black. The CGO1 isn’t awful, but my GoPro is better. So, why not use it?
1This still photo from the CGO1 camera illustrates the soft focus and subdued colors that convinced me to install my trusty GoPro on the 350QX2.
The Hero 3 mounts for the GB200 are presently on backorder, but I hope to have one soon. In the meantime, I have been able to fit the smaller GoPro in the CGO1 mount. I just fill the empty space with foam rubber shims and retain the camera with a Velcro strap. It may not be the best configuration balance-wise (important with gimbals) but it has worked well so far.
This shot was taken with my GoPro Hero 3 Black strapped to the gimbal. It is easy to see the differences in clarity and color between the GoPro and CGO1.
There are two down sides to my camera mount hack. First, some of the buttons on the GoPro are obscured by the mount. This means that I have to remove the camera after each flight to turn off the Wi-Fi. Secondly, the Wi-Fi on my GoPro stinks in both range and latency. I’m sure that I will soon just turn off the Wi-Fi and eyeball my shots from the ground.
Many GoPro owners have reported that the Wi-Fi interferes with the GPS receiver on their quad (true of DJI and Blade quads)。 I guess I dodged that bullet because I have not seen any adverse effects with the Hero 3 in my quad. Flyers that have tackled this issue claim that a copper foil shield around the camera is an easy remedy.
Alternate Control
The included DX4 transmitter works great and I have no complaints about it. Owners of other Spektrum computer transmitters (DX7S, DX8, DX9, or DX18) can bind their radio to the 350QX2 and add real-time tilt control of the gimbal. It’s an easy process and there are how-to videos specific to each transmitter.
The Spektrum DX4 transmitter is a good, no-frills match for this quad. Note the phone clamp which makes it easy to view the camera’s video downlink. Also shown are spare props, the flight battery, and charger.
My last several flights with the 350QX2 have used my DX8 for control. A 3-position switch controls the gimbal. The uppermost position commands the gimbal to tilt the camera upwards, while the bottom position sends it in the other direction. The middle position tells it to stay put. In addition to gimbal tilt, I was also able to set-up dual rates. Translated, that means I can choose how sensitive I want the controls to be with the flip of a switch.
Some flyers appreciate the familiarity of using just one transmitter for every flying machine they own. That capability is one of the primary benefits of owning a computer radio. I can see where those guys would jump at the chance to link their radio to the 350QX2. I’m not one of those guys. I certainly don’t mind using my DX8 for this quad. I’m finding, however, that I rarely use the additional features that it affords. I almost never change the camera’s tilt angle and I like the stock sensitivity settings. I also like the idea of having a dedicated transmitter just for the 350QX2. As soon as I finish this review, I plan to relink the simple but capable DX4 to the quad.
Summary of Opinions
For the most part the Blade 350QX2 AP Combo provided everything that I was looking for in a new aerial video platform. It included all of the equipment I needed in a prebuilt, all-in-one package. It flies every bit as well as my DJI Phantom while also incorporating a “return home” feature that I’m not terrified to utilize. My only real disappointment regarded the lackluster performance of the CGO1 camera. That being said, I didn’t really need a camera to be included in the first place. Blade would have had to throw in a pretty spectacular camera to make me abandon my Hero 3. Perhaps they will offer a package with the gimbal and Hero 3 mount while omitting the CGO1.
由特里鄧尼 測試:刀片350 QX2 AP組合四級審查
我已經(jīng)飛行了一個原始的DGI幻影四旋翼差不多兩年了。盡管它從來沒有給我一點(diǎn)麻煩,但從配備攝像頭支架的Quad看超級穩(wěn)定的視頻片段讓我確信我需要升級。我決定把它作為一個運(yùn)動傳單,而不是給我的艦隊(duì)增加一個新的四分之一,而不是給我的幻影增加一個萬向節(jié)。新船是一個刀片350QX2AP組合(900美元),其特點(diǎn)類似于幻像2視覺+標(biāo)準(zhǔn)和威爾審查,但有幾個不同之處。我將在這些評論中討論這些差異。
刀片350QX系列不是新的。它是在2013夏天首次發(fā)布的。像幻影一樣,350QX陣容已經(jīng)看到不斷改進(jìn)和增加選項(xiàng)。AP組合是第一個配備了兩軸萬向架和相機(jī)的350QX。刀片品牌Quad和直升機(jī)是很受歡迎的,所以你很可能會發(fā)現(xiàn)工具包和零部件在你當(dāng)?shù)氐臉I(yè)余愛好商店。
是什么在箱
美聯(lián)社組合是一個交鑰匙的設(shè)置。它包括工廠制造四,一個SPEKTRUM DX4發(fā)射器,萬向節(jié),3芯3000mAh的鋰聚合物電池和AC充電器為電池充電。我唯一不得不添加是一個micro-SD卡為GOPRO般CGO1相機(jī)。我用SanDisk的16GB類10卡。四是95%箭在弦上,當(dāng)我打開盒子。連道具都安裝(完整額外的設(shè)置也包括在內(nèi))。
一個必需組裝步驟是萬向架單元卡入到位于四元的底部。如果你沒有注意,也可以反向安裝。相信我這一點(diǎn)。如果沒有豁然開朗容易,你這樣做是錯誤的。撤退,重新集結(jié),并再次充電。當(dāng)我工作的萬向節(jié),我有飛行電池和相機(jī)充電在各自的充電器。通過一個微型USB連接線將相機(jī)費(fèi)用(含稅)。
該刀片350QX2 AP組合包括一切,除了一個micro-SD卡的相機(jī)。極少裝配是必需的。
刀片包括一個快速入門指南,以引導(dǎo)您完成必要的步驟來獲得在空氣中四。這是很容易跟蹤和了解。全手動聯(lián)機(jī)可作為眾多視頻。我發(fā)現(xiàn)在線視頻特別有用。既然我已經(jīng)看了其中幾個,而四是被運(yùn),我已經(jīng)知道會發(fā)生什么事情,當(dāng)我打開盒子。
電池連接器附帶大多數(shù)刀片產(chǎn)品以及由地平線業(yè)余愛好(E-FLITE,Parkzone,ECX,Losi,Vaterra等)分布在其他自有品牌流行EC3風(fēng)格。他們的工作很好,沒有任何理由,以取代他們。然而,所有的我的RC設(shè)備配置有院長超插頭。為了統(tǒng)一起見,我換的350QX2為院長的EC3s。
什么是萬向節(jié)?
在堅(jiān)果殼,萬向節(jié)是隔離的相機(jī)俯仰和滾動是背著它的四核的移動設(shè)備。例如:如果四傾斜向右側(cè),萬向節(jié)控制板檢測到這種運(yùn)動和旋轉(zhuǎn)的萬向節(jié)的側(cè)傾軸保持相機(jī)水平。最終的結(jié)果是,視頻畫面是要比通過通常在沒有常平架來獲得更平滑。一個附加的好處是,飛行員可以使用某些發(fā)射機(jī)。。.稍后更多時(shí)改變飛行攝像機(jī)的傾斜角度。
該GB200 2軸萬向節(jié)能很好地理順典型的四飛行的顛簸。它配備了一個安裝了包括CGO1相機(jī)(如圖所示),但GOPRO英雄3坐騎也可以。
附帶350QX2常平架是GB200,這是一個可選的附加的其它350QX機(jī)型。正如我所說,組裝卡正確插入四預(yù)裝的基本單元。同樣有趣的是靈活的隔離安裝在這里使用。四膠靴分開安裝的上半部和下半部。這種設(shè)置可以防止輕微振動四到達(dá)攝像頭,并造成可怕的果凍扭曲視頻。作為包含與AP組合中,GB200具有安裝為CGO1相機(jī),這也是包的一部分。刀片提供GB200攝像機(jī)安裝旨在用于GOPRO Hero3為好。
CGO1相機(jī)
附帶的CGO1照相機(jī)具有一個外形非常類似于GOPRO。其外部尺寸是內(nèi)于每一個軸GOPRO英雄2幾毫米。這是一個溫暖的壓入萬向支架和也有一個小的拇指螺絲,以確保事情留在原地。什么是最獨(dú)特的CGO1是蘑菇狀的Wi-Fi天線伸出從相機(jī)的底部。
該CGO1是由其他行動相機(jī)大小的參考包圍。在Wi-Fi天線上CGO1的底部提供了極大的下行鏈路的性能。
我找不到顯示CGO1的W-Fi信號的大致范圍內(nèi)的任何文件,但我可以說,它的工作原理進(jìn)一步去和比同類系統(tǒng)延遲更少我的英雄3黑色。當(dāng)您打開相機(jī)的無線網(wǎng)絡(luò)發(fā)射器被自動激活。如果沒有天線連接的Wi-Fi系統(tǒng)可能會過熱并失敗。正因?yàn)槿绱宋kU(xiǎn),你必須確保無論何時(shí)打開相機(jī)時(shí)已經(jīng)天線連接。
在Wi-Fi信號,可用于看到攝像機(jī)實(shí)時(shí)視圖,開始/停止錄制,靜態(tài)照片和視頻模式之間進(jìn)行選擇,和一些其他物品。該接口是通過CGO1的應(yīng)用程序,它可用于Apple或Android設(shè)備成為可能。被告知,該CGO1發(fā)送一個5.8GHz的信號,可能不是所有的手機(jī)和平板電腦的認(rèn)可。我的舊款iPhone 4S是不走的,但在iPhone 5和iPad迷你的罰款。如果您想知道,在DX4發(fā)射器包括一個夾具,可容納大多數(shù)智能手機(jī)。
該CGO1拍攝1080p視頻以30fps - 不完全是最先進(jìn)的,但它在大多數(shù)情況下已經(jīng)足夠了。不過照片是在1920×1080像素200萬像素的分辨率。
飛行模式
該350QX有三個飛行模式,可通過在發(fā)射器3位開關(guān)選擇。智能模式供菜鳥四傳單。在這種模式下,所有的控制輸入是相對于當(dāng)它被裝備四邊形的位置和方向。您可以設(shè)置在地面上的350QX2用鼻子面臨遠(yuǎn)離你。然后,站在至少16英尺四落后。你現(xiàn)在站在“安全圈”,使四會(理想)不飛入?yún)^(qū)內(nèi)。
這從350QX2手動圖顯示控制輸入是如何在智能模式下,當(dāng)翻譯。 (地平線業(yè)余愛好圖片)
在智能模式下,按下右搖桿向前將從外管局圈送四了。不要緊哪種方式四的鼻子指向。向后拉的棒將帶來四背面朝向圓。移動右搖桿向右或向左將派350QX2順時(shí)針或逆時(shí)針(分別)環(huán)形路同心向國家外匯管理局圈。基本上,智能模式減輕了飛行員不必維持四的方向。它總是不管其目前的定位是響應(yīng)相同。
智能模式不必維持四方位減輕了飛行員。它總是不管其目前的定位是響應(yīng)相同。
智能模式的另一面是,350QX2的海拔高度限制在45米。在左搖桿的油門輸入被視為該高度范圍內(nèi)的(有點(diǎn))的線性關(guān)系。全油門帶你到45米。中秋節(jié)油門將車停在四在中間高度。在油門全部下跌將帶來四為著陸。這聽起來像一個松散的關(guān)系,但我發(fā)現(xiàn)它非常易于管理的航班。在左搖桿左/右移動將旋轉(zhuǎn)偏航軸四。
AP(空中攝影)模式消除了安全圈,使相對于四公司目前的方向俯仰和滾動投入。推進(jìn)在右搖桿將發(fā)送350QX2對任何機(jī)頭指向。你必須保持四的視覺定位,以勝任命令它去哪里。 AP模式保持高度相對節(jié)氣門位置出現(xiàn)在智能模式。
穩(wěn)定模式,類似于AP模式有一些不同。在每個軸的控制授權(quán)大得多。你必須傾斜四更快,進(jìn)一步在任何方向的能力。這可以讓你達(dá)到驚人速度飛行速度。然而,這種機(jī)動性停止短的特技飛行動作。沒有翻轉(zhuǎn)或輥,這個家伙。
在穩(wěn)定模式下,油門桿的位置現(xiàn)在是相對于可用功率輸出的電動機(jī)。一路上漲是全油門。一路下來就是齊爾希。你必須管理節(jié)氣門位置攀登,下降,或保持高度。
在AP模式和穩(wěn)定模式,在右搖桿控制輸入更傳統(tǒng)。 (地平線業(yè)余愛好圖片)
所有這三個飛行模式分享幾個不同的特質(zhì),大多數(shù)傳單會升值。定位保持將保持穩(wěn)定的四在同一小塊地,只要你不作任何輸入的右搖桿。您可以偏轉(zhuǎn)或改變油門,同時(shí)保持位置。自流平功能帶來的350QX2恢復(fù)水平飛行,當(dāng)你松開右搖桿。
也許最重要的特點(diǎn)是回歸到原點(diǎn)開關(guān)。當(dāng)你翻轉(zhuǎn)的發(fā)射器這個開關(guān),350QX2將開始回籠,它被啟動,自動土地本身的地步。這是非常方便的那些時(shí)候,你離得太遠(yuǎn)而失去方向。
飛刀片350QX2
我注意到在飛行場的第一件事是,當(dāng)Wi-Fi天線被安裝到相機(jī)有小于離地高度英寸。你必須從一個相對平滑的表面工作,以確保四取決于它墊木,而不是天線。
我發(fā)現(xiàn)我的350QX2通常需要的任何地方從30秒到1分鐘獲得GPS鎖。智能模式會不會讓你起飛,直到你得到的鎖。您可以在AP或之前GPS鎖定穩(wěn)定模式離開,但是你放棄了GPS驅(qū)動的功能,如位置保存并返回到首頁。我個人的政策是留在地面上,直到我得到的鎖,無論我使用的模式。
在350QX2的整體飛行性能非常出色。在不同的飛行模式,使其適用于飛行員有不同的能力。
起飛與350QX2都非常順利。用我的幻影,我經(jīng)常要跳向空中,因?yàn)樗淖饔迷诘孛娴膬捎⒊邇?nèi)的不穩(wěn)定。我沒有看到該性狀與此四。它做精溫和,漸進(jìn)的liftoffs。
我已經(jīng)記錄了大量的時(shí)間飛在智能模式下350QX2。坦率地說,這讓我感到愚蠢。既然我已經(jīng)飛行的舒適與四邊形汽車為中心的投入,我有一個艱難的時(shí)間置換成所需要的智能模式“大棒相對論”的做法。它的工作原理完全一樣手冊說應(yīng)該。它只是不響應(yīng)我的預(yù)編程的大腦認(rèn)為它應(yīng)該的方式。然后,這種模式是專為人們零的飛行體驗(yàn)。我能看到那將是非常直觀的那些人。
控制反應(yīng)活躍,四能真正得到truckin‘!低級,全速向下傳遞的跑道很容易執(zhí)行,并讓人賞心悅目。
如果您打算留在飛行器游戲一段時(shí)間,你將不得不學(xué)習(xí)如何與汽車為中心的投入早晚飛行。我的建議一直是學(xué)習(xí)這種技術(shù)與RC模擬器和/或質(zhì)量小四。我承認(rèn),智能模式的350QX2提供了另一種路徑來賺取你的翅膀。前期成本比我建議的路線下,因?yàn)槟銢]有投資于其它四或軟件。然而,錯誤的潛在成本使用更大,更貴350QX2培養(yǎng)時(shí)增加。同時(shí)認(rèn)為,你將不得不“忘卻”智能模式飛行,一旦你舒適,足以使開關(guān)正常飛行。你有選擇,那么選擇什么適合你。
我發(fā)現(xiàn)AP模式舒適和輕松。俯仰,滾轉(zhuǎn)和偏航輸入的響應(yīng),我習(xí)慣的方式。我沒有任何麻煩調(diào)整到海拔相對節(jié)流閥命令。在此模式下控制響應(yīng)平滑和微妙的 - 你想拍攝視頻或照片時(shí),正是。
我大部分的飛行時(shí)間都花在穩(wěn)定模式。我認(rèn)為這主要是由于我的伴飛四邊形的舒適程度。控制反應(yīng)活躍,四能真正得到truckin’!低級,全速向下傳遞的跑道很容易執(zhí)行,并讓人賞心悅目。這是飛說我救了我的老幻影的那種,但是這四擅長這一點(diǎn)。
與刀片350QX2停在旁邊的我DJI幻影,很容易看到他們在大小和布局相似。
我還在我的油門管理技能與350QX2避免膨脹向上,因?yàn)槲曳€(wěn)定下來在高速通到底。我其實(shí)感到欣慰的是四不處理這個苦差事我。如果沒有挑戰(zhàn),以飛翔的話,我會變得無聊得非常快。出于同樣的原因,它不關(guān)心我,350QX2不具有可編程的方式分全自動駕駛。這是唯一的樂趣了我,如果我(主要)的命令。我不介意被幫助了像姿態(tài)穩(wěn)定和GPS保持功能。不過,如果我不能看到四,并告訴它做什么,我想,我還不如在模擬器上。
我已經(jīng)飛行在風(fēng)從風(fēng)平浪靜到風(fēng)口20英里每小時(shí)的350QX2。在任何情況下,我是用四線的位置保持能力非常深刻的印象。我不知道正常的寬容就是對這種GPS系統(tǒng),但我從來沒有見過我的四比幾只腳在任意方向漂移了。這與我的幻影,這也下降錨在空氣中很可靠相比,毫不遜色。我不得不承認(rèn),在智能和AP模式中使用的350QX2的海拔相對油門輸入使它很容易保持一個穩(wěn)定的高度為好。
非對稱布局和不同顏色的道具在350QX2對飛行方向始終存在的挑戰(zhàn)提供一些救濟(jì)。
該350QX2的足跡是不太對稱的。這有助于有點(diǎn)與飛行中的方向,但只有一點(diǎn)點(diǎn)。不同顏色的道具前部和后部的幫助多一點(diǎn),因?yàn)檫@樣做對比發(fā)光二極管在所述框架的底側(cè)。盡管所有這些功能,整理出這到底是哪個有時(shí)可能有點(diǎn)挑戰(zhàn)性。這在不同程度上為每一位與四旋翼,我已經(jīng)坐過如此。
在所有的無數(shù)的航班,我登錄我的幻影,我從來沒有需要使用“轉(zhuǎn)到家”的功能。我也沒有以往任何時(shí)候都感到一種沖動通過關(guān)閉發(fā)射機(jī)(方法從事早期鬼怪的Go-Home)以測試的Go-家的療效。這里還有一些關(guān)于殺害我有,我覺得難以消化四的唯一紐帶。
我對此毫無保留搞返回首頁(RTH)在350QX2。我只需要翻轉(zhuǎn)的發(fā)射器。。.。。.永遠(yuǎn)也不會被關(guān)閉的開關(guān)。我已經(jīng)使用RTH每一次,350QX2返回到幾乎從它出發(fā)的確切位置。有了這個RTH安全網(wǎng)會給我信心送350QX2出一點(diǎn)超出了我的視覺舒適區(qū)。。.。。.也許。
我得到的飛行時(shí)間長達(dá)13分鐘的股票3000mAh的電池。流行的2200mAh電池也適合,但他們提供更短的飛行時(shí)間。
隨著股市3000mAh的電池,我能得到?jīng)]有儲備13分鐘航班。這包括盤旋和在溫和風(fēng)胡鬧的混合物。您的具體情況和飛行風(fēng)格可能凈賺不同的結(jié)果。我有一個極少數(shù)的3芯2200mAh電池,在7-8分鐘的飛行時(shí)間的350QX2也工作得很好。
總體來說,我很高興與350QX過得如何。我找不到任何合法的抱怨。我認(rèn)為,總的新秀可以使用智能模式,以獲得350QX2在空氣中相對自信駕馭它。任何人只要有一些小型的四或模擬器的經(jīng)驗(yàn)應(yīng)該沒有問題,飛在AP模式。穩(wěn)定模式是不夠活潑,以保持最有經(jīng)驗(yàn)的飛行員幸福的同時(shí)仍然容易上手。我不知道,你可以問更多的場外現(xiàn)貨四轉(zhuǎn)子。
但對于萬向和攝像頭?
噢,萬向節(jié)是得到這四整點(diǎn)。我很高興地說,它已經(jīng)可以完美地運(yùn)行。從工廠,它是程序性有輕微向下傾斜相機(jī)。這已被證明是一個很好的設(shè)置風(fēng)景拍攝,捕獲地面和天空良好的比例。如果你喜歡一個不同的傾斜角度,可以手動設(shè)置時(shí)四布防。
因?yàn)槭褂昧巳f向,我拍攝的鏡頭是一個很大的改進(jìn),我已經(jīng)習(xí)慣了用剛性安裝攝像頭。正如預(yù)期的那樣,視場保持更加一致的四元是由風(fēng)或方向變化頂住。這正是我一直在尋找。
在這里,我們看到了四精益進(jìn)風(fēng),而萬向保持相機(jī)穩(wěn)定。
我與CGO1相機(jī)的經(jīng)歷是好的和壞的混合物。我先說好。在Wi-Fi信號和接口與手機(jī)應(yīng)用程序工作過,比我預(yù)想的要好。我經(jīng)常收到一個鏈接,是實(shí)心的近遠(yuǎn),我愿意飛四。隨著我的設(shè)置,我通常看到約一秒鐘滯后。我從來沒有舒服經(jīng)由延遲觀點(diǎn)飛行,但它是綽綽有余取景構(gòu)圖。
不幸的是,我并沒有留下深刻印象來自攝像機(jī)的視頻或照片的圖像質(zhì)量。顏色往往是有點(diǎn)沖了出去,即使在蔚藍(lán)的天空有良好的照明。手機(jī)應(yīng)用程序有亮度和對比度設(shè)置,它可以提供一些救濟(jì)。但是,我還沒有看到鮮艷的色彩是我所期待的。
更顯著的問題是,每一個鏡頭稍微失焦。看來,鏡頭設(shè)置專注于近處的物體(《1英尺),這沒有多大意義的相機(jī)打算從空中拍攝。即使專注于我的單位是不是有問題,單獨(dú)顯色問題將驅(qū)使我去替代CGO1與我的英雄3黑色。該CGO1是不可怕的,但我GOPRO更好。那么,為什么不使用它呢?
11本靜態(tài)照片從相機(jī)CGO1說明了柔焦和柔和的色彩,說服我的350QX2安裝我信賴的GOPRO。
英雄3掛載為GB200是目前的缺貨,但我希望很快有一個。在此期間,我已經(jīng)能夠適應(yīng)更小的GOPRO在CGO1坐騎。我只是填充泡沫橡膠墊片的空白,并保留了攝像頭,尼龍帶。它可能不是最好的配置均衡,明智的(與萬向支架很重要),但它一直很好,到目前為止。
這個鏡頭是采取我的GOPRO英雄3黑色綁在萬向節(jié)。很容易看到在GOPRO和CGO1之間的清晰度和顏色的差異。
有兩降雙方到我的攝像機(jī)安裝黑客。首先,一些上GOPRO按鈕被安裝遮蔽。這意味著我必須在每次飛行后,取出相機(jī)關(guān)閉無線網(wǎng)絡(luò)。其次,我GOPRO了Wi-Fi很臭的距離和延遲。我敢肯定,我會盡快只是關(guān)閉了Wi-Fi和地面眼球我的鏡頭。
許多GOPRO車主報(bào)告說,在Wi-Fi干擾了他們的四核GPS接收機(jī)(DJI的和刀片四邊形真)。我想我躲過了子彈,因?yàn)槲疫€沒有看到在我四英雄3任何不利影響。已經(jīng)解決了這個問題,傳單宣稱相機(jī)周圍的銅箔屏蔽是一個簡單的補(bǔ)救措施。
備用控制
所包含的DX4發(fā)射的偉大工程,我沒有抱怨它。的其他SPEKTRUM計(jì)算機(jī)發(fā)射機(jī)(DX7S,DX8,DX9,或DX18)擁有者可以自己無線電綁定到350QX2并添加萬向節(jié)的實(shí)時(shí)傾斜控制。這是一個簡單的過程,有如何做具體到每個發(fā)射器的視頻。
該SPEKTRUM DX4發(fā)射器是一個很好的,沒有廉價(jià)的比賽為這個四。請注意,手機(jī)夾,這使得它可以方便地查看相機(jī)的視頻下行鏈路。還示出了備用的道具的飛行電池,和充電器。
我與350QX2最后幾個航班都用我的DX8進(jìn)行控制。 3位開關(guān)控制的萬向節(jié)。最上面的位置指令萬向架傾斜相機(jī)向上,而底部位置發(fā)送它在另一個方向。中間位置告訴它留在原地。除了萬向節(jié)傾斜,我也能夠建立雙重比率。翻譯,這意味著我可以選擇我是多么的敏感希望控制要與交換機(jī)的翻轉(zhuǎn)。
一些傳單欣賞只使用一個發(fā)射器,用于他們自己的每一種飛行機(jī)器的熟悉程度。這種能力是擁有一臺電腦無線的主要優(yōu)點(diǎn)之一。我能看到那些家伙會很高興有機(jī)會到他們的無線鏈接到350QX2。我不是那些家伙之一。我當(dāng)然不介意用我的DX8此四。然而,我發(fā)現(xiàn),我很少使用它提供的附加功能。我?guī)缀鯊膩頉]有改變相機(jī)的傾斜角度,我喜歡股票靈敏度設(shè)置。我也喜歡有一個專門的發(fā)射器只是為350QX2的想法。當(dāng)我寫完這篇評論中,我打算重新鏈接簡單,但能夠DX4到四。
觀點(diǎn)摘要
在大多數(shù)情況下的刀片350QX2 AP組合,只要我一直在尋找一個新的空中視頻平臺的一切。它包含了所有我需要在一個預(yù)先構(gòu)建的設(shè)備,所有功能于一身的包。它飛的每一位和我DJI幻影同時(shí)還集成了,我不是害怕利用“回國”的功能。我唯一真正的失望都把CGO1相機(jī)的表現(xiàn)乏善可陳。話雖這么說,我并不真的需要一個攝像頭被包含在首位。刀片將不得不扔在一個非常壯觀的攝像頭,使我放棄我的英雄3.也許他們將提供包萬向節(jié),雖然省略了CGO1英雄3架。
-
無人機(jī)
+關(guān)注
關(guān)注
231文章
10815瀏覽量
186510
發(fā)布評論請先 登錄
一文詳解!獲取135部資質(zhì),沃飛長空如何布局低空場景三階路徑

是德科技AP5000系列模擬信號源在接收機(jī)測試中的應(yīng)用


臺積電最大先進(jìn)封裝廠AP8進(jìn)機(jī)
aP23682/aP23341/aP23170/aP23085系列語音OTP芯片英文手冊
電瓶車充電樁:多路智能充電樁-AP350系列(10/16路)
相機(jī)給DLPC350的triger in的信號質(zhì)量較差時(shí),會導(dǎo)致光機(jī)常亮怎么解決?
DLP4500-C350REF I2C燒錄固件異常的原因?
低空安防革命:鐳神智能激光雷達(dá)矩陣破解空域安全世紀(jì)難題

中興通訊圓滿完成青海航空應(yīng)急項(xiàng)目驗(yàn)收
壓電疊堆功率放大器在直升機(jī)機(jī)身振動研究中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論