") 室內(nèi)定位技術(shù)現(xiàn)狀及前景如何
室內(nèi)定位技術(shù)現(xiàn)狀及前景如何

室內(nèi)定位的應(yīng)用場景
1、精準(zhǔn)室內(nèi)導(dǎo)航
在復(fù)雜室內(nèi)環(huán)境下實現(xiàn)基于移動智能終端的實時導(dǎo)航,精度一般在1-5米,可實現(xiàn)跨樓層路線導(dǎo)引,讓路癡在室內(nèi)室外都能隨心自如。主要應(yīng)用于大型商超為客戶提供智能導(dǎo)購,醫(yī)院為病患提供電子導(dǎo)醫(yī),智慧園區(qū)為訪客提供智能引導(dǎo)等服務(wù)。
2、人員/物品實時定位
可對人員、物資、設(shè)備等目標(biāo)進(jìn)行精準(zhǔn)定位,精度一般分為厘米級定位、米級精度的定位,主要應(yīng)用于人員定位看護(hù),物資定位管理。常見場景有訪客定位管理、倉儲設(shè)備定位管理等。
3、歷史軌跡查詢
可隨時查看人員、物品在某個時間段內(nèi)的移動軌跡,便于實現(xiàn)人員崗位巡查、人員行為分析、物資調(diào)度安排等。主要應(yīng)用于事件歷史追溯、養(yǎng)老院老人智能看護(hù)等。
4、虛擬地理圍欄
通過系統(tǒng)在關(guān)鍵區(qū)域設(shè)置虛擬圍欄,一旦人員、物資、設(shè)備,未經(jīng)授權(quán)進(jìn)入或離開某區(qū)域,立即預(yù)警,保障安全。主要應(yīng)用于人員防走失、崗位管理、物資管控等。
5、位置數(shù)據(jù)收集
可在數(shù)萬人的大型會展中實現(xiàn)全時段位置信息收集,全面收集人群行為軌跡,查看在某展位停留時間、觀覽數(shù)據(jù),提供精準(zhǔn)營銷數(shù)據(jù),為客戶回訪和針對性營銷提供保障,提升展會客戶轉(zhuǎn)化率。
6、互動營銷
對于大型商超、景區(qū)、會展等場景,可以通過互動消息的推送實現(xiàn)線上線下互動營銷,比如微信“搖一搖周邊”、景區(qū)智能導(dǎo)覽等大多是基于此服務(wù)。
7、系統(tǒng)聯(lián)動
可以與定位現(xiàn)場的聲光報警系統(tǒng)、視頻監(jiān)控系統(tǒng)進(jìn)行聯(lián)動,實現(xiàn)預(yù)警的同時觸發(fā)警鈴或是現(xiàn)場視頻畫面,便于高效決策。
室內(nèi)定位技術(shù)現(xiàn)狀
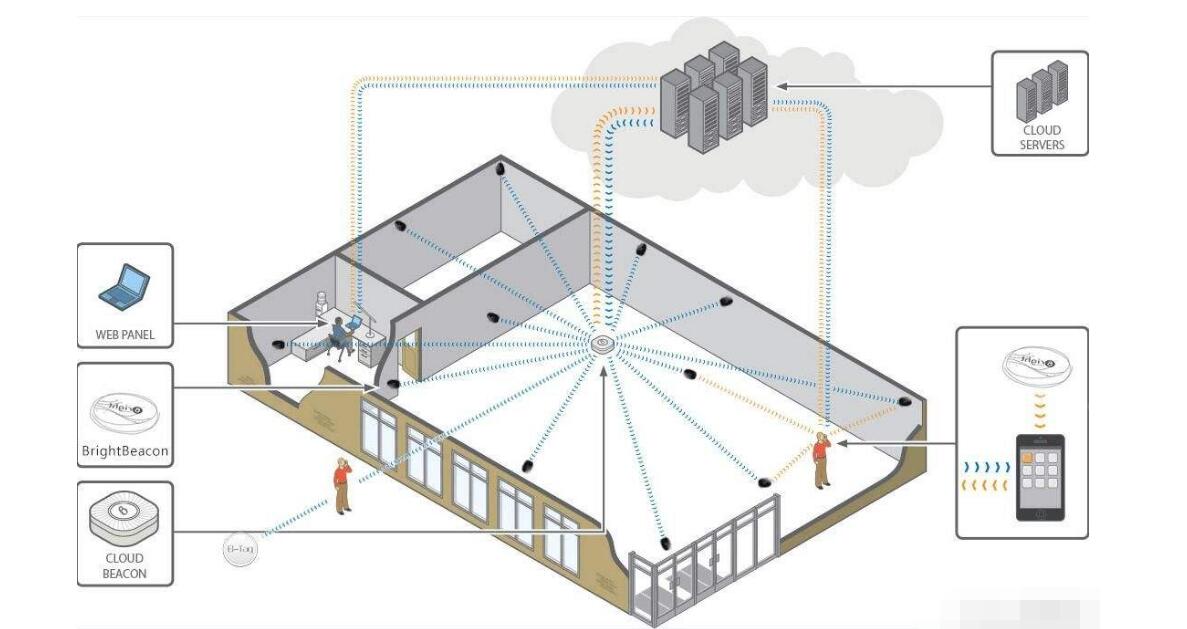
室內(nèi)定位從最初開始,基本上都是采用無線電(即RSS,ReceivedSignalStrength原理),紅外線,超聲波這幾種傳播介質(zhì)作為定位方案的實現(xiàn)載體。在這樣的情況之下也有各個高校,各大公司研制出了許多種室內(nèi)定位方案,如MITOxygen項目開發(fā)的Cricket系統(tǒng),Cricket定位系統(tǒng)基于超聲波和射頻信號的到達(dá)時間差來實現(xiàn)定位,還有諾基亞采用的HAIP技術(shù),該技術(shù)需要在室內(nèi)安裝一種定位發(fā)射臺,藍(lán)牙模塊與之通信,通過這兩者之間的通信完成定位,以及由微軟開發(fā)的RADAR系統(tǒng),該系統(tǒng)是最早的基于WiFi網(wǎng)絡(luò)的定位系統(tǒng),它采用射頻指紋匹配方法,即從指紋庫中查找最接近的幾個鄰居,取它們坐標(biāo)的平均作為定位目標(biāo)的坐標(biāo)估計數(shù)據(jù)。
然而目前這幾種主流的室內(nèi)定位方式似乎只要在成本上盡如人意了,性能方面便會出現(xiàn)欠缺,只要在性能方面盡如人意了,成本方面便會難以承受。而現(xiàn)在已經(jīng)有部分公司在突破傳統(tǒng),研制出開創(chuàng)性的新技術(shù),而科研方面的相關(guān)人員,尤其是我國的相關(guān)科研人員,卻大多數(shù)還停留在主流傳統(tǒng)方向上,這些人員之中,應(yīng)該有一部分人,在有條件的情況下,進(jìn)行開創(chuàng)性的室內(nèi)定位新技術(shù)的研究工作,從而更加合理,有效地利用科研資源。
室內(nèi)定位面臨難題
1.室內(nèi)空間復(fù)雜的信道環(huán)境與空間拓?fù)潢P(guān)系
對視頻信號來講,信號發(fā)射器和接收機(jī)間通視是定位的基礎(chǔ)。任何遮擋會導(dǎo)致信號強(qiáng)度的迅速衰減或直接阻擋信號的傳播。GNSS信號無法穿越厚厚的建筑墻面是一個典型的例子。衛(wèi)星導(dǎo)航信號從2萬多千米的高空,穿越大氣層后傳到地面,已經(jīng)很微弱,再加上墻壁或玻璃的遮擋,能進(jìn)入室內(nèi)的GNSS信號只能通過高靈敏度接收機(jī)接收,其定位精度在幾十米或者更差。
由于室內(nèi)空間復(fù)雜的拓?fù)潢P(guān)系,室內(nèi)空間內(nèi)部信號遮擋是室內(nèi)定位常遇到的問題,大大限制了很多室外定位技術(shù)在室內(nèi)普及的可能性,也把有效定位范圍限制在很小的范圍內(nèi),給實現(xiàn)室內(nèi)定位廣域覆蓋帶來極大的困難。此外,復(fù)雜的拓?fù)淇臻g也導(dǎo)致復(fù)雜信號傳播環(huán)境。大量的反射信號也直接影響到測量精度,從而導(dǎo)致較大的定位誤差。復(fù)雜的空間拓?fù)潢P(guān)系從定位精度和可用性兩個方面給室內(nèi)定位帶來諸多約束。
定位場景信號場的時空變化問題。除了復(fù)雜的空間拓?fù)潢P(guān)系外,室內(nèi)幾何環(huán)境和信號環(huán)境的時空變化也是維持定位系統(tǒng)的高可持續(xù)性的最大障礙(如Wi-Fi基站的增減,室內(nèi)電器和家具的布設(shè)變化,貨架貨物變化,展覽場館的布設(shè)變化等)。如何感知和認(rèn)知室內(nèi)幾何環(huán)境和信號環(huán)境的時空變化,提高對定位環(huán)境的自學(xué)習(xí)、自適應(yīng)能力,實現(xiàn)定位指紋庫(包括Wi-Fi指紋庫,地磁指紋庫等)、圖像特征庫、地標(biāo)信息庫自動更新,是室內(nèi)定位領(lǐng)域還沒解決的科學(xué)問題。
2.異源異構(gòu)的定位源
基于智能手機(jī)的室內(nèi)定位源主要包括3大類:衛(wèi)星定位,短距離射頻信號和傳感器。衛(wèi)星定位包括GPS、北斗、Galileo和GLONASS;短距離射頻信號包括Wi-Fi和藍(lán)牙;傳感器包括加速度計、磁力計、陀螺儀、氣壓計、光強(qiáng)度傳感器、麥克風(fēng)、揚(yáng)聲器和相機(jī)。個別智能手機(jī)還包括深度相機(jī),除了衛(wèi)星定位接收機(jī)以外,所有傳感器和射頻信號都不是為定位用途而設(shè)置的,手機(jī)商在選擇這些傳感器和射頻信號時首要考慮的性能不是定位。衛(wèi)星定位、短距離射頻信號和傳感器的信號機(jī)制和工作原理是完全不同的。他們測量的物理量和測量方法也不一樣,測量精度也因源而異。為了得到最優(yōu)的定位結(jié)果,通常需要融合這些異源異構(gòu)的定位驗。在融合這些異源異構(gòu)的定位源時,面臨以下問題:
(1)信號測量值同步問題。
由于不同定位源的測量過程是獨(dú)立工作的,不同測量值的采樣時間是不一樣的。如果位置計算在同一個手機(jī)上,可以把所有定位源的觀測值都統(tǒng)一到同一時間系統(tǒng)(如手機(jī)時間),通過內(nèi)差等方法把異源觀測量歸算到同一觀測歷元上。如果位置計算在云端服務(wù)器上,所有參與定位的手機(jī)都必須統(tǒng)一到同一時間基準(zhǔn),比如說網(wǎng)絡(luò)時。不同手機(jī)的異源觀測值也必須歸算到同一觀測歷元。前面所述方法只適用于用戶在低速運(yùn)動狀態(tài)下(運(yùn)動速度小于2m/s)。在高速運(yùn)動情況下,要考慮更高精度的時間同步方法。
(2)信號采樣頻率不一致。
比如Wi-Fi信號的采樣頻率為1/3Hz,而加速度計的采樣頻率可以達(dá)到180Hz。各種定位源的不同采樣頻率,要求定位算法具備不同歷元處理不同數(shù)據(jù)組合的能力,包括數(shù)據(jù)掉包情形。室內(nèi)定位的位置更新率應(yīng)該大于等于1Hz才能滿足大多數(shù)位置服務(wù)的需求,尤其是跟人流動線相關(guān)的應(yīng)用。
(3)信號測量精度差異問題。
低成本傳感器容易受環(huán)境因素干擾,影響信號測量精度,如運(yùn)動傳感器的測量精度就很差,不能直接用于慣性導(dǎo)航,但可以用于步頻探測。有些定位源如藍(lán)牙天線陣列、視覺定位、音頻定位等方法可以在局部范圍內(nèi)提供高精度距離、角度或坐標(biāo)測量值。由于受布設(shè)成本的限制,這些高精度測量值不能廣域覆蓋。這就要求定位算法有足夠的靈活性,融合不同觀測精度的定位源,讓有限的高精度測量值發(fā)揮最大的作用。
(4)不同定位終端測量偏差問題。
由于不同定位終端(如手機(jī))硬件上的差異,它們對同一定位源的測量值是存在偏差的。比如不同手機(jī)對同一Wi-Fi基站的信號強(qiáng)度(RSSI)測量值是有偏差的,這種偏差雖然不很大,但足以影響定位精度。不同手機(jī)的相機(jī)參數(shù)也不一樣,在定位時必須考慮定位終端硬件上的差異,通過定標(biāo)的方法,消除它們定位的影響。這點對高精度定位(優(yōu)于1m)尤為重要。
3.移動終端上有限的計算資源
移動終端的計算資源主要體現(xiàn)在3個方面:有限的計算能力、有限的供電能力和有限的存儲能力。隨著智能手機(jī)的計算性能越來越高,一些復(fù)雜的定位算法如視覺定位,粒子濾波等都慢慢出現(xiàn)在室內(nèi)定位的視野里。由于智能手機(jī)是一個多功能的終端,定位功能只能占據(jù)小部分的CPU處理時間以保證其他主流功能如打電話、微信、拍照等正常工作。從節(jié)能的角度看,不管手機(jī)的計算性能有多高,都不可以讓智能手機(jī)處于連續(xù)高速運(yùn)算狀態(tài),否則手機(jī)電池很快就耗盡。除此之外,智能手機(jī)上的存儲能力也有限,不足以運(yùn)行復(fù)雜的定位算法如圖像處理和復(fù)雜的深度學(xué)習(xí)算法。
室內(nèi)定位技術(shù)發(fā)展趨勢
(1)基于低功耗藍(lán)牙BLE的定位技術(shù)會被越來越廣泛應(yīng)用。藍(lán)牙室內(nèi)定位已發(fā)展一段時間,但過去并未受重視,隨著蘋果公司提出的iBeacon技術(shù),BLE定位受到相當(dāng)大的關(guān)注。目前基于該技術(shù)的信息推送應(yīng)用在零售業(yè)已經(jīng)獲得相當(dāng)大的響應(yīng),預(yù)期未來BLE室內(nèi)定位技術(shù)會更多結(jié)合信息推送、移動支付等應(yīng)用,或被實踐在日常生活上提供個性化服務(wù)。
(2)多種技術(shù)結(jié)合的混合定位方法,以滿足各種室內(nèi)環(huán)境和應(yīng)用場景的需求,并彌補(bǔ)單一技術(shù)的局限。越來越多的解決方案已經(jīng)將9軸或12軸慣性傳感器技術(shù)和其它技術(shù)如基于WiFi的定位技術(shù)融合到一起,并且這已經(jīng)成為趨勢。Google、Broadcom、CSR都提供多種技術(shù)融合的混合解決方案。未來會有更多的解決方案是完整的傳感器/WiFi/BLE的混合解決方案以滿足多種需求。
(3)室內(nèi)地圖和室內(nèi)定位數(shù)據(jù)庫會迅速發(fā)展,相關(guān)技術(shù)趨于成熟,以保證快速擴(kuò)展的能力和定位性能的可靠性與一致性。這里的挑戰(zhàn)包括地圖和數(shù)據(jù)庫的擴(kuò)展性,快速有效地產(chǎn)生和維護(hù)數(shù)據(jù)庫的技術(shù),比如通過眾包的方法。
(4)基于位置的應(yīng)用和服務(wù)會更多利用附近的感應(yīng)和發(fā)現(xiàn)。相對定位而言,附近的發(fā)現(xiàn)會更簡單因為它并不需要計算精確位置,而只是發(fā)現(xiàn)附近的設(shè)備就能提供相應(yīng)的服務(wù)。這種技術(shù)對于室內(nèi)和連續(xù)無處不在的定位而言有很大影響,并可以作為很好的補(bǔ)充,尤其是針對精確定位不容易實現(xiàn)的場景。相關(guān)的技術(shù)有BT/BLE、LTEDirect、WiFiDirect、NFC等。
(5)采用專用的定位引擎來處理定位、運(yùn)動檢測、傳感器數(shù)據(jù)分析、信息融合和地理圍欄等。通過用專用的處理器來處理運(yùn)動,情境和定位,可以降低對應(yīng)用處理器的喚醒,以優(yōu)化和降低功耗,達(dá)到隨時隨地都知道所處位置的目標(biāo)。
(6)低功耗優(yōu)化,降低定位功能對移動設(shè)備帶來的額外功耗以實現(xiàn)隨時隨地的精準(zhǔn)定位。包括使用專用的定位處理引擎以盡量少喚醒應(yīng)用處理器,結(jié)合運(yùn)動檢測和行為模式的檢測來降低功耗,通過多種定位技術(shù)的融合選擇最省電同時滿足精度的技術(shù),并關(guān)閉或使高功耗的定位技術(shù)處于休眠模式,以降低高功耗傳感器的使用等。
-
室內(nèi)定位
+關(guān)注
關(guān)注
30文章
307瀏覽量
36991
發(fā)布評論請先 登錄
工業(yè)電機(jī)行業(yè)現(xiàn)狀及未來發(fā)展趨勢分析
低成本、高精度:巍泰技術(shù)UWB信標(biāo)定位系統(tǒng),為室內(nèi)定位降本增效

智慧化工園區(qū)高精度室內(nèi)定位解決方案
如何才能實現(xiàn)更精準(zhǔn)的室內(nèi)定位

室內(nèi)定位精確導(dǎo)航技術(shù)支持的技術(shù)手段有哪些
常見室內(nèi)定位技術(shù)詳解及其發(fā)展
如何應(yīng)對UWB室內(nèi)定位信號被遮擋

UWB標(biāo)簽在室內(nèi)定位中的優(yōu)勢
目前市場主流的不同室內(nèi)定位效果對比

aoa室內(nèi)定位技術(shù)的優(yōu)劣勢和應(yīng)用前景
藍(lán)牙AOA定位模塊主要應(yīng)用前景如何?

如何實現(xiàn)室內(nèi)精準(zhǔn)定位?分享室內(nèi)精準(zhǔn)定位技術(shù)及方法

無線室內(nèi)定位系統(tǒng)是通過什么技術(shù)實現(xiàn)的呢?

室內(nèi)藍(lán)牙導(dǎo)航定位技術(shù)應(yīng)用優(yōu)勢
如何利用LoRa實現(xiàn)室內(nèi)定位?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論