") 自動駕駛中常提的慣性導(dǎo)航系統(tǒng)是個啥?可以不用嗎?
自動駕駛中常提的慣性導(dǎo)航系統(tǒng)是個啥?可以不用嗎?

[首發(fā)于智駕最前沿微信公眾號]每次提到自動駕駛硬件時,大家可能第一反應(yīng)想到的是激光雷達(dá)、車載攝像頭、毫米波雷達(dá)等,但想要讓自動駕駛車輛實(shí)際落地,有一個硬件也非常重要,那就是慣性導(dǎo)航系統(tǒng)。在很多討論自動駕駛技術(shù)的內(nèi)容中,慣性導(dǎo)航系統(tǒng)的出場頻次遠(yuǎn)低于激光雷達(dá)、車載攝像頭等硬件,那慣性導(dǎo)航系統(tǒng)到底是個啥?這個硬件可以不用嗎?
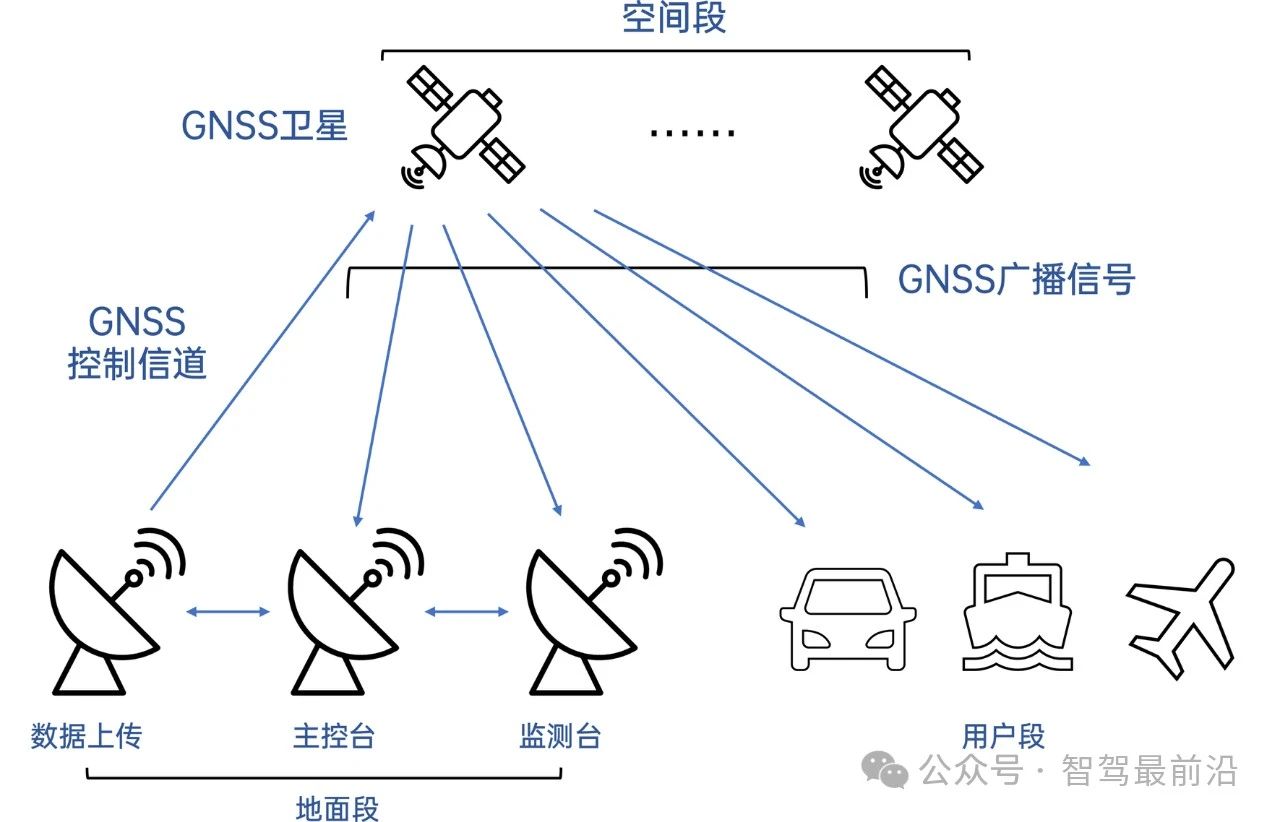
慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)是現(xiàn)代自動駕駛技術(shù)中的重要組成部分,它通過搭載在車輛上的慣性測量單元(Inertial Measurement Unit,IMU)來實(shí)時感知車輛的運(yùn)動狀態(tài),其中包括加速度、角速度等信息,然后經(jīng)過濾波和積分運(yùn)算,推算出車輛的位置、速度和姿態(tài)。對于自動駕駛車輛而言,準(zhǔn)確、可靠的位姿信息不僅關(guān)系到車輛自身的運(yùn)動規(guī)劃與控制,也影響到環(huán)境建圖、障礙物檢測與避讓等核心功能的實(shí)現(xiàn)。即便在衛(wèi)星導(dǎo)航(GNSS)信號較為穩(wěn)定的城市開放道路上,慣性導(dǎo)航也能提供高頻率、低時延的位姿更新;在隧道、地下車庫、深林或高樓林立的“都市峽谷”等GNSS信號不足或受干擾的環(huán)境中,慣性導(dǎo)航更是不可或缺的導(dǎo)航保障。
慣性測量單元一般包含三軸加速度計和三軸陀螺儀。加速度計負(fù)責(zé)測量車輛在三個正交方向上的線性加速度,而陀螺儀則測量車輛繞三個軸的角速度。通過對這些加速度和角速度信號進(jìn)行積分,可以得到車輛的速度和位移,以及姿態(tài)角(橫滾、俯仰、偏航)。整個過程無需外部參照,僅依賴自身傳感器,因此具有完全自主、全天候、任意區(qū)域可用的特點(diǎn)。然而,慣性導(dǎo)航也存在一個固有的問題,由于積分運(yùn)算對傳感器誤差(如偏置、噪聲、溫漂)非常敏感,隨著時間的推移,導(dǎo)航解會產(chǎn)生累積漂移,尤其是在長時間、長距離運(yùn)動中更為明顯。

為了克服慣性導(dǎo)航的漂移問題,自動駕駛系統(tǒng)通常會將INS與其他傳感器深度融合。最常見的是與GNSS進(jìn)行緊耦合(Tightly-Coupled)或松耦合(Loosely-Coupled)融合,將GNSS提供的絕對定位信息用于修正INS的漂移;同時,視覺里程計(Visual Odometry)或激光雷達(dá)里程計(LiDAR Odometry)也能提供相對位移信息,通過多傳感器融合算法(如擴(kuò)展卡爾曼濾波、無跡卡爾曼濾波、粒子濾波或者因子圖優(yōu)化等)進(jìn)一步提升導(dǎo)航精度與魯棒性。在復(fù)雜環(huán)境下,當(dāng)GNSS信號中斷時,視覺或激光里程計往往受限于光照、天氣或幾何結(jié)構(gòu)等因素,此時INS仍能持續(xù)提供高頻位姿測量,確保車輛在短期內(nèi)不會丟失對自身運(yùn)動狀態(tài)的感知。
與INS相輔相成的還有車輪里程計(Wheel Odometry)。車輪里程計通過測量車輪轉(zhuǎn)速來估算車輛行駛距離和速度,但在打滑、爬坡或不平路面時會產(chǎn)生較大誤差。通過將INS、GNSS、視覺/激光里程計與車輪里程計等多傳感器進(jìn)行融合,實(shí)現(xiàn)多源互補(bǔ),以充分發(fā)揮各自優(yōu)勢、彌補(bǔ)單一傳感器的不足。
既然INS有一定的缺陷,且不是主要的感知硬件,那在自動駕駛中是否直接取消呢?從理論上講,如果自動駕駛車輛始終處于GNSS覆蓋良好、信號無干擾的開放道路環(huán)境,并且視覺或激光傳感器工作狀態(tài)穩(wěn)定,也可以依賴GNSS定位或里程計來實(shí)現(xiàn)車輛定位。但在實(shí)際應(yīng)用中,這種理想狀態(tài)幾乎不存在。隧道、橋梁下、地下停車場、高架道路以及城市高樓密集區(qū)域,GNSS信號往往會間斷或多徑干擾;夜間、雨雪霧等惡劣天氣條件下,攝像頭和激光雷達(dá)也可能失去可靠的環(huán)境感知能力。此時,INS作為一種“最后防線”式的自主導(dǎo)航手段,能夠在短時間內(nèi)維持車輛的安全行駛。因此,完善的自動駕駛系統(tǒng)通常會將慣性導(dǎo)航視作基礎(chǔ)且不可或缺的模塊。
其實(shí)不同級別的自動駕駛系統(tǒng)對慣性導(dǎo)航的依賴程度也有所差異。對于L2及以下級別的輔助駕駛系統(tǒng),車輛主要依賴駕駛員監(jiān)控,慣性導(dǎo)航的精度要求相對較低,一般低成本的IMU就可以滿足基本需要。而對于L4/L5全自動駕駛,尤其是需要在高速公路、城市復(fù)雜道路自主出行等場景下,系統(tǒng)需要對車輛的位置、姿態(tài)進(jìn)行精確控制,慣性導(dǎo)航的測量精度和穩(wěn)定性顯得尤為關(guān)鍵。高精度慣性導(dǎo)航通常需要固態(tài)陀螺儀、硅陀螺、光纖陀螺或振動陀螺等高性能傳感器,并配合溫度補(bǔ)償、在線標(biāo)定等技術(shù),才能在長時間運(yùn)行中保持較低的漂移率。
隨著高精度時鐘技術(shù)和蜂窩網(wǎng)絡(luò)定位(如5G定位)等新興技術(shù)的發(fā)展,一些研究開始探索能否在保證定位精度的同時,減少對傳統(tǒng)慣性導(dǎo)航的依賴。5G網(wǎng)絡(luò)定位通過毫米波信號的時延和角度測量,可實(shí)現(xiàn)亞米級的定位精度,且具備良好的抗干擾能力;高精度時鐘則有助于改進(jìn)INS的時間同步和誤差建模。不過,這些新技術(shù)還處于發(fā)展或初步商用階段,覆蓋范圍、成本以及與現(xiàn)有自動駕駛平臺的適配度都尚需進(jìn)一步驗證。因此,將INS與GNSS、視覺、激光雷達(dá)、車輪里程計等多種技術(shù)相融合的方案,仍將是主流的自動駕駛定位架構(gòu)。
從系統(tǒng)設(shè)計角度看,要實(shí)現(xiàn)穩(wěn)定可靠的慣性導(dǎo)航,需要重點(diǎn)關(guān)注IMU的標(biāo)定與誤差模型建立。傳感器在出廠后需進(jìn)行三軸對準(zhǔn)、偏置測量、噪聲譜分析及溫漂標(biāo)定;在車輛運(yùn)行過程中,還需通過在線濾波算法或閉環(huán)控制進(jìn)一步抑制誤差積累。此外,軟件層面要優(yōu)化數(shù)據(jù)采集與融合算法,確保算法計算的實(shí)時性和魯棒性;硬件層面則要注意IMU的安裝位置、減振防抖以及電磁兼容等問題,以免車輛自身振動或電路干擾對IMU測量造成影響。
綜上所述,慣性導(dǎo)航在自動駕駛中扮演著“基石”角色。它為車輛提供了全天候、連續(xù)、自主的短時高頻位姿信息,尤其在GNSS信號不穩(wěn)定或多傳感器受損的情況下,能夠保證車輛對自身運(yùn)動狀態(tài)的實(shí)時感知。雖然現(xiàn)有的多傳感器融合方案不斷涌現(xiàn),并且新技術(shù)也在探索減少對INS的依賴,但要想在各種復(fù)雜道路環(huán)境和行駛工況下都保持穩(wěn)定可靠的定位性能,慣性導(dǎo)航仍然是不可或缺的一環(huán)。未來,我們也許會看到更多輕量化、低漂移的新型IMU,以及更智能化的融合算法,但在可以預(yù)見的相當(dāng)長一段時間里,INS必將是自動駕駛導(dǎo)航系統(tǒng)的核心組件之一。
-
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4244瀏覽量
193110 -
自動駕駛
+關(guān)注
關(guān)注
790文章
14362瀏覽量
171088 -
慣性導(dǎo)航系統(tǒng)
+關(guān)注
關(guān)注
1文章
29瀏覽量
5490
發(fā)布評論請先 登錄
自動駕駛中常提的“時序”是個啥?有啥作用?
這款MEMS組合導(dǎo)航系統(tǒng)如何做到60秒高精度導(dǎo)航?

自動駕駛中常提的高精度地圖是個啥?有何審查要求?

自動駕駛中常提的世界模型是個啥?

自動駕駛中常提的HMI是個啥?
組合導(dǎo)航系統(tǒng)中的慣性導(dǎo)航系統(tǒng)是什么?

組合導(dǎo)航系統(tǒng)中的慣性導(dǎo)航系統(tǒng)是什么?
霍尼韋爾推出新一代慣性導(dǎo)航系統(tǒng) HGuide-N380

自動駕駛中常提的“點(diǎn)云”是個啥?

自動駕駛行業(yè)常提的高階智駕是個啥?

自動駕駛中常提的“NOA”是個啥?

自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
自動駕駛中常提的魯棒性是個啥?

自動駕駛中常提的SLAM到底是個啥?

為什么自動駕駛中全球導(dǎo)航衛(wèi)星系統(tǒng)如此重要?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論