") ABB機器人互換位置指令
ABB機器人互換位置指令

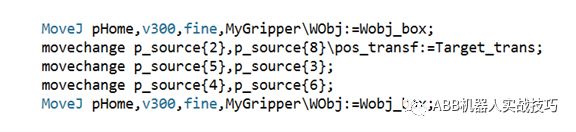
1)如上圖,希望把1-8位置產(chǎn)品,按照顏色排序,達到圖下效果
2)實現(xiàn)方法:
A)吸取位置2,放置到過渡點,
從位置8吸取,放置到位置2,
從過渡點吸取,放置到位置8
B)吸取位置5,放置到3
C)吸取位置4,放置到6
3)可以創(chuàng)建帶參數(shù)的例行程序,movechange pos1,pos2pos_transf:=target_transf
其中反斜杠表示可選參數(shù)。
即如果選擇了可選參數(shù)pos_transf,則該指令表示利用target_transf位置,對pos1和pos2互換
如果沒有選擇反斜杠pos_trans,則從pos1吸取,放置到pos2
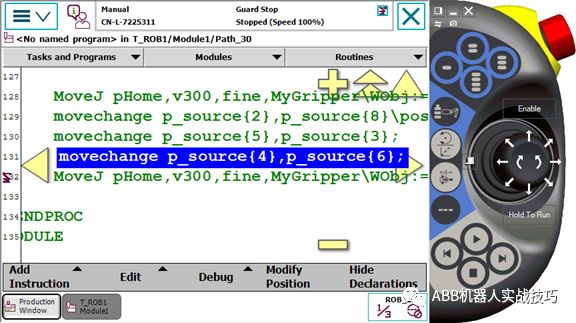
4)針對以上邏輯,創(chuàng)建指令如下:
可選參數(shù)的選擇如下:
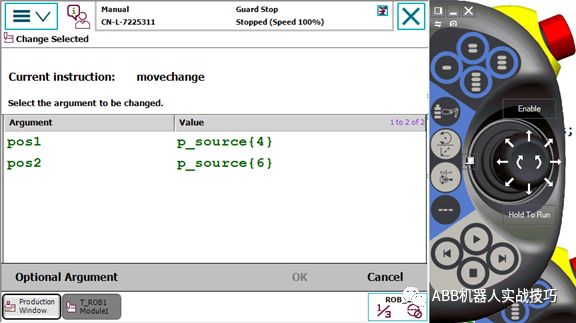
點擊movechange
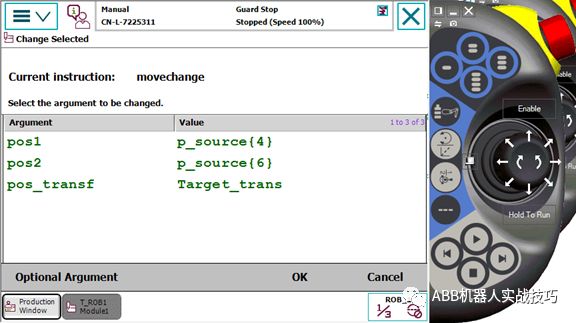
點擊左下角可選參數(shù),點擊use
輸入過度位置
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
指令
+關(guān)注
關(guān)注
1文章
616瀏覽量
36422 -
ABB機器人
+關(guān)注
關(guān)注
15文章
89瀏覽量
30281
原文標(biāo)題:ABB機器人互換位置指令
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
ABB推出三大全新機器人系列
基于30多年在中國機器人行業(yè)的領(lǐng)導(dǎo)地位,ABB于7月2日重磅發(fā)布了Lite+、新一代IRB 1200小型工業(yè)機器人和PoWa協(xié)作機器人三大全新機器人
開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接三菱PLC與ABB機器人配置案例
本案例是三菱PLC通過開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人的配置案例,具體分為三部分設(shè)置,分別為三菱PLC設(shè)置,ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)的配置以及ABB

開疆智能Profient轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接ABB機器人MODBUS TCP通訊案例
本案例是通過開疆智能Profinet轉(zhuǎn)ModbusTCP網(wǎng)關(guān)將西門子PLC與ABB機器人進行通訊 因西門子PLC采用Profinet協(xié)議,而ABB機器人采用的是ModbusTCP通訊。

盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
詳細(xì)介紹機場智能指路機器人的工作原理
負(fù)責(zé)接收旅客的語音指令,以便機器人理解旅客的需求。
環(huán)境感知與信息融合 :這些傳感器收集到的信息會進行融合處理。例如,激光雷達提供的距離信息和攝像頭捕捉的視覺信息相結(jié)合,能讓機器人更準(zhǔn)確地識別周圍環(huán)境
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
講解了如何在 ROS 2 中實現(xiàn)機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節(jié)點,可以接收來自上層的控制指令,如速度指令或目標(biāo)位置
發(fā)表于 04-27 11:24
ABB機器人與西門子PLC通訊案例
在現(xiàn)代工業(yè)自動化領(lǐng)域中,機器人與可編程邏輯控制器(PLC)之間的通訊是實現(xiàn)高效、精準(zhǔn)生產(chǎn)線的關(guān)鍵。ABB機器人與西門子PLC作為行業(yè)內(nèi)的佼佼者,其通訊技術(shù)的掌握對于提升生產(chǎn)效率、優(yōu)化生產(chǎn)流程具有
ABB機器人(機械手臂)數(shù)據(jù)采集到MES系統(tǒng)解決方案
ABB工業(yè)機器人廣泛應(yīng)用于各種工業(yè)領(lǐng)域,能夠替代人工執(zhí)行高強度的生產(chǎn)工作,如碼垛、焊接、沖壓、噴涂、裝配、分揀等,能夠有效提高工作效率與質(zhì)量安全。比如碼垛工作,傳統(tǒng)工廠需要人工搬運到托盤上,勞動強度

ABB機械手臂(機器人)數(shù)據(jù)采集物聯(lián)網(wǎng)解決方案
ABB工業(yè)機器人廣泛應(yīng)用于各種工業(yè)領(lǐng)域,包括汽車制造、電子產(chǎn)業(yè)、食品和飲料生產(chǎn)、醫(yī)藥制造、物流和倉儲等。它們可用于自動化的裝配、焊接、噴涂、搬運、包裝和機器人輔助操作等任務(wù),極大地提高了工業(yè)生產(chǎn)效率

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
,一次生成深度信息。
自主機器人定位任務(wù)的本質(zhì)是對機器人自身狀態(tài)的估計問題,包括位置,朝向,速度等問題。
路徑規(guī)劃旨在找到從起點到目標(biāo)區(qū)域的路徑,確保路徑的可行性和最優(yōu)性。路徑規(guī)劃方法包括變分方法,圖搜
發(fā)表于 01-04 19:22
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
指令和當(dāng)前機器人靜態(tài)圖像,生成一段預(yù)測的未來狀態(tài)視頻。從這些預(yù)測視頻中,可以提取機器人的位姿信息,并解碼出控制所需的速度、加速度等關(guān)鍵參數(shù),再傳遞給機器人進行實際控制。目前,這種方法已
發(fā)表于 12-29 23:04
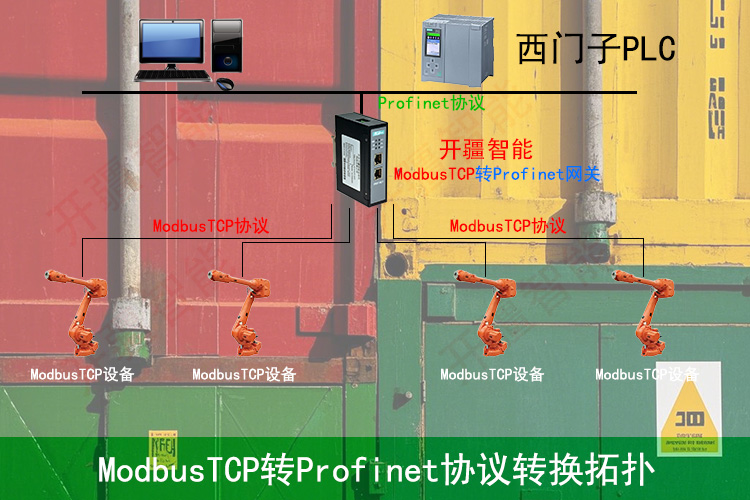
ModbusTCP轉(zhuǎn)Profinet:ABB機器人與PLC的高效連接
在工業(yè)自動化領(lǐng)域,不同設(shè)備間的通訊和數(shù)據(jù)交換是系統(tǒng)穩(wěn)定運行的關(guān)鍵。其中,ABB機器人與PLC(可編程邏輯控制器)之間的協(xié)作尤為重要。為實現(xiàn)這一目標(biāo),我們常常需要通過特定的通訊協(xié)議進行數(shù)據(jù)的傳輸和指令
ModbusTCP轉(zhuǎn)Profinet:ABB機器人與PLC的高效連接
在工業(yè)自動化領(lǐng)域,不同設(shè)備間的通訊和數(shù)據(jù)交換是系統(tǒng)穩(wěn)定運行的關(guān)鍵。其中,ABB機器人與PLC(可編程邏輯控制器)之間的協(xié)作尤為重要。為實現(xiàn)這一目標(biāo),我們常常需要通過特定的通訊協(xié)議進行數(shù)據(jù)的傳輸和指令
ABB擴大模塊化工業(yè)機器人產(chǎn)品線,打造高靈活定制化生產(chǎn)
隨著自動化浪潮不斷推進,工廠生產(chǎn)線對機器人的需求與日俱增。近年來,全球機器人巨頭ABB緊跟市場脈搏,推出一系列創(chuàng)新產(chǎn)品。近日,ABB機器人擴





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論