") 如何去構(gòu)建仿真機器人工具
如何去構(gòu)建仿真機器人工具
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208428 -
LabVIEW
+關(guān)注
關(guān)注
1977文章
3657瀏覽量
325655 -
NI
+關(guān)注
關(guān)注
19文章
1123瀏覽量
100621
發(fā)布評論請先 登錄
相關(guān)推薦
發(fā)那科ROBOGUIDE機器人仿真助手入門
? 發(fā)那科ROBOGUIDE 是一款強大的機器人仿真助手 專門為發(fā)那科機器人設(shè)計 本文給大家分享一下 ?ROBOGUIDE入門-創(chuàng)建項目? 在開始操作前 要先安裝好ROBOGUIDE軟件

物理仿真人形機器人的統(tǒng)一全身控制策略
創(chuàng)建動作自然并對各種控制輸入做出智能響應(yīng)的交互式仿真人形機器人仍是計算機動畫和機器人技術(shù)領(lǐng)域最具挑戰(zhàn)性的問題之一。NVIDIA Isaac Sim等高性能 GPU 加速仿真器以及使用N

NVIDIA技術(shù)推動機器人仿真
借助機器人仿真,開發(fā)人員能夠在基于物理學(xué)的現(xiàn)實世界數(shù)字呈現(xiàn)中對機器人進行虛擬訓(xùn)練、測試和驗證。
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領(lǐng)域的大模型技術(shù)在多個方向上取得了突破性的進展,特別是在機器人控制領(lǐng)域展現(xiàn)出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大
發(fā)表于 12-29 23:04
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
對人工智能、機器人技術(shù)和計算系統(tǒng)交叉領(lǐng)域感興趣的讀者來說不可或缺的書。這本書深入探討了具身智能這一結(jié)合物理機器人和智能算法的領(lǐng)域,該領(lǐng)域正在塑造自主系統(tǒng)及其應(yīng)用的未來。
開篇部分探討了具身智能
發(fā)表于 12-28 21:12
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
嵌入式人工智能(EAI)將人工智能集成到機器人等物理實體中,使它們能夠感知、學(xué)習(xí)環(huán)境并與之動態(tài)交互。這種能力使此類機器人能夠在人類社會中有效地提供商品及服務(wù)。
數(shù)據(jù)是一種貨幣化
發(fā)表于 12-24 00:33
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
動態(tài)互動的。
該理論強調(diào)智能行為源于智能體的物理存在和行為能力,智能體必須具備感知環(huán)境并在其中執(zhí)行任務(wù)的能力。具身智能的實現(xiàn)涵蓋了機器學(xué)習(xí)、人工智能、機器人學(xué)、計算機視覺、自然語言處理及強化學(xué)習(xí)等領(lǐng)域
發(fā)表于 12-20 19:17
NVIDIA發(fā)布全新AI和仿真工具以及工作流
NVIDIA 在本周于德國慕尼黑舉行的機器人學(xué)習(xí)大會(CoRL)上發(fā)布了全新 AI 和仿真工具以及工作流。機器人開發(fā)者可以使用這些工具和工作
利用NVIDIA Isaac平臺構(gòu)建、設(shè)計并部署機器人應(yīng)用
機器人在智能制造設(shè)施、商業(yè)廚房、醫(yī)院、倉庫物流和農(nóng)業(yè)領(lǐng)域等不同環(huán)境中的應(yīng)用正在迅速擴展。該行業(yè)正在向智能自動化轉(zhuǎn)變,這需要增強的機器人功能來執(zhí)行感知、地圖構(gòu)建、導(dǎo)航、負載處理、物體抓取和復(fù)雜的裝配

機器人仿真的類型和優(yōu)勢
機器人仿真使機器人工程師和研究人員能夠創(chuàng)建機器人及其環(huán)境的虛擬模型。這項技術(shù)支持在仿真的無風(fēng)險環(huán)境中測試和驗證

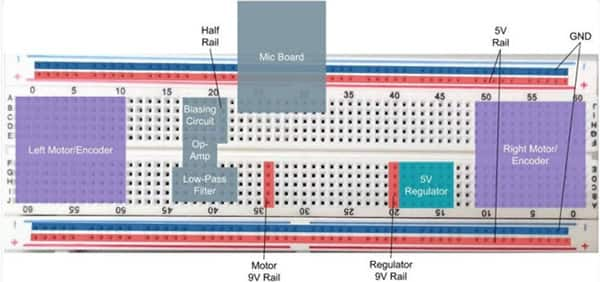
構(gòu)建語音控制機器人 - 深入研究電路
2024-07-29 |Annabel Ng S1XT33N項目 正如[之前的博客文章]中提到的,加州大學(xué)伯克利分校的 EECS 16B 課程重點關(guān)注構(gòu)建名為 S1XT33N 的語音控制機器人的為期
abb機器人工具坐標(biāo)系問題
各位大佬請教一下,abb機器人工具坐標(biāo)系用四點法,六點法,手動輸入等方式標(biāo)定出的工具坐標(biāo)系的Z方向與實際工具的長度不符,實際工具長度越長坐標(biāo)系z方向的差距越大。比如實際
發(fā)表于 08-07 11:11
工業(yè)機器人仿真軟件有哪些
工業(yè)機器人仿真軟件是用于模擬工業(yè)機器人操作過程的軟件工具,它們可以幫助工程師和技術(shù)人員在實際應(yīng)用之前對機器人進行測試和優(yōu)化。以下是一些常見的
NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術(shù),加速 AI 機器人技術(shù)的發(fā)展
NVIDIA 發(fā)布了 Isaac Manipulator 和 Isaac Perceptor 等一系列基礎(chǔ)模型、機器人工具和 GPU 加速庫。 NVIDIA 創(chuàng)始人兼首席執(zhí)行官黃仁勛在臺上向一萬多名

NVIDIA Isaac機器人平臺升級,加速AI機器人技術(shù)革新
NVIDIA Isaac機器人平臺近期實現(xiàn)重大升級,通過引入最新的生成式AI技術(shù)和先進的仿真技術(shù),顯著加速了AI機器人技術(shù)的發(fā)展步伐。該平臺正不斷擴展其基礎(chǔ)模型、機器人學(xué)習(xí)框架、AI工





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論